Автомобильные навигационные системы.
Первые навигационные системы применялись только для индикации расчетного времени прибытия в пункт назначения и расстояния до него и использовати датчики азимута и скорости вращения колес. Позднее начат использоваться базы данных с картографической информацией, появилась возможность определять текущие координаты автомобиля па карте местности, для чего известны несколько методов.
Механические прототипы навигационных систем появились в США в 1910 году, когда автомобили начат производиться в больших количествах, а дороги еще не были размечены. Например, в навигационной системе Chadwick Road Guide металлический диск с отверстиями вращался синхронно с пройденным путем. Отверстия отмечали перекрестки на маршруте. К дорожкам на диске пружинами прижимались специальные молоточки. При попадании молоточка в отверстие устройство издавало звонок, и специальный рычажок с кодированным символом указывал водителю, какое необходимо выполнить действие.
Точность и надежность таких навигационных систем были низкими, их перестати использовать после стандартизации дорожных знаков в 20-х годах и введения разметки дорог.
В 60-х годах автомобильные компании вновь начаш проявлять интерес к навигационным системам. В 1987 году Toyota начата их устанавливать на серийные модели как опцию. В 1994 году в США, Европе, Японии уже было продано более 500000 автомобильных навигационных систем.
Функции, структура и составные компоненты навигационной системы
На рис. 5.14 показана структура навигационной системы. Система может осуществлять навигационное счисление, определять положение автомобиля на карте местности по конфигурации пройденного пути, определять абсолютные координаты с помощью спутниковой системы GPS (глобальная позиционирующая система или GPS — Global Positioning System). С помощью навигационного счисления определяют относительное положение автомобиля и направление движения по информации, полученной с датчиков скорости вращения колес и азимута.
Конфигурация участка пройденного пути, полученная с,помощью навигационного счисления, сравнивается с конфигурацией дорог, нанесенных на карту. Определив дорогу, но которой движется автомобиль, система находит и его текущие координаты. Более точное определение координат автомобиля на карте производится с помощью GPS по широте и долготе. Считается, что для практических целей достаточно знать координаты автомобиля с точностью до размера половины квартала, т. е. +100 метров.
Автомобильная навигационная система должна иметь в своем составе датчики пройденного пути и направления движения.
Датчик пройденного пути — это та или иная конструкция электронного одометра, информация в который поступает с датчиков скорости вращения колес ABS. Одометрам присущ ряд систематических погрешностей, которые необходимо корректировать. К. ним относятся:
1-Разница в диаметрах новой и изношенной покрышки дает погрешность в определении пройденной дистанции до 3%.
2- За счет увеличения диаметра покрышки от центробежной силы на каждые 40 км/час скорости автомобиля погрешность в определении пройденной дистанции увеличивается на 0,1...0,7%
3. Изменение давления в шинах на 689 кПа (10 psi) увеличивает погрешность на 0,25...1,1%.
Для определения направления движения автомобиля обычно используются датчик азимута, датчики скорости вращения колес, гироскопы.
Датчик азимута (компас)
Датчик азимута использует магнитное поле Земли и представляет собой кольцевой сердечник из ферромагнетика, на который намотаны обмотка возбуждения и перпендикулярно друг другу две выходные обмотки (рис. 5.15).
| Координата X |


К обмотке возбуждения приложено синусоидальное напряжение. При отсутствии внешнего магнитного поля в выходных обмотках наводится ЭДС взаимоиндукции, также синусоидальная, с нулевым средним значением. При наличии постоянного внешнего магнитного поля напряженностью // (магнитное поле Земли) происходит искажение синусоидальной формы магнитного потока в сердечнике за счет наложения постоянной составляющей и напряжений выходных обмоток (рис. 5.16)
Если внешнее магнитное поле направлено под углом 0 к обмотке X,то средние значения напряжений в выходных обмотках определятся так:
Кх = /:tfcos0,
Vy = Ј#sin0,
где k — коэффициент пропорциональности. Отсюда 0 = arctg(Ky/Kx), т. е. направление движения автомобиля определено.
Современные датчики азимута выпускаются в интегральном исполнении.
