Тема 1.2. Плоская система сходящихся сил.
1.2.1. Система сходящихся сил.
1.2.2. Геометрические способы сложения сходящихся сил.
1.2.3. Аналитический метод сложения сходящихся сил.
1.2.4. Условия равновесия плоской системы сходящихся сил.
1.2.5. Разложение силы на две сходящиеся составляющие.
 | 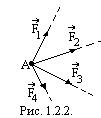 | ||
1.2.1. Система сил, линии действия которых лежат в одной плоскости и пересекаются в одной точке (рис. 1.2.1.), называется плоской системой сходящихся сил. Используя следствие1 из аксиом статики , любую систему сходящихся сил можно заменить эквивалентной системой сил, приложенных к одной точке (рис. 1.2.2.).
1.2.2. Наиболее просто решается задача о сложении двух сил, приложенных в одной точке. Для этого надо воспользоваться третьей аксиомой статики (рис. 1.2.3.).
|
 ;
;  ;
(1.2.1)
;
(1.2.1)
 .
.
 |
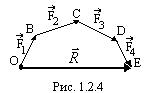 При сложении нескольких сил (рис. 1.2.1.) можно воспользоваться правилом многоугольника (рис. 1.2.4.): от произвольной точки откладываем вектор, равный силе
При сложении нескольких сил (рис. 1.2.1.) можно воспользоваться правилом многоугольника (рис. 1.2.4.): от произвольной точки откладываем вектор, равный силе  ; от конца откладываем вектор, равный силе
; от конца откладываем вектор, равный силе  ; от конца откладываем вектор, равный силе
; от конца откладываем вектор, равный силе  и т.д. Затем, соединяя начало вектора (точка О) с концом последнего
и т.д. Затем, соединяя начало вектора (точка О) с концом последнего  (точка Е), получаем главный вектор данной системы сил. Построенная фигура называется силовым многоугольником. Для сходящейся системы сил понятие главного вектора эквивалентно понятию равнодействующей силы.
(точка Е), получаем главный вектор данной системы сил. Построенная фигура называется силовым многоугольником. Для сходящейся системы сил понятие главного вектора эквивалентно понятию равнодействующей силы.
Таким образом, равнодействующая  плоской системы сходящихся сил равна их геометрической сумме:
плоской системы сходящихся сил равна их геометрической сумме:  .
.
1.2.3. Аналитическое определение равнодействующей системы сходящихся сил, т.е. определение модуля и направления искомого вектора путём вычисления, основано на применении метода проекции.
Проекция равнодействующей системы сходящихся сил  на какую-либо ось равна алгебраической сумме проекций составляющих сил на эту ось:
на какую-либо ось равна алгебраической сумме проекций составляющих сил на эту ось:
 (1.2.2.)
(1.2.2.)
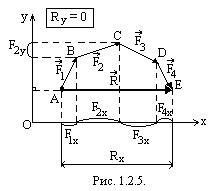 где
где  - проекции, соответственно, сил
- проекции, соответственно, сил  на ось Ox;
на ось Ox;  - проекции, соответственно, сил на ось Oy (рис. 1.2.5.).
- проекции, соответственно, сил на ось Oy (рис. 1.2.5.).
Модуль равнодействующей плоской системы сходящихся сил определяется формулой
 (1.2.3.)
(1.2.3.)
Углы между равнодействующей и координатными осями, а следовательно, и направление равнодействующей определяется формулами
 (1.2.4.)
(1.2.4.)
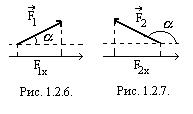 Примечание. Проекцией точки на ось называется основание перпендикуляра, опущенного из данной точки на данную ось. Длина отрезка оси (
Примечание. Проекцией точки на ось называется основание перпендикуляра, опущенного из данной точки на данную ось. Длина отрезка оси (  ), заключённого между проекциями на ось начала и конца данного вектора (
), заключённого между проекциями на ось начала и конца данного вектора (  ), взятого с определённым знаком, называется проекцией этого вектора на данную ось (рис. 1.2.6.). Проекция вектора на ось считается положительной, если вектор составляет острый угол с положительным направлением оси (рис. 1.2.6.), и отрицательной, когда вектор составляет с направлением оси проекции тупой угол (рис. 1.2.7.).
), взятого с определённым знаком, называется проекцией этого вектора на данную ось (рис. 1.2.6.). Проекция вектора на ось считается положительной, если вектор составляет острый угол с положительным направлением оси (рис. 1.2.6.), и отрицательной, когда вектор составляет с направлением оси проекции тупой угол (рис. 1.2.7.).
Проекция вектора на ось равна модулю этого вектора, умноженному на косинус угла между вектором и положительным направлением оси проекции (рис. 1.2.6.):
|

(1.2.5.)
Проекция вектора на ось представляет собой не векторную, а скалярную алгебраическую величину.
1.2.4. Из выше сказанного следует, что всякая система сходящихся сил может быть заменена равнодействующей.Ясно, что если такая система сходящихся сил находится в равновесии, то равнодействующая должна равняться нулю.
Дата добавления: 2015-09-02; просмотров: 1742;