Двухсторонним приводом.
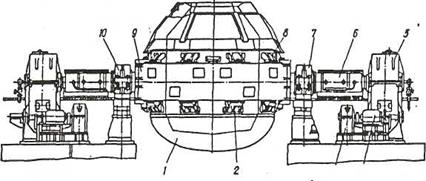
На рис.44 , а прииедена конструкция конвертера вместимостью 250 т со стационарным двухсторонним приводом. Корпус 1 конвертера глуходонный, сварной конструкции, на горловине закреплен водоох-лаждаемый шлем. Корпус в опорном кольце 9 закреплен шестнадцатью кронштейнами, приваренными к корпусу сверху и снизу кольца. Верхними кронштейнами 5 корпус опирается на верхний пояс опорного кольца. Нижние кронштейны 2 выполнены с наклонными плоскостями и находятся в контакте с угловыми башмаками, приваренными к опорному кольцу. Правильный выбор угла наклона контактных поверхностей нижних опорных узлов в зависимости от коэффициента трепня и тепловых деформаций должен обеспечивать надежность крепления и независимость деформаций опорного кольца и корпуса коивертера при их нагревании. Узлы крепления закрыты от попаданий металла и шлака кожухом. Опорное кольцо составное. Цапфо-вые плиты прикреплены»к полукольцам шпильками.
Опоры конвертера 7, 10 установлены на сварных станинах. В подшипниковых узлах использованы специальные сферические и конические роликоподшипники. Одна опора выполнена фиксированной, другая — плавающей. Такое устройство опорно-поворотной части обеспечивает компенсацию перекоса и осевое смещение цапф при тепловых и силовых деформациях опорного кольца. Приводы механизма поворота конвертера с электродвигателем 4 и редуктором S установлены на отдельных рамах; редуктор.5 соединен с цапфами опорного кольца универсальными шпинделями 6, выполняющими роль компенсирующих соединительных муфт. Каждый привод (рис. 44, б) снабжен двумя электродвигателями.-постоянного тока 2, двумя тормозами 3, двумя быстроходными двухступенчатыми редукторами 1, тихоходным, двухступенчатым редуктором 4 с двумя ведущими валами и универсальными шпинделями 9, обеспечивающими нормальную работу подшипников тихоходного редуктора при перекосе приводной цапфы 10 и деформации металлоконструкций. Скорость поворота конвертера контролируется тахогенератором 8, включенным'в схему управления электроприводом и соединенным через одноступенчатый кинематический редуктор 7 с электродвигателем. Остановка конвертера в заданных положениях производится командо-аппаратом 6, соединенным с промежуточным валом тихоходного редуктора. От командоаппарата приводится во вращение сельсин-датчик 5, передающий показания угла наклона конвертера на пульт управления. В конвертерах с приводами навесного типа устранено раскачивание корпуса, повышена эксплуатационная надежность, значительно уменьшена масса и габариты механизма.
|

|
Рис.44. Конвертер вместимостью 250 т со стационарным приводом (а)и его кинематическая схема механизма попорота (б)
Дата добавления: 2015-09-23; просмотров: 1479;