Бортовая система контроля.
ДАТЧИКИ КОНТРОЛЬНЫХ ПРИБОРОВ
Датчики контрольных приборов являются элементами информационно-измерительной системы, обеспечивающей водителя информацией о режиме движения, работоспособности или о состоянии агрегатов и автомобиля в целом, Датчик вместе с указателем (приемником) и элементами электрической связи между ними составляют контрольный (контрольно-измерительный) прибор (рис. 1.1). Датчик устанавливается в месте из мерения и преобразует измеряемую физическую величину в пропорциональный электрический сигнал. В приемнике этот сигнал испытывает обратное преобразование.
В зависимости от назначения контрольного прибора используются различные типы датчиков: температуры, давления, уровня топлива и скорости автомобиля (датчик спидометра).
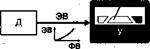 Рис. 1.1. Функциональная схема контрольного прибора:
Рис. 1.1. Функциональная схема контрольного прибора:
Д - датчик; У - указатель; ФВ - физическая величина; ЭВ - электрическая величина
Датчики температуры охлаждающей жидкости
Принцип действия. В датчиках температуры охлаждающей жидкости используются свойства металлов и полупроводников менять свое сопротивление при изменении температуры окружающей среды. Современные автомобили оснащены датчиками температуры, представляющими собой полупроводниковые резисторы с отрицательным температурным коэффициентом сопротивления (ТКС), — их сопротивление уменьшается с увеличением температуры окружающей среды. По сравнению с металлическими терморезисторами полупроводниковые обладают примерно в 10 раз большим значением ТКС, т.е. изменение температуры вызывает резкое изменение их сопротивления.
Датчик включается в электрическую цепь контрольного прибора (рис. 1.2). При изменении температуры ток, проходящий через датчик, изменяется, что вызывает отклонение стрелки указателя контрольного прибора. Сопротивление терморезистора датчика нелинейно зависит от температуры.
 |
Устройство, работа, характеристики. Во всех отечественных автомобилях применяются указатели температуры охлаждающей жидкости (термометры) логометрического типа (рис. 1.3), принцип действия которых основан на взаимодействии поля постоянного магнита 6, соединенного со стрелкой 2, с результирующим магнитным полем трех измерительных обмоток (1, 3,4), по которым протекает ток, причем величина тока в обмотке 1 зависит от сопротивления датчика.
 |
Датчик термометра (рис. 1.4) представляет собой латунный или бронзовый баллон (корпус) 3, на расширенной верхней части которого выполнены шестигранник под ключ и коническая резьба для крепления датчика. К плоскому донышку баллона прижат терморезистор 1, выполненный в виде таблетки. Между зажимом датчика и таблеткой установлена токоведущая пружина 2, которая изолирована от стенки баллона. При низкой температуре охлаждающей жидкости сопротивление датчика велико, поэтому ток в обмотке 1 (см. рис. 1.3) и ее магнитный поток будут малы. Вследствие действия результирующего магнитного потока всех трех обмоток постоянный магнит и вместе с ним стрелка 2 повернуты в левую часть шкалы указателя. С увеличением температуры охлаждающей жидкости сопротивление терморезистора уменьшается, увеличивается ток в обмотке 1 и создаваемый ею магнитный поток. Результирующий магнитный поток обмоток также изменяется, и стрелка 2 поворачивается в правую часть шкалы указателя.
Датчики давления масла
 Принцип действия. В основе работы датчиков указателей давления масла в системе смазки двигателя (манометров) лежит свойство упругих элементов деформироваться под действием давления жидкости. В качестве упругих элементов используются гофрированные металлические мембраны (рис. 1.5), жестко закрепленные по краю. Перемещение центра мембраны при ее деформации, вызванной изменением давления масла, передается на ползунок реостата (рис. 1.6). Сопротивление в цепи логометрического указателя давления изменяется, что приводит к отклонению стрелки манометра.