Датчик скорости вращения колес
Используются датчики скорости вращения передних колес, применяемые и для ABS. Угол поворота автомобиля определяется по разности путей, проходимых при повороте левым и правым колесом. Когда автомобиль поворачивается на угол 0 радиан с радиусом поворота R, пути, пройденные левым и правым колесами, описывают дуги с общим центром (рис. 5.17). Пути, пройденные левым и правым
передними колесами, различны и составляют: /„, = Rfi и LQ = R^B. Радиусы этих дуг имеют общий центр и определяются как:
= JR7 + L\ Rq = ^(R + K)2 + L\
где L — колесная база, а К — ширина колеи.

Введем р — отношение между протяженностями путей колес на повороте:
Преобразуем это уравнение:
„ к + ^к2 -(р2 + \шр2 -\)ь2 -к2]
К =------------- =---------------------- .
р -1
Колесная база L и ширина колеи К известны для данного автомобиля, пути правого и левого колес замеряют с помощью датчиков скорости вращения колес. Тогда угол поворота 0 вычисляется по формуле: 0 = = lJ^Jr2 + l2. Сложив все поворотные углы, можно определить и угол поворота автомобиля для заданпого пути от стартовой точки: 0
Гироскоп
 При использовании гироскопа определяется угловая скорость автомобиля на повороте и интегрируется для определения угла поворота. В навигационных системах используются различные типы гироскопов, здесь рассматривается применение газового гироскопа.
При использовании гироскопа определяется угловая скорость автомобиля на повороте и интегрируется для определения угла поворота. В навигационных системах используются различные типы гироскопов, здесь рассматривается применение газового гироскопа.
Устройство работает следующим образом. Насос создает поток гелия с заданной скоростью истечения и направляет его через сопло на две нагретые проволочки датчика. Угловая скорость автомобиля определяется по изменению сопротивлений проволочек датчика. Когда поток гелия выходит из сопла насоса, он постепенно расширяется. Распределение скоростей в потоке газа по сечению возле проволочек показано на рис. 5.18.

Когда автомобиль движется прямо, распределение скоростей симметрично относительно проволочек, они охлаждаются одинаково и на выходе мостовой схемы, частью которой являются проволочки, пулевое напряжение (рис. 5.19). При повороте возникает сила Кориолиса, сметающая газовый поток, проволочки охлаждаются неравномерно, их сопротивления электрическому току различны, на выходе мостовой схемы появляется напряжение, пропорциональное угловой скорости автомобиля на повороте.
Навигационное счисление
Навигационное счисление — это метод определения координат движущегося объекта (автомобиля, самолета, судна и т. д.) по отношению к стартовой точке. Используется сумма векторов пройденных расстояний, информация о направлениях поступает с датчика азимута или датчика скорости вращения колес. На рис. 5.20 показано применение навигационного счисления к определению координат объекта (автомобиля).
Расстояние от стартовой точки (XQ,Y0) определяется по следующей системе уравнений:
X» = *о + 2>/sin0„ Уп = У{) + ^A/sine,.,
где ось обозначает направление «восток — запад», а К — «север — юг».
Таким образом, текущие координаты автомобиля могут быть определены, если известно положение стартовой точки па карте.
Направление движения автомобиля обычно определяется по геомагнитному датчику азимута (компасу). Корпус автомобиля выполнен из металла и других магнитных материалов и способен намагничиваться внешними полями (например, в магнитном поле, создаваемом электродвигателями электровоза па железнодорожном переезде и т. д.). В этом случае возникает систематическая погрешность в определении направления движения автомобиля. Паразитное магнитное поле компенсируется дополнительными магнитами вблизи компаса.
Магнитное поле также искажается в тоннелях, па металлических мостах, при движении вдоль автопоездов. Применение датчиков скорости вращения колес наряду с компасом часто решает эту проблему. Датчики скорости вращения колес не чувствительны к таким искажениям, на практике датчики азимута и скорости вращения колес дополняют друг друга при определении направления движения автомобиля.
Навигационное счисление дает низкую точность определения текущих координат объекта. Для автомобиля приходится корректировать координаты, определенные методом навигационного счисления каждые 10...15 км. К счастью, автомобили обычно передвигаются по дорогам, которые нанесены на карту.
