Алгоритмы трехпозиционного регулирования
Алгоритм трехпозиционных регуляторов определяется статической характеристикой: зависимостью выходных сигналов YМ (меньше) и YБ (больше) от входного Х (рис. 12).
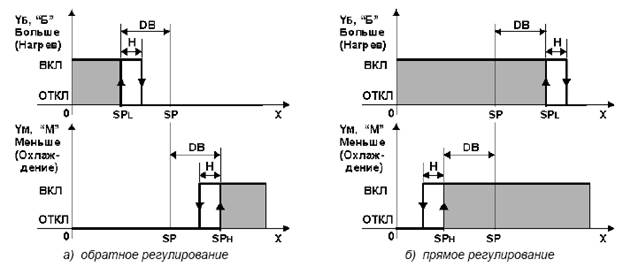
Рис. 12 Статические характеристики трехпозиционной системы регулирования
На рисунке 12-а представлена статическая характеристика трехпозиционной системы регулирования при обратном направлении регулирования. Зона регулирования без перекрытия. На рисунке 12-б представлена статическая характеристика трехпозиционной системы регулирования при прямом направлении регулирования. Зона регулирования с перекрытием. Выбор направления регулирования осуществляется в различных микропроцессорных регуляторах по разному:
- с помощью параметра «прямое-обратное регулирование»,
- с помощью знака параметра «зона нечувствительности регулятора».
При задании положительного значения параметра обеспечивается зона регулирования без перекрытия, при задании отрицательного значения - обеспечивается зона регулирования с перекрытием.
Алгоритм трехпозиционных регуляторов при обратном направлении регулирования (рис.12-а) выглядит следующим образом:
- Выходная величина YБ равна максимальному воздействию - нагреватель включен:
YБ = max при X < SP-DB, где DB-значение ширины зоны нечувствительности.
- Выходная величина YБ равна минимальному воздействию - нагреватель выключен:
YБ = 0 при X> SP-DB +Н, где Н-значение гистерезиса.
- Выходная величина YМ равна максимальному воздействию - охладитель включен:
YМ = max при X>SP+DB, где DB-значение ширины зоны нечувствительности.
- Выходная величина YМ равна минимальному воздействию - охладитель выключен:
YМ = 0 при X <SP+DB-Н, где Н-значение гистерезиса.
Дата добавления: 2015-08-11; просмотров: 1503;