Принцип действия. В основе работы датчиков указателей давления масла в системе смазки двигателя (манометров) лежит свойство упругих элементов деформироваться под действием давления жидкости. В качестве упругих элементов используются гофрированные металлические мембраны (рис. 1.5), жестко закрепленные по краю. Перемещение центра мембраны при ее деформации, вызванной изменением давления масла, передается на ползунок реостата (рис. 1.6). Сопротивление в цепи логометрического указателя давления изменяется, что приводит к отклонению стрелки манометра.
Устройство, работа, характеристики. В автомобилях ГАЗ-31029, -3110, -31105, -33021, -2752; ВАЗ-2106, -2107, -21213; «Москвич-2141», -21412, Иж-2126 установлены логометрические манометры. В датчике манометра (рис. 1.7) закреплена мембрана 2 с толкателем 10. Рычажок 8 свободно качается на оси и отводится в исходное положение пружиной 7, воздействующей на двойной ползунок 4. Регулировочным винтом 9 рычажка 8 обеспечивается установка стрелки указателя в исходное положение. Проволочный стержень 11 служит для самоочистки штуцера датчика. Обмотка реостата 3 выполнена из нихро-мовой проволоки. В зависимости от величины давления масла в штуцере 1 изменяется прогиб мембраны 2, а вместе с этим изменяется положение ползунков на обмотке реостата датчика.
Указатель логометрического манометра по принципам построения и действия аналогичен указателю логометрического термометра. При включении зажигания и отсутствии давления в масляной магистрали ползунки 4 реостата под действием пружины 7 находятся в крайнем левом положении (см. рис. 1.7), что означает включение максимального сопротивления датчика в цепь указателя (рис. 1.8). При этом результирующий магнитный поток обмоток 1. 3. 4 указа теля поворачивает постоянный магнит 2 со стрелкой в левую часть шкалы указателя. При возрастании давления мембрана 2 (рис.1.7) датчика прогибается и через толкатель 10 перемещает рычажок 8, который через
 |
регулировочный винт 9 передвигает ползунки 4 вправо (рис. 1.7), уменьшая сопротивление датчика. Токи в обмотках 1,3,4 указателя (рис. 1.8) изменяются, и под воздействием результирующего магнитного потока обмоток магнит 2 со стрелкой поворачивается в правую часть шкалы, т.е. в сторону увеличения показаний давления масла.
 |  |
Характеристики датчиков логометрических указателей давления приведены в табл. 1.3
| Тип цштчиы | Ммсиналкнм дамиим. а/а* | Номинально* • | Максимальная сила ток*. А | Чуктии-тальнын •лимит | Присо«АИ-нмтальная рНьб* | Принаии-•мость |
| ММ358 | 0,15 | Реостат | Коническая 1/4" | ГАЗ-31029 | ||
| 23.3839 | 0,15 | Реостат | Коническая 1/4" | ГАЗ-3110, -31105, «Газель», «Соболь» | ||
| ММЭ93А | 0,15 | Реостат | М 14x1,5 | ВАЗ-2106. -2121 и модификации |
Датчики уровня топлива
 Принцип действия. В современных датчиках уровня топлива используются чувствительные элементы, представляющие собой полые пластмассовые поплавки цилиндрической формы. Поплавок всегда находится на поверхности топлива. При изменении уровня топлива положение поплавка изменяется, одновременно перемещается ползунок реостата (рис. 1.9), сопротивление в цепи электромаг
Принцип действия. В современных датчиках уровня топлива используются чувствительные элементы, представляющие собой полые пластмассовые поплавки цилиндрической формы. Поплавок всегда находится на поверхности топлива. При изменении уровня топлива положение поплавка изменяется, одновременно перемещается ползунок реостата (рис. 1.9), сопротивление в цепи электромаг
нитного или логометрического измерителя уровня топлива изменяется и приводит к отклонению стрелки указателя уровня топлива.