Электронные карты
В некоторых навигационных системах картографическая информация хранится централизованно и передается па автомобиль по радиоканалу, но в большинстве случаев навигационная система предполагает наличие необходимой базы данных на борту автомобиля.
CD-ROM используется для хранения картографической и дорожной информации с целью сравнения конфигураций дорог и пройденного пути, поиска оптимального маршрута, вывода карты местности на дисплей. Значительная емкость CD (до 600 Мб) позволяет это делать.
Картографическая информация или электронные карты существуют в двух основных форматах: матричном и векторном.
В матричном формате каждому элементу карты (пикселю) соответствуют свои значения декартовых координат X—Y. Матричные карты требуют много места в памяти компьютера или на носителе информации и неудобны для математических операций при прокладке и слежении за маршрутом.
В векторном формате дороги, улицы представляются последовательностями отрезков прямых, описанных аналитически, пересечения — узлами (рис. 5.21). Узлы идентифицируют координатами — долготой и широтой. Если дорога (улица) не прямая, в точке излома также помещается узел. Таким образом, дороги (улицы) любой конфигурации аппроксимируются набором векторов и узлов.
 |
Имеющиеся карты или изображения местности, полученные с самолетов и спутников, сканируются. Затем специальное программное обеспечение трансформирует изображение сначала в матричный, а затем в векторный формат.
Электронная карта несет такую информацию, как номера дорог, названия улиц, номера домов между перекрестками, одностороннее или двухстороннее движение на улице, названия отелей, ресторанов и т. д.

Ориентирование на карте местности по конфигурации пройденного пути
 |
Этот метод позволяет определить или уточнить текущие координаты автомобиля сравнением конфигурации пройденного пути (его участка), полученного навигационным счислением с конфигурацией дороги, по которой движется автомобиль. На рис. 5.22 показано, как сравниваются и корректируются пути, полученные навигационным счислением с картой.
Сначала навигационная система определяет, какие из близлежащих дорог могут соответствовать координатам автомобиля, определенным навигационным счислением. Затем делается сравнение, как показано на рис. 5.22. Выбирается наиболее подходящая дорога и корректируются координаты автомобиля по карте. Когда автомобиль достигает перекрестка, выбор дороги определяется направлением движения (рис. 5.23). Если дороги на перекрестке выглядят примерно одинаково, как на рис. 5.23, навигационный компьютер прослеживает их по карте вперед и определяет коэффициент корреляции для каждой из дорог по отношению к требуемому маршруту. Выбирается дорога с наибольшим коэффициентом корреляции.
Кроме определения текущих координат автомобиля, навигационная система также может выдавать информацию, облегчающую выбор оптимального пути следования к месту назначения. Для этого навигационный компьютер рассматривает дорожную сеть между исходным пунктом и пунктом назначения и выбирает кратчайший маршрут. Примером метода определения кратчайшего пути по карте является алгоритм Дейкстра (Dijkstra algorithm).
В алгоритме Дейкстра производится определение всех пересечений дорог от стартовой точки и вычисляются кратчайшие пути до каждой точки пересечения. Например, если имеется дорожная сеть, как на рис. 5.24, а, поиск пересечений начнется от начальной точки Л, как показано па рис. 5.24, б. Сначала будут рассмотрены пересечения В и С. Расстояния от точки А до каждого из пересечений указаны внутри кружочков. Затем рассматриваются пересечения Е и F, соединяющиеся с точкой С, для этих пересечений указано расстояние от стартовой точки А (рис. 5.24, б (2)). В-третьих, рассматриваются пересечения D и Е, соединенные с точкой В, на рис. 5.24, б (3) указаны расстояния от стартовой точки А до D и Е. При этом расстояние до точки Е указано через точку С, т. к. оно меньше, чем через D (было бы 8). Точка D связана с точкой Е, и маршрут через Е оказывается короче, это отражено на рис. 5.24, б (4). Кратчайшим путем до D оказывается маршрут A-C-E-D. Таким образом для дорожной сети можно определить кратчайший маршрут до любого из пересечений (жирные линии па рис. 5.24, б (6)).
