Операционная структурная схема управляемой системы.
Операционная структурная схема – блок-схема, которая является графическим отображением уравнений системы в переменных состояния (модели типа «вход – состояние – выход»).
Динамическая структурная схема – графическое отображение уравнений системы типа «вход – выход» (т. е. используя передаточные функции звеньев, проходили в прошлом семестре).
Рассмотрим операционную структурную схему. Чтобы отобразить уравнения в переменных состояния (1) и(2) надо иметь четыре вида элементов, которые производят элементарные операции:
1. Усилитель с матричным коэффициентом А:

2. Интегратор векторных сигналов
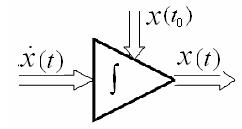
отображает уравнение
,
где x(t0) – начальное состояние,
 линия передачи векторного сигнала,
линия передачи векторного сигнала,
 линия передачи скалярного сигнала.
линия передачи скалярного сигнала.
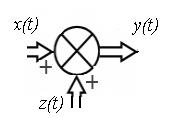
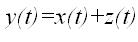
3. Сумматор векторных сигналов:
4. Точка разветвления сигнала:
Отобразим уравнения

с помощью операционной структурной схемы:
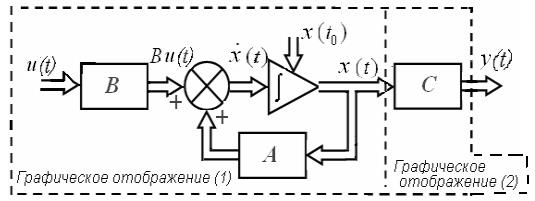
Операционные структурные схемы, отображающие уравнения (*) и (**), тоже имеют большое значение не только для теории, но и симуляции (динамического моделирования) управляемых систем. Схемы моделирования в современных пакетах, например Simulink, по сути дела представляют собой «живые» операционные структурные схемы систем, описываемых подобными уравнениями.
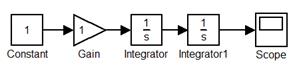
Для примера построим операционную структурную схему двойного интегратора, описываемого уравнениями


Схема в Simulink показана ниже
Дата добавления: 2015-08-14; просмотров: 1496;