Устройство, работа, характеристики. На легковых автомобилях, как правило, используются логометриче-ские измерители уровня топлива с реостатными датчиками (рис. 1.10). Фланец 1 датчика крепится к топливному баку. К фланцу приварена приемная трубка 2 с сетчатым фильтром 9. Пластмассовый корпус 10 датчика крепится к опорной пластине 3. В корпусе размещены реостат 4, с обмоткой из нихромовой проволоки и неподвижный контакт 5 включения контрольной лампы резерва топлива. Контакт 5 соединен со штекером 11, а нижний конец реостата — со штекером 12.

Ползунок 6 реостата установлен на вращающейся оси и связан с подвижным рычагом 7, на конце которого закреплен пластмассовый поплавок 8. Корпус датчика установлен на верхней крышке топливного бака, а рычаг с поплавком — внутри. При понижении уровня топлива поплавок с рычагом перемещается вниз, а ползунок по обмотке реостата — в сторону уменьшения сопротивления реостата. В нижнем положении поплавка контакты 5 и 6 замыкаются, и включается сигнальная лампа, оповещающая водителя о снижении уровня топлива до минимального значения и необходимости произвести заправку. Характеристики датчиков уровня топлива приведены в табл. 1.4.
Датчики электронных спидометров
Принцип действия. В датчиках электронных спидометров используется «эффект Холла», названный в честь американского физика Э.Холла, открывшего это явление еще в 1879 г. Если к проводнику или полупроводнику приложено напряжение Un (рис. 1.11) и его пронизывает под прямым углом магнитное поле, обладающее индукцией В, то возникает -напряжение Холла» U и, перпендикулярное направлению тока от источника питания In и направлению магнитного поля: U„ = Кн l„ В/п,
где: Кн - постоянная Холла; ln - ток от источника питания; В - магнитная индукция; h - толщина проводника (полупроводника). 

Из выражения следует, что величина напряжения UH пропорциональна магнитной индукции В. Если магнитное поле В изменять с частотой, пропорциональной скорости движения автомобиля, то и частота изменения выходного напряжения U„ тоже будет пропорциональна скорости автомобиля. На практике магнитное поле создается неподвижным магнитом, а его изменение — специальным вращающимся экраном с прорезями. При вращении экрана 1 его сегменты 2 и прорези 3 (рис. 1.12) поочередно проходят между магнитом 4 и датчиком Холла 5. Когда между магнитом и датчиком Холла проходит сегмент экрана (рис. 1.12,а), магнитное поле перекрывается и на выходе датчика напряжение минимально (UHmin). При прохождении между магнитом и датчиком Холла прорези экрана (рис. 1.12,6) на датчик поступает максимальный магнитный поток, и на выходенапряжение становится максимаг.оным (U..ma*)- Таким образом, при вращении экрана со скоростью, пропорциональной скорости движения автомобиля, на выходе датчика Холла появляются импульсы напряжения UH (рис. 1.12, в), частота следования которых пропорциональна скорости автомобиля.
Устройство, работа. Автомобили ВАЗ-2110, -2111, -2112, -11183 ИЖ-2126, ГАЗ-3110, -31105 оснащены электронными спидометрами. Прин цип действия электронных спидометров основан на измерении частоты импульсов отдатчика скорости. Датчик скорости перечисленных автомобилей (кроме ВАЗ-11183) расположен на коробке передач и подсоединен к приводу спидометра.
 На автомобиле ВАЗ-11183 («Калина»') датчик скорости реагирует на прохождение вблизи своего сердечника задающего кольца, установленного на коробке дифференциала (рис. 1.13). В соответствии с международными стандартами датчик вырабатывает 6000 прямоугольных импульсов за 1 км пути. Эти импульсы преобразуются электронной схемой спидометра в электрический ток, измеряемый магнитоэлектрическим прибором, причем величина тока зависит от числа поступающих импульсов в единицу времени, т.е. будет пропорциональна скорости движения автомобиля. Кроме того, электронная схема путем «подсчета» поступающих импульсов обеспечивав! ра6огу шагово-'о электродвигателя, который вращает барабанчики счетчиков пройденного пути: итогового и суточного.
