Система управления с позиционным регулированием
В процессах химической технологии регулирующими параметрами обычно бывают материальные потоки сырья, полуфабрикатов, энергоносителей и другие. Изменение таких потоков производят с помощью клапанов, заслонок, задвижек, кранов и других регулирующих органов. Иногда не удается или затруднительно применить регулирующий орган, плавно изменяющий расход в трубопроводе. Например, на абразивных пульпах или агрессивных средах обычные регулирующие органы быстро изнашиваются или разрушаются. В некоторых случаях не желательны потери давления в трубопроводе на регулирующем органе. Чаще оказывается проще вместо плавного регулирования потока в трубопроводе просто включать или выключать насос. Наконец, в процессах с электрическим нагревом, как правило, подаваемую на нагрев электроэнергию не регулируют плавно, а только включают или выключают электронагрев в зависимости от значения регулируемой температуры.
Всем подобным примерам свойственна одна особенность - позиционное изменение регулирующего параметра. Если регулирующий параметр может принимать только одно из двух возможных значений (включено - выключено, открыто - закрыто и др.), то соответствующий регулятор и вся система управления называются двухпозиционными. Понятно, что ограничение регулирующего параметра ухудшает качество регулирования системы управления.
В качестве примера рассмотрим работу двухпозиционной системы управления на примере регулирования температуры плиты пресса для производства пластмассовых изделий (рис.14).
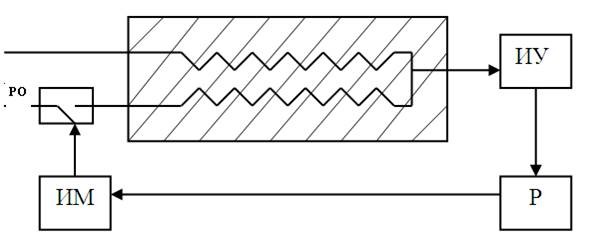
Рис. 14. Двухпозиционная система управления температуры. (ИУ – измерительное устройство, ИМ – исполнительный механизм, Р- регулятор, РО – регулирующий орган, 1 – плита, 2 – электрический нагреватель.)
В плиту 1 вмонтирован электрический нагреватель 2, подключенный к силовой электросети через выключатель, который является регулирующим органом РО. Управление выключателем производится электромагнитом исполнительного механизма ИМ. Температура плиты измеряется термопарой в комплекте с автоматическим потенциометром, образующее измерительное устройство ИУ. Результат измерения температуры передается в регулятор Р, который управляет исполнительным механизмом. При опускании температуры ниже заданной нагреватель включается, а при превышении заданной температуры - выключается.
Чтобы термопара измеряла среднюю температуру плиты, ее заглубляют в плиту, но не слишком близко к нагревателю. Сама плита с нагревателем как объект регулирования обладает значительной тепловой инерцией и запаздыванием выходного сигнала. При нагреве литы, когда нагреватель включен, повышение температуры происходит постепенно, от центра к поверхности. Поэтому термопара реагирует на включение нагревателя с запаздыванием. Точно так же при остывании плиты, когда нагреватель включен, снижение температуры распространяется от поверхности к центру и не сразу улавливается термопарой.
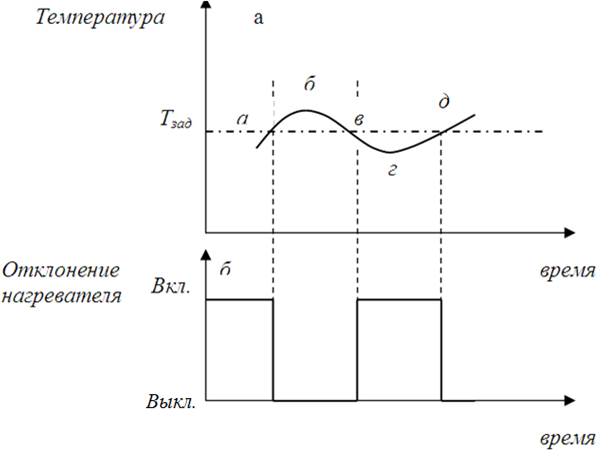
Рис. 15. Переходные процессы в двухпозиционной системе управления (а – изменение температуры (Тзад – заданная температура), б – изменение состояния нагревателя).
На рис. 15 показаны переходные процессы изменения во времени температуры плиты вместе установки термопары и напряжения нагревателя. При включенном нагревателе измеренная температура повышается, и когда она сравняется с заданной (точка а), регулятор выключает нагреватель. Однако в следствии явления запаздывания в объекте температура сначала продолжает расти, достигает некоторого максимального значения (точка б) и только после этого начинает уменьшаться. При достижении заданной температуры (точка в) снова включается нагреватель и все происходит в обратном порядке. Температура по инерции проскакивает заданное значение, достигает минимальной величины (точка г) и за тем увеличиваясь, происходит заданное значение температуры в точке д. Далее этот цикл повторяется. Как видно, в рассмотренной двухпозиционной системе управления возникают незатухающие колебания температуры возле заданного значения. Такой процесс регулирования характерен для любой позиционной системы управления.
Период колебаний (промежуток времени между точками а и д) зависит от инерции объекта: чем она больше, тем больше период колебаний регулируемого параметра. Амплитуда же колебаний в основном определяется запаздыванием в объекте и с его увеличением растет. В малоинерционных объектах период колебаний может оказаться на столько малым, что регулирующий орган будет быстро изнашиваться из-за частого срабатывания. Представленный выше объект регулирования, у которого статическая характеристика – зависимость входного сигнала (регулируемого параметра) от входного (регулирующего параметра) – была такова, что увеличение регулирующего параметра приводило либо только к увеличению, либо только к уменьшению регулируемого параметра. Так, при регулировании температуры в реакторе подачей греющего пара увеличение расхода пара всегда приводит к росту температуры. Такая зависимость называется монотонной, и это свойство объекта является отличным признаком стабилизирующих систем. Благодаря этому обратная связь в системе управления остается отрицательным во всем возможном диапазоне изменения регулируемого параметра.
ЛЕКЦИЯ 12
Повторение. Общие положения
Дата добавления: 2015-08-11; просмотров: 1350;