В переменных состояния.
Лекция 1
Математические модели систем управления
в переменных состояния.
В данном разделе представлены математические модели систем управления в переменных состояния.
1.1. Уравнения линейных управляемых систем в переменных состояния.
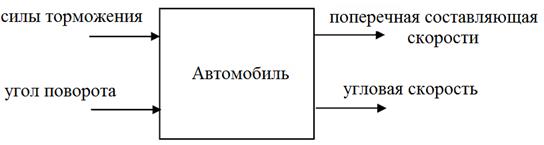
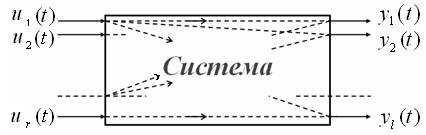 Объекты управления, приводимые управляющими устройствами в желаемое состояние, являются непрерывными динамическими системами, которые в общем случае имеют r управляющих воздействий (входов)
Объекты управления, приводимые управляющими устройствами в желаемое состояние, являются непрерывными динамическими системами, которые в общем случае имеют r управляющих воздействий (входов)  и l управляемых величин (выходов)
и l управляемых величин (выходов)  .(рис.1). Поэтому ОУ называют также управляемыми системами.
.(рис.1). Поэтому ОУ называют также управляемыми системами.
Системы с несколькими выходами и несколькими входами 
 называют многосвязными (многомерными, MIMO). Если
называют многосвязными (многомерными, MIMO). Если  , то система имеет один вход
, то система имеет один вход  и один выход
и один выход  и определяется как односвязная (одномерная , SISO) система. Таким образом, односвязную систему можно рассматривать как частный случай многосвязной системы и поэтому к описанию этих систем можно подходить с единых позиций.
и определяется как односвязная (одномерная , SISO) система. Таким образом, односвязную систему можно рассматривать как частный случай многосвязной системы и поэтому к описанию этих систем можно подходить с единых позиций.
Многомерные линейные системы описываются системой дифференциальных уравнений, каждое из которых имеет тот или иной порядок. Для целей анализа и синтеза систем удобно нормализовать эту систему уравнений и записать ее в виде системы дифференциальных уравнений первого порядка, разрешенных относительно первых производных, т. е. уравнений в форме Коши:
 , ( * )
, ( * )
 , (**)
, (**)
где  носят название переменных состояния, коэффициенты
носят название переменных состояния, коэффициенты  - некоторые постоянные, n – порядок системы. Здесь уравнение (**) представляет собой систему из l алгебраических уравнений. При постоянных коэффициентах управляемая система называется стационарной системой (системой с постоянными параметрами). Если хотя бы один из этих коэффициентов зависит от времени, то управляемую систему называют нестационарной системой (системой с переменными параметрами).
- некоторые постоянные, n – порядок системы. Здесь уравнение (**) представляет собой систему из l алгебраических уравнений. При постоянных коэффициентах управляемая система называется стационарной системой (системой с постоянными параметрами). Если хотя бы один из этих коэффициентов зависит от времени, то управляемую систему называют нестационарной системой (системой с переменными параметрами).
Состояние управляемой системы – необходимая и достаточная информация для определения будущих значений ее выходного сигнала по уравнениям типа «вход-состояние-выход» (модели системы) при заданном входном сигнале.
Обычно ( * ) и (**) , т.е. уравнения типа «вход-состояние-выход», записывают в векторно-матричной форме:
 , (1)
, (1)
 , (2)
, (2)
где вектор  называется вектором состояния, вектор
называется вектором состояния, вектор  - вектором входа, вектор
- вектором входа, вектор  - вектором выхода. Штрихом обозначена операция транспонирования.
- вектором выхода. Штрихом обозначена операция транспонирования.
 (4)
(4)
Векторная форма уравнений двойного интегратора в развернутом виде выглядит так

 .
.
Сопоставляя полученные выражения с уравнениями (1) и (2), находим
 .
.
Заметим, что в данном случае n=2, .
Примером объекта, описываемого уравнением интегратора второго порядка, является спутник, схематическое изображение которого изображено на рис. ниже.
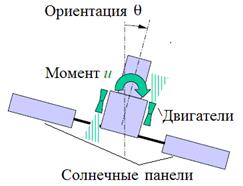
Предполагается, что спутник жесткий и что он вращается вокруг оси, перпендикулярной странице конспекта. Вращающий момент, прикладываемый к спутнику, создается двигателями. Если двигатели включены так, как показано на рисунке, это приводит к увеличению угла ориентации  . Предполагается, что момент u(t), создаваемый двигателями, является входом объекта, а угол
. Предполагается, что момент u(t), создаваемый двигателями, является входом объекта, а угол  ̶ его выходом. Тогда в соответствии со вторым законом Ньютона
̶ его выходом. Тогда в соответствии со вторым законом Ньютона
поскольку трение о воздух отсутствует (J ̶ момент инерции двигателя).
Это достаточно точная модель спутника, и она часто используется во многих приложениях. Однако если к спутнику прикреплены солнечные панели, то допущение о его жесткости уже не действует (одни части спутника могут перемещаться относительно других частей) и модель получается более сложной.
Пример 2. Управление динамикой автомобиля. Обратная связь используется для повышения безопасности путем управления торможением, чтобы прдотвратить заклинивание колес, и предотвратить скольжение на мокрой дороге.
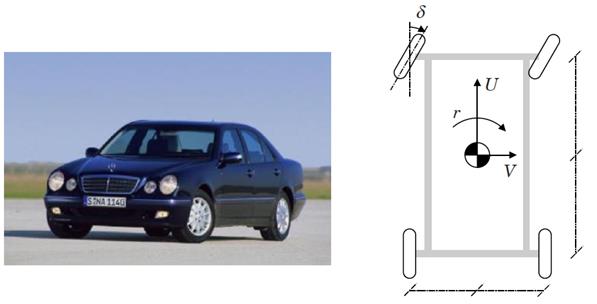
Упрощенная модель динамики автомобиля дается уравнениями

где V есть поперечная составляющая скорости и r есть угловая скорость. Имеется пять управляющих воздействий, угол поворота  и силы торможения
и силы торможения  ,
,  ,
,  ,
,  на четыре колеса. Схематическое изображение такого объекта приведено на рис. ниже.
на четыре колеса. Схематическое изображение такого объекта приведено на рис. ниже.
Команды Matlab: ss, ss2tf, tf2ss.
Например, Gtf=tf([1, [1 2 3]); Gss=ss(Gtf).
Для систем управления, описание которых представлено в переменных состояния, решение многих задач облегчается путем применения цифровых компьютеров.
Дата добавления: 2015-08-14; просмотров: 2767;