На автомобиле ВАЗ-11183 («Калина»') датчик скорости реагирует на прохождение вблизи своего сердечника задающего кольца, установленного на коробке дифференциала (рис. 1.13). В соответствии с международными стандартами датчик вырабатывает 6000 прямоугольных импульсов за 1 км пути. Эти импульсы преобразуются электронной схемой спидометра в электрический ток, измеряемый магнитоэлектрическим прибором, причем величина тока зависит от числа поступающих импульсов в единицу времени, т.е. будет пропорциональна скорости движения автомобиля. Кроме того, электронная схема путем «подсчета» поступающих импульсов обеспечивав! ра6огу шагово-'о электродвигателя, который вращает барабанчики счетчиков пройденного пути: итогового и суточного.
Система ABS.
Существует несколько причин для разработки системы антиблокировки тормозов (anti-blok brakes-ABS). Если при торможении одно или более колес транспортного средства блокируется (начинает скользить), возникает ряд неприятных последствий:
♦ увеличивается тормозной путь;
♦ теряется контроль над рулем;
♦ ненормально изнашиваются шины.
Блокировка колес с большой вероятностью может привести к несчастному случаю. Наилучшее замедление транспортного средства достигается тогда, когда в тормозной системе имеет место максимальное преобразование кинетической энергии автомобиля в тепловую энергию на тормозных дисках и барабанах. Скользящая шина даже на сухой дороге далеко не обеспечивает достижение предельного возможного потенциала этого процесса. Опытный водитель может сам подкачивать тормоза, нажимая и отпуская педаль, для предотвращения блокировки тормозов, но электронный контроль позволяет достигнуть гораздо лучших результатов.
ABS становится все более обычной функцией даже на недорогих автомобилях, что должно стать существенным вкладом в безопасность автомобильного движения. Важно помнить, однако, что при нормальном движении система не предназначена для того, чтобы максимально быстрые разгоны сменялись максимально короткими торможениями. Работа система должна рассматриваться как помощь только в критическом положении. На рис. 15.1 показано, как ABS может помочь в поддержании управляемости автомобиля даже при очень тяжелых условиях торможения.
Требования к ABS
Хороший способ проанализировать действие сложной системы состоит в том, чтобы задаться вопросом: «Что должна система быть в состоянии делать?» Другими словами, каковы требования к системе? Эти требования для ABS можно рассмотреть в разделах со следующими заголовками.
Откатоустойчивдя система
В случае отказа системы ABS обычные тормоза должны срабатывать на максимуме своих возможностей. Кроме того, водитель должен получить предупреждение об отказе. Предупреждение обычно реализуется с помощью простого индикатора.
Маневренность авомобиля должна быть сохранена
Послушность машины рулю и сцепление с дорогой не должны исчезнуть при включении системы ABS. Это, вероятно, ключевой вопрос, так как водителю важно быть в состоянии увернуться от опасности, хотя мощное торможение часто оказывается самым лучшим образом действия.
Реакция должна быть немедленной
Даже на коротком расстоянии система, должна реагировать так, чтобы лучше всего использовать сцепление с дорогой. Реакция должна быть адекватной независимо от того, нажимает ли водитель на тормоза метко иди нетерпеливо ударяет по ним что есть моЧн. -
Влияние на дяижеиие
Нормальное движение и маневрирование не должны оказывать никакой реакции на педаль тормоза. Устойчивость и послушность рулю должны быть сохранены при всех дорожных условиях. Система должна также адаптироваться к гистерезису торможения, то есть режиму, когда тормоза нажимают, отпускают, а затем снова нажимают. Даже если колеса с одной стороны находятся, например, на сухом гудронированном шоссе, а с другой стороны - на льду, занос (вращение вокруг верти вертикальной оси) транспортного средства должен быть сведен к минимуму, и если проявляться, то настолько медленно, чтобы дать водителю возможность его компенсировать.
Управляемые колеса
В общем случае, по крайней мере одно колесо на каждой стороне транспортного средства должно контролироваться по отдельной цели. Теперь это является общим принципом для всех четырех колес, которые на пассажирских автомобилях управляются независимо друг от друга.
