Качество регулирования при стандартных воздействиях
Переходная функция и статическая ошибка. Общераспространенность оценки качества системы по её переходной функции объясняется в основном простотой и наглядностью эксперимента для получения этой характеристики, как на модели системы, так и в реальных условиях. Следует, однако, отметить, что в реальных условиях абсолютную величину воздействия приходится выбирать достаточно малой, чтобы в процессе его отработки система не вышла за границы области, в которой линеаризованные уравнения с заданной точностью соответствуют математическому описанию физической (нелинейной) системы. При низком уровне полезного воздействия различные помехи могут совершенно исказить результат эксперимента. В этих случаях прибегают к испытаниям модели системы, к косвенному определению переходной функции по частотным характеристикам или же к специальной методике определения  по результатам статистической обработки многочисленных экспериментов.
по результатам статистической обработки многочисленных экспериментов.
Многообразие переходных функций автоматических систем можно разбить на три типа: колебательные с перерегулированием, колебательные без перерегулирования и монотонные.
Рассмотрим применение показателей качества к оценке переходной функции системы.
Точность системы автоматического регулирования при отработке ступенчатого сигнала  оценивается статической ошибкой системы
оценивается статической ошибкой системы  .
.
Статическая ошибка по управляющему воздействию. Согласно (2.4.2), ошибка по управляющему воздействию
и по теореме о предельном значении статическая ошибка
 (2.4.11)
(2.4.11)
 при условии, что в (2.4.7)
при условии, что в (2.4.7)
 (2.4.12)
(2.4.12)
Системы, обладающие этим свойством, называются астатическими по управляющему воздействию.
Если же  , то систему называют статической, при этом в виду, что согласно (2.4.11) установившееся значение её выхода при отработке постоянного управляющего сигнала отличается от требуемого (эталонного) значения тем больше, чем больше уровень входного сигнала.
, то систему называют статической, при этом в виду, что согласно (2.4.11) установившееся значение её выхода при отработке постоянного управляющего сигнала отличается от требуемого (эталонного) значения тем больше, чем больше уровень входного сигнала.
В системах автоматического регулирования, для которых справедливо условие (2.4.9),
 (2.4.13)
(2.4.13)
где k — коэффициент усиления разомкнутой системы.
Статическая ошибка по возмущению. При исследовании точности по возмущению из (2.4.2) и (2.4.10) следует, что
 (2.4.14)
(2.4.14)
где  ― передаточная функция участка системы между управляющим входом и входом исследуемого возмущения.
― передаточная функция участка системы между управляющим входом и входом исследуемого возмущения.
Статическая ошибка
 (2.4.15)
(2.4.15)
Для системы, астатической по возмущению, требуется, чтобы
 (2.4.16)
(2.4.16)
Для того чтобы система реагировала на постоянный управляющий сигнал, необходимо, чтобы  , откуда условие (2.4.16) эквивалентно требованию
, откуда условие (2.4.16) эквивалентно требованию
 (2.4.17)
(2.4.17)
Если условие (2.4.16) не выполняется, то систему называют статической по возмущению и статическую ошибку вычисляют по формуле
 (2.4.18)
(2.4.18)
где  .
.
Как видно из структурной схемы, изображенной на рисунке 2.4.1, участок  представляет собой обратную связь по рассматриваемому возмущению (участок от выхода системы до ввода возмущения), поэтому из (2.4.18) следует, что точность статической системы тем выше, чем больше коэффициент усиления цепи обратной связи (коэффициент усиления пропорционального регулятора). Однако возможность увеличения коэффициента усиления в контуре статической системы для повышения её точности по управляющему входу и возмущениям ограничена условием качества переходных процессов и, в пределе, условием устойчивости
представляет собой обратную связь по рассматриваемому возмущению (участок от выхода системы до ввода возмущения), поэтому из (2.4.18) следует, что точность статической системы тем выше, чем больше коэффициент усиления цепи обратной связи (коэффициент усиления пропорционального регулятора). Однако возможность увеличения коэффициента усиления в контуре статической системы для повышения её точности по управляющему входу и возмущениям ограничена условием качества переходных процессов и, в пределе, условием устойчивости
 (2.4.19)
(2.4.19)
Это приводит к необходимости коррекции систем автоматического управления, т.е. к такому изменению структуры и параметров, при котором можно получить одновременно и высокую точность, и требуемое качество протекания переходных процессов.
Импульсная переходная функция. Качество систем, подверженных импульсному (ударному) воздействию, а также систем, выход которых должен воспроизводить интеграл от входного сигнала, естественно оценивать по реакции системы на импульс. Системы управления с таким режимом работы широко распространены в практике, кроме того, импульсное воздействие зачастую удобно при экспериментальном определении качества реальных систем и их моделей.
Для определения качества по импульсной переходной функции  могут быть применены те же оценки, что и для определения рассогласования системы.
могут быть применены те же оценки, что и для определения рассогласования системы.
Для устойчивых замкнутых систем статическое отклонение весовой функции
 (2.4.20)
(2.4.20)
Нарушение этого условия характеризует интегрирующую (нейтральную) систему, для которой
 (2.4.21)
(2.4.21)
и уравнение (1.26) может быть записано в форме
 (2.4.22)
(2.4.22)
откуда следует, что весовая функция нейтральной системы (интегратора) характеризует её качество так же, как переходная функция — качество устойчивой системы.
Кинетическая ошибка. Точность астатических систем определяют по установившейся погрешности при отработке сигнала постоянной скорости, т.е. при воздействии