Использование этого алгоритма позволяет определить кратчайший маршрут к месту назначения. Располагая современной навигационной системой, водитель может не опасаться сбиться с пути 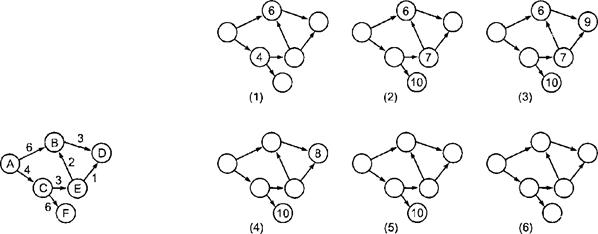
Спутниковая позиционирующая система GPS
Навигационная информация сообщается водителю различными способами: от указания символом положения на карте местности до команд голосом через синтезатор речи о необходимости повернуть налево или направо.
Система GPS (рис. 5.25) может использоваться для определения абсолютных координат автомобиля. Она состоит из 18 основных и 3 запасных спутников на околоземных орбитах (радиус 20183 км, период обращения 12 часов), запущенных министерством обороны США в период с 1980 по 1992 год (программа NA-VSTAR), и предназначена поставлять информацию об абсолютных координатах различным объектам: морским судам, самолетам, ракетам, воинским подразделениям, автомобилям и т. д. На спутниках установлены атомные часы, периодически на Землю посылаются сигналы с информацией о системном времени и параметрах орбиты на частоте 1,57542 ГГц.
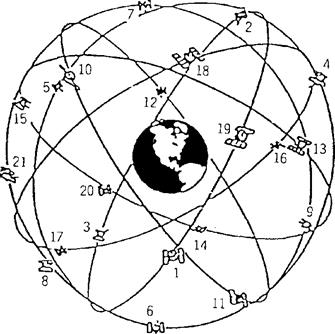
Рис. 5.25. Спутниковая система NAVSTAR
Пользователи обслуживаются системой GPS по двум категориям: точное определение координат (Precise Position Service — PPS) — для военных и стандартная точность определения координат (Standard Position Service — SPS) — для остальных категорий пользователей, в том числе и для автомобильной навигации. Теоретически достижима точность определения координат с ошибкой до 100 м, па практике координаты определяются с большей точностью — до 30 метров.
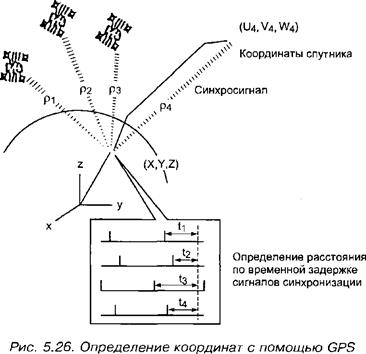
Координаты приемника {X,Y,Z) и спутника {Ui,Vi,Wi) связаны соотношением:
Pi = ftk -Ui)2 + {Y -Vi)2 + {Z' -Wif + R.
Здесь Pi — расстояние между спутником и приемником, R — временная ошибка, возникающая из-за невозможности точно синхронизировать атомные часы спутника и кварцевый генератор приемника. Таким образом при известных координатах (Ui,Vi,lVi) четырех спутников (рис. 5.26) и расстоянии от спутников до приемника Pi из решения четырехмерного нелинейного уравнения определяются координаты приемника (X,Y,Z).
Координаты спутника определяются по решению уравнения Кеплера, для чего и передается информация о системном времени.
Расстояние Pi между спутником и приемником определяется по времени задержки t; прихода синхронизирующего сигнала со спутника (скорость распространения радиоволн — постоянная величина).
Полагают, что навигация с помощью CPS является наиболее перспективной, но есть и недостатки:
1. При первом обращении начальные координаты определяются относительно долго — 2...3 минуты. В дальнейшем информация обновляется гораздо быстрее, в течение нескольких секунд.
Система работает в условиях прямой видимости с 4 спутниками. Горы и высокие здания могут служить препятствием.
Дата добавления: 2015-11-18; просмотров: 2450;