Работа широком диапазоне скоростей
Система должна работать при любом снижении скорости вплоть до прогулочной. На этой очень медленной скорости, даже когда колеса заблокированы, транспортное средство придет в неподвижное состояние очень быстро.
Прочие усломм работы
Система должна быть в состоянии распознать ак-вапланирование и реагировать соответственно. Она должна также оставаться работоспособной на неровной дорожной поверхности.
Есть еще одна область, в которой система пока несовершенна, - это торможение на медленной скорости по снегу. ABS фактически увеличивает тормозной путь по снегу, но направление руления будет сохранено. Это, как полагают, является разумным обменом.
В эксплуатации находится множество различных типов систем антиблокировки тормозов, но все они пытаются Соответствовать изложенным выше требованиям.
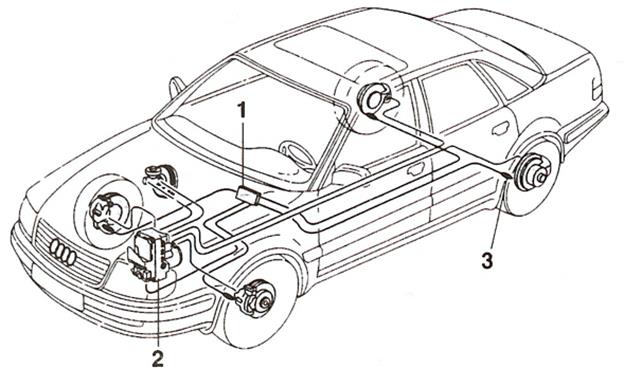
Общее описание системы
Как и в случае со всеми другими системами, ABS можно рассматривать как центральный блок управления с рядом входов и выходов. Система ABS представлена блок-схемой системы управления с замкнутым контуром (рис: 15:2). Самые важные из входов - датчики скорости колеса, а главный выход - некоторая форма контроля давления в тормозной системы.
Задача блока управления состоит в том, чтобы .сравнить сигналы от каждого датчика колеса для измерения ускорения или замедления каждого из колес. По этим данным и заранее запрограммированным справочным таблицам может регулироваться тормозное давление в одном или большем числе колес. Тормозное давление может быть уменьшено, поддерживаться постоянным или увеличиваться. Максимальное давление определяется давлением водителя на педаль тормоза.
Система во время работы использует или управляет большим количеством разных параметров, перечень которых приведен ниже.
Давление на педаль.
Определяется водителем.
Давление в тормовах
При нормальном торможении оно пропорционально давлению педали, но под контролем ABS может быть уменьшено, сохранено или увеличено.
Регулируемый переменный параметр
Это, фактически, скорость колеса, по которой можно определить его ускорение, замедление или проскальзывание, скорость зависит от изменения давления в тормозных контурах.
Условия дороги/автомобиля
Система может учитывать нагрузку автомобиля, состояние дороги, состояние шин и условия функционирования тормозной системы.
По сигналам датчиков скорости колеса ECU вычисляет перечисленные ниже величины.
Относительная скорость транспортного средства
Относительная скорость определяется по комбинации сигналов датчиков двух диагональных колес. После начала торможения ECU использует это значение.
Ускорение или замедление колеса
Значения ускорения или замедления колеса постоянно изменяются.
Проскальзывание тормоза
Проскальзывание тормоза не может быть измерено непосредственно, но его возможно Вычислить по относительной скорости транспортного средства. Это значение далее используется, чтобы определить, когда ABS должна взять под свой контроль тормозное давление.
Замедление транспортного средства
В процессе управления тормозным давлением ECU использует относительную скорость транспортного средства в качестве отправной точки и задает ее линейное уменьшение. Ускорение замедления определяется по сигналам, полученным от датчиков всех колес.
Ведущие и пассивные колеса на автомобиле нужно рассматривать по-разному, поскольку они ведут себя при торможении отлично друг от друга.