откуда
 (2.4.23)
(2.4.23)
Установившаяся погрешность при этих условиях называется кинетической ошибкой  .
.
Кинетическая ошибка по управляющему воздействию  служит основной характеристикой точности многих автоматических систем, в частности следящего привода.
служит основной характеристикой точности многих автоматических систем, в частности следящего привода.
Из (2.4.2) и (2.4.23) следует, что
 (2.4.24)
(2.4.24)
По теореме о предельном значении кинетическая ошибка
 (2.4.25)
(2.4.25)
Поскольку рассматривается астатическая система, то  при
при  по меньшей степени так же, как p. Раскрыв для этого случая неопределенность по правилу Лопиталя, получим
по меньшей степени так же, как p. Раскрыв для этого случая неопределенность по правилу Лопиталя, получим
 (2.4.26)
(2.4.26)
где
Рассмотрим астатическую систему автоматического регулирования при  и
и  , где
, где

и

— полиномы от p, причем  .
.
Передаточная функция

соответствует условию (2.4.12), если, по крайней мере  , откуда
, откуда  ;
;  .
.
Очевидно, что
где  с–1 — коэффициент усиления разомкнутой астатической системы, или её добротность. Из (2.4.26) в этом случае следует, что
с–1 — коэффициент усиления разомкнутой астатической системы, или её добротность. Из (2.4.26) в этом случае следует, что
 (2.4.27)
(2.4.27)
т.е. что кинетическая ошибка астатической системы регулирования пропорциональна скорости равномерной заводки и обратно пропорциональна добротности системы. При современных требованиях к точности следящего привода добротность достигает несколько тысяч. Очевидно, что реализация таких систем без корректирующих устройств невозможна.
Кинетическая ошибка по возмущению определяется аналогично, с заменой  на
на  .
.
Динамическая ошибка. Погрешность системы в установившемся режиме отработки произвольного типового воздействия называют динамической ошибкой системы. В большинстве случаев при этом рассматривают моногармоническое воздействие

Как показано ранее, установившийся режим (вынужденные колебания) на выходе динамической линейной системы с постоянными параметрами может быть полностью охарактеризован комплексной величиной

где  — комплексный коэффициент усиления системы при частоте
— комплексный коэффициент усиления системы при частоте  .
.
Из (2.4.2) следует, что динамическая ошибка от управляющего воздействия
 (2.4.28)
(2.4.28)
где модуль
 (2.4.29)
(2.4.29)
равен амплитудному значению динамической ошибки системы или амплитудной погрешности, а аргумент
 (2.4.30)
(2.4.30)
— сдвигу фаз между динамической ошибкой и колебаниями на входе системы.
В функции времени
 (2.4.31)
(2.4.31)
Динамическая ошибка от возмущения f определяется аналогично, с заменой  на
на  , откуда
, откуда
 (2.4.32)
(2.4.32)
где  — амплитуда синусоидального возмущения f;
— амплитуда синусоидального возмущения f;
 (2.4.33)
(2.4.33)
 (2.4.34)
(2.4.34)
и
 (2.4.35)
(2.4.35)
Поскольку рассматриваются синусоидальные колебания, то среднеквадратичная ошибка или ее эффективное значение
 (2.4.36)
(2.4.36)
Остановимся на оценке динамической точности системы автоматического регулирования, для которой  . Структурная схема этой системы представлена на рисунке 2.4.4.
. Структурная схема этой системы представлена на рисунке 2.4.4.
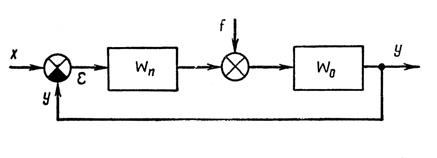
Рисунок 2.4.4 – Структурная схема системы автоматического управления
Аналитический расчёт модуля и фазы  для заданной частоты довольно трудоёмок и не всегда возможен, поскольку частотные характеристики объекта
для заданной частоты довольно трудоёмок и не всегда возможен, поскольку частотные характеристики объекта  часто даются в виде
часто даются в виде
В рабочем диапазоне частот системы
 (2.4.37)
(2.4.37)
где  — граничная частота равномерного пропускания замкнутой системы, определяемая из условия допустимых амплитудных искажений (рисунок 2.4.5) как меньший положительный корень уравнения
— граничная частота равномерного пропускания замкнутой системы, определяемая из условия допустимых амплитудных искажений (рисунок 2.4.5) как меньший положительный корень уравнения
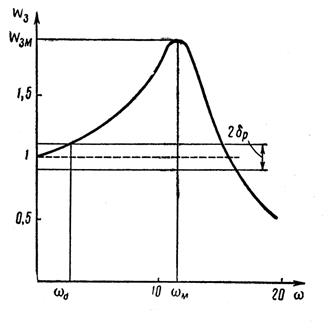
Рисунок 2.4.5 – Амплитудно-частотная характеристика замкнутой системы автоматического управления
 (2.4.38)
(2.4.38)
в котором  задается заранее. Обычно
задается заранее. Обычно  .
.
Неравенство (2.4.37) позволяет дать простую приближенную оценку динамической точности замкнутой системы по частотной характеристике разомкнутой системы. Действительно, в этом случае
 (2.4.39)
(2.4.39)
Подставляя в (2.4.29), получаем
 (2.4.40)
(2.4.40)
где  — модуль комплексного коэффициента усиления разомкнутой системы при частоте управляющего воздействия .
— модуль комплексного коэффициента усиления разомкнутой системы при частоте управляющего воздействия .
Динамическая ошибка от возмущения (нагрузки) f определяется аналогично, при этом в рабочем диапазоне частот 
 (2.4.41)
(2.4.41)
Из (2.4.40) и (2.4.41) следует, что динамическая точность системы регулирования при отработке воздействий, частота которых соответствует рабочему диапазону частот системы, тем выше, чем больше комплексный коэффициент усиления обратной связи системы на частоте этого воздействия.
Дата добавления: 2015-08-21; просмотров: 2206;