Двухпозиционное импульсное управление
Двухпозиционный импульсный регулятор применяется для управления электродвигателями, насосами и другим оборудованием. Данный тип управления используется в схемах, где управляющим элементом является реле (контактор, пускатель) с самоблокировкой, т.е. с установкой на "самоподхват" (рис. 8). Если из схемы управления будет дана команда ПУСК определенной длительности, замкнутся контакты ПУСК, например на 1-2 секунды, включится реле К1, замкнутся контакты К1 и управляющее реле К1 останется включенным. Если из схемы управления будет дана команда СТОП определенной длительности, разомкнутся контакты СТОП, например 1-2 секунды, выключится управляющее реле К1, разомкнутся контакты К1 и схема вернется в прежнее состояние.
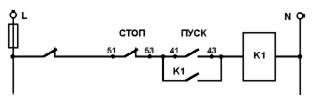
Рис. 8 Схема управления электродвигателем насоса
Параметрами настройки двухпозиционного импульсного регулятора являются:
- логика работы выходного устройства, которая представлена на рис. 6 (а-г), и может быть: меньше заданного значения, больше заданного значения, в зоне установленных значений, вне зоны установленных значений,
- длительность управляющего импульса (например, от 1 до 100 секунд).
Пример
На рис. 9 приведен процесс двухпозиционного импульсного регулирования с логикой работы больше заданного значения (MAX) и длительностью управляющего импульса 2 секунды.
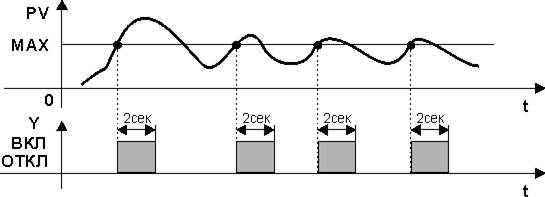
Рис. 9 Процесс двухпозиционного импульсного регулирования
Двухпозиционное итерационное регулирование с ограничением скорости
В некоторых моделях современных микропроцессорных регуляторов используется закон двухпозиционного итерационного регулирования. Основные программируемые параметры итерационного регулятора следующие: N – степень ограничения скорости изменения параметра, например N = 0…15, TPV – период времени между отсчетами вычисления итераций, TPV = 0…15 сек, Н – ширина зоны гистерезиса. Принцип и описание работы двухпозиционной итерационной системы регулирования температуры в печи с помощью нагревателя, описывается следующим образом: Если Е ≥ 0 – выключить нагреватель (используется обратный тип регулирования). Если Е < 0 – включить нагреватель, где: Е – отклонение регулирования, вычисляемое по формуле:
Е = (PVi – SP) + (PV i – PV i-1) * N
PVi, PV i-1 - отсчеты значения параметра (температуры) отстоящие на TPV секунд (например, 3 сек), SP – значение заданной точки (задания) регулятора, N - степень ограничения скорости изменения параметра, например N = 2. Чем больше это значение, тем больше ограничение скорости. Если ограничение скорости отсутствует, т.е. N=0, то Е = PVi – SP. Ограничение скорости снижает значение перерегулирования вблизи заданной точки, отключая нагреватель с упреждением. Но это может замедлить время выхода на заданную точку при разогреве печи, или при ее регулируемом остывании.
Дата добавления: 2015-08-11; просмотров: 1269;