Логическая комбинация замедления/ускорения колес и скольжения используется как управляющая переменная. Фактическая стратегия, применяемая системой управления, изменяется в зависимости от условий торможения.
Компоненты ABS
Разные изготовители включают в систему множество различающихся компонентов. В большинстве систем, однако, существуют три главных компонента:
♦ датчики скорости колеса;
♦ электронный блок управления;
♦ гидравлический модулятор.
Датчики скорости колеса
Большинство датчиков скорости колес- простые индуктивные датчики, которые работают в комплексе с зубчатым колесом. Они состоят из постоянного магнита и стержня из мягкого железа, на котором намотана катушка. Поскольку зубчатое колесо вращается, изменения в магнитном сопротивлении магнитной цели вызывают сигнал, частота и напряжение которого пропорциональны скорости вращения колеса. Частота — сигнал, используемый электронным блоком управления. Сопротивление катушки около 1 кОм. Для ее соединения с блоком ECU используется коаксиальный кабель, чтобы предотвратить интерференцию, искажающую сигнал. Некоторые системы теперь используют датчики с эффектом Холла (см. гл. 2). < ..
Электронный блок управления
Функция ECU (на рис. 15.3 показана часть ECU) состоит в том, чтобы получить информацию от датчиков колес й вычислить наилучший порядок действий для гидравлического модулятора. Сердце современного ECU состоит из двух микропроцессоров типа Motorola 68НО 1, которые работают по одинаковой программе независимо друг от друга. Это гарантирует большую безопасность при любой ошибке, которая могла бы неблагоприятно повлиять на качество торможения, поэтому функционирование каждого процессора должно быть идентичным. Если ошибка обнаружена, ABS отключается и загорается индикатор предупреждения. Оба процессора имеют энергонезависимую' память, в которую могут быть записаны коды ошибки (для последующей диагностики и обслуживания). ECU также имеет подходящие каскады обработки входных сигналов и выход или мощные каскады для управления приводом модулятора.
ECU выполняет самопроверку после того, как включено зажигание. Отказ немедленно приводит к отключению системы. В списке перечислены параметры самопроверки:
♦ ток от источника питания;
♦ внешние и внутренние интерфейсы;
♦ передача данных;
♦ связь между процессорами;
♦ операции клапанов и реле;
♦ операция контроля памяти ошибок;
♦ функции чтения и записи во внутреннюю память.
Все это занимает приблизительно 300 мс.
Гидравлический модулятор
Гидравлический модулятор, показанный на рис. 1S.4, имеет три рабочих положения:
♦ увеличение давления - тормозная магистраль к главному цилиндру открывается;
♦ снижение давления - тормозная магистраль соединяется с аккумулятором тормозной жидкости;
♦ удержание давления - тормозная магистраль закрыта.
Клапанами управляют электрические соленоиды, которые благодаря низкой индуктивности имеют время реакции. Электродвигатель работает только тогда, когда ABS активирована.
Управление тормозами системой ABS
Управление давлением с помощью ABS может быть сведено к некоторому числу фаз, описанных а разделах ниже.
Начало управления давлением торможения
Начало функционирования ABS известно как «первоначальный контроль цикла сглаживания». Эта стадия сглаживания необходима, чтобы не реагировать на незначительные возмущения типа неровной дорожной поверхности, которая может вызвать изменения в сигналах датчиков колес. Порог чувствительности является критической величиной, так как если бы реакция системы была слишком быстрой, то это не понравилось бы водителю и вызвало нежелательный износ компонентов устройства. При слишком запоздалой реакции контроль над рулем и устойчивость автомобиля могли бы быть потеряны на первой фазе управления.
Упровлвние тормозами на ровном дорожной поверхности
При этих идеальных обстоятельствах степень сцепления Почти постоянна. ABS в этих условиях работает лучше всего, частота регулирования относительно низкая, с небольшими изменениями в давлении торможения.
