С навесным двусторонним приводом
В конвертерах вместимостью 350—400 т применяются механизмы поворота с двухсторонним приводом навесного типа.
Привод состоит из одноступенчатого тихоходного редуктора, насаженного па цапфу конвертера, шести трехступенчатых быстроходных редукторов навесного типа с электродвигателями. Корпуса редукторов через гидравлические демпферы соединены с качающейся рамой, которая с помощыо тяг связана с основанием. Такая конструкция предупреждает поворот корпуса под действием реактивного опрокидывающего момента. Преимуществом двухстороннего привода перед односторонним является уменьшение крутящих моментов, подводимых к цапфе и опорному кольцу, в 2 раза.
Кинематическая схема механизма поворота, систем фиксирования тихоходного и быстроходного редукторов и опор конвертера вместимостью 350—400 т приведены на рис. 45. Привод включает тихоходный редуктор 1, шесть трехступенчатых быстроходных редукторов 4, шесть электродвигателей 5 со встроенными тормозами и системы фиксирования тихоходного и быстроходных редукторов.
Тихоходный редуктор выполнен с шестью приводными налами — шестернями 6 и втулкой колеса 7 посажен на коническую шейку 2 цапфы опорного кольца 9. Корпус редуктора соединен с качающейся рамой 16, которая через гидравлический демпфер 17 связана с основанием. Такая конструкция предупреждает поворот корпуса под лопсгинем реактивного опрокидывающего момента и производит демпфирование динамических нагрузок, действующих на тихоходный редуктор. Сферические шарниры в узлах крепления демпфера обеспечивают его самоустановлен не при перекосах.
Неподвижная 8 подшипниковая опора смонтирована на опорных колоннах 11, 14 с фиксатором 13, плавающая — па колонне с подвижным фиксатором 12.
Быстроходные редукторы втулками 3 колес последних передач посажены па конические хвостовики иалов — шестерен тихоходного редуктора. Редукторы установлены на пружинных демпферах 15 с впнтонымп стяжками, связывающими корпусы редукторов с качающейся рамой пли корпусом тихоходного редуктора.
Автоматическая остановка конвертера в заданных положениях производится двумя командоаппаратамп. Углы поворота конвертера регистрируются па пульте управления сельешцмп. Командоаипараты и сельсин-датчик приводятся от двух валов-шестерен тихоходного редуктора через кинематические редукторы. Скорость поворота конвертера измеряется и поддерживается посредством двух тахогеператоров, соединенных с ведущими валами двух быстроходных редукторов. Питание электродвигателей приводов осуществляется от тиристорных регулируемых источников постоянного напряжения (РИН). Электродвигатели левого и правого приводов выделены в группы по два и соединены между собой по последовательно-перекрестной схеме. Такое соединение силовых цепей электродвигателей позволяет выравнять их крутящие моменты и значительно уменьшить уравнительный момент, передаваемый через опорное кольцо.
Преимуществами навесных мпогодвигательных приводов являются
значительное повышение надежности работы механизма поворота
конвертера,так как выход из строя части электродвигателей не приво
дит к отказу в работе; ликвидация длинных палопрнводов и примене
ние демпферов в системах фиксирования тихоходного и быстроходных
редукторов привело к резкому снижению динамических нагрузок в
прив де; многократно разветвленные мощности в тихоходном редукторе
позволили уменьшить нагрузки на зубья передачи, принять меньший
модуль и свести к минимуму габариты редуктора; применение навес
ных быстроходных редукторов позволило производить их быструю
замену и создало условия для организации поузлоиого централизован
ного ремонта; перекос цапф на работоспособность привода не плияет;
значительно уменьшены общие габариты привода и площадь, занимае
мая им п цехе; масса навесного привода в 2—3 раза меньше массы стаионарного привода той же мощности; илмесной привод не требует специального массивного фундамента.
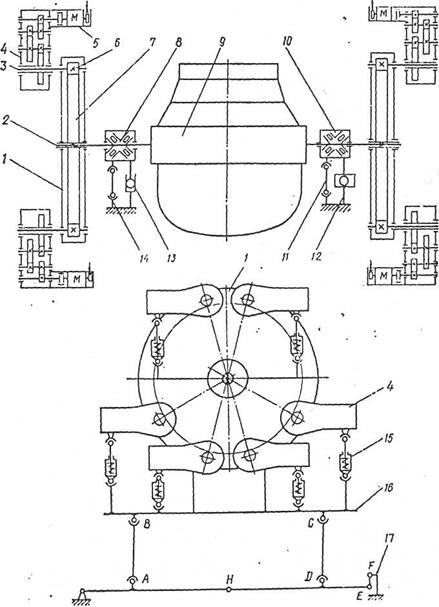
Рис.45. Кинематические схемы механизма поворота конвентора
Дата добавления: 2015-09-23; просмотров: 2039;