Процессы регулирования с трехпозиционным законом
Процесс регулирования с трехпозиционным законом при обратном направлении регулирования представлен на рис.13. Процесс трехпозиционного регулирования является автоколебательным - регулируемая величина как в переходном, так и в установившемся режиме периодически изменяется относительно заданного значения, т.е. регулируемая величина PV (X) подвержена незатухающим колебаниям. Показателями автоколебательного режима являются амплитуда автоколебаний Ак и период автоколебаний Тк (рис.13).
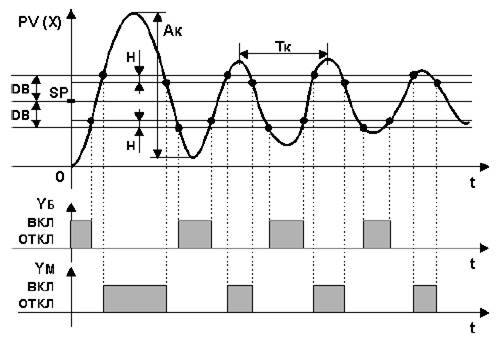
Рис. 13 Процесс регулирования с трехпозиционным законом
Частота и амплитуда колебаний зависят и определяются следующими величинами:
- от времени транспортного запаздывания τd,
- от постоянной времени обьекта Т (определяется инерционностью объекта),
- от максимальной скорости R изменения параметра Х (определяется по переходной характеристике),
- от величины зоны нечувствительности DB регулятора и гистерезиса H переключательного элемента. Для объектов с большой инерционностью (большим значением постоянной времени обьекта Т) и с малым запаздыванием τd регулирование происходит с постоянными колебаниями до 3-10% от задания SP.
- Чем больше гистерезис Н, отношение τd /Т, R - тем больше амплитуда колебаний Ак.
- Чем больше время запаздывания τd , постоянная времени обьекта Т и зона нечувствительности DB - тем больше период колебаний Тк (рис.13).
Точность регулирования технологического параметра, например, температуры зависит от величины гистерезиса. Чем меньше гистерезис, тем точнее регулирование, но тем чаще включается нагреватель и тем самым больше износ коммутационных элементов (например, реле). Уменьшая гистерезис, можно повысить качество регулирования до некоторого предела, определяемого параметрами обьекта регулирования (тепловой инерцией, мощностью нагревателя, тепловой связью нагревателя и обьекта и др.).
Дата добавления: 2015-08-11; просмотров: 1253;