Занос транспортного сродства (вращение «жрут вертикальной оси, отклоняющий момент)
При торможении на дорожной поверхности С различным сцеплением под левыми и правыми колесами транспортное средство будет отклоняться от курса или начнет вращаться. Водитель может справиться с этим с помощью рулевого колеса, если у него* имеется достаточное время для маневра. Справиться с ситуацией можно и другим способом - снижением давления на другое переднее колесо в тот момент, когда переднее колесо с плохим сцеплением с дорогой становится нестабильным. Это помогает уменьшить занос транспортного средства, что особенно важно, когда появляется значительный угол между транспортным средством и осью дороги. •. . . •
Вибрация оси
На неровных дорогах часто и случайным образом имеет место неустойчивость скорости колеса. Из-за этой неустойчивости давление торможения имеет тенденцию в большей степени падать, чем расти, во время действия ABS. Это могло бы привести к потере торможения при определенных условиях. Поэтому необходима адаптация системы к локальным условиям, чтобы преодолеть эту проблему Увеличение давления торможения осуществляется легче в течение периода сильного роста ускорения колеса после момента нестабильности. В современных системах мягкой подвески ось колёса может быть подвержена вибрации. Эта вибрация может вызвать дополнительные наведенные сигналы от датчиков скорости колес. Обозначенные ускорения могут оказаться точно такими же, что и для фактических нестабильных условий торможения. Небольшая задержка реакции ABS, обусловленная задержкой в сглаживании сигнала, - время, потраченное на то, чтобы переместить клапаны управления. Запаздывание в тормозных магистралях помогает уменьшать эффект вибрации оси. Регулярная частота колебаний может быть опознана блоком управления. Когда обнаруживаются колебания оси, система использует постоянное давление торможения.'
Стратегия управления
Основные положения стратегии функционирования системы антиблокировки тормозов могут быть суммированы следующим образом: '
♦ быстрое снижение давления в тормозах в момент неустойчивости скорости.колеса, чтобы
. колесо могло быстро вернуться в режим ускорения. При этом снижение давления незначительно, и режим торможения может быть снова восстановлен;
♦ быстрое Повышение давления торможения в период и после периода повторного ускорения до давления чуть меньшего, чем давление неустойчивого состояния;
♦ дискретное увеличение давления торможения в случае увеличенного сцепления с дорогой;
♦ выбор чувствительности, подходящей для превалирующих условий движения;
♦ торможение не должно быть инициировано системой антиблокировки в случае вибрации оси.
Применение этих пяти основных требований приводит к необходимости поиска компромисса между ними. Программирование процесса торможения и испытание опытных образцов позволяют уменьшить уровень компромисса, но с некоторыми неудобствами все равно приходится мириться, Очевидным примером этого является торможение по неровной земле в глубоком снегу, поскольку замедление здесь менее эффективно, если колеса не заблокированы: В этом примере приоритет отдается стабильности, а не тормозному пути, поскольку контроль направления движения при таких обстоятельствах более предпочтителен.
Варианты системы ABS
В одном из нестандартных подходов к ABS используется пружина и электтюдвигатель, чтобы создать условия торможения с уменьшением, удержанием или увеличением давления в тормозах. Потенциальное преимущество этого технического приема состоит в том, что реакция системы получается ровной, а не пульсирующей. На рис. 1S.S показана компоновка системы с мотором и пружиной.
Активная подвеска Введение
Активная подвеска, как и многие другие новации, была создана в мире Гран При1. Теперь она постепенно становится все более популярной при производстве обычных транспортных средств. Интересно отметить, что по мере того как некоторые команды, принимавшие участие в гонках «Формула-1», совершенствовали подвеску, правила изменились (1993— 1994 гг.), чтобы предотвратить ее использование!
Обычные системы подвески - это всегда компромисс между мягкими пружинами для комфорта и более жестким подпружиниванием для лучшей устойчивости движения на поворотах. Система подвески должка выполнять четыре главных функции:
♦ поглощать удары от ухабов;
справляться с «нырянием» носовой • части при торможении;
Дата добавления: 2015-11-18; просмотров: 2013;