Лекция 3. Для линейных стационарных систем преобразование вход-выход определяется с помощью ПФ W(p)
Для линейных стационарных систем преобразование вход-выход определяется с помощью ПФ W(p). При этом L2 - индуцированная норма (*) равна  - норме (бесконечной норме или эйч бесконечной норме) передаточной функции, определяемой как
- норме (бесконечной норме или эйч бесконечной норме) передаточной функции, определяемой как
 .
.
Для одномерных систем эта норма равна максимальному значению АЧХ системы,
 ,
,
если W(p) не имеет правых полюсов.
Пример 1.  - коэффициент усиления линейной статической системы (усилительного звена). Выходной сигнал y такой системы связан с входным сигналом u посредством уравнения
- коэффициент усиления линейной статической системы (усилительного звена). Выходной сигнал y такой системы связан с входным сигналом u посредством уравнения
 ,
,
где k есть коэффициент усиления в обычном понимании этого названия.
Тогда квадрат второй нормы выходного сигнала такого линейной системы
Отсюда - коэффициент усиления линейной статической системы
Пример 2. - коэффициент усиления устойчивой одномерной линейной системы. Предположим, что АЧХ линейной одномерной системы  и
и  для некоторого
для некоторого  . Тогда на основании теоремы Парсеваля квадрат второй нормы выходного сигнала линейной одномерной системы
. Тогда на основании теоремы Парсеваля квадрат второй нормы выходного сигнала линейной одномерной системы

Равенство имеет место при  .
.
Следовательно,  - коэффициент усиления устойчивой одномерной линейной системы
- коэффициент усиления устойчивой одномерной линейной системы
Пусть ПФ системы
 ,
,
где T положительная постоянная. Просто находим L2 - индуцированную норму

Для многомерной линейной системы L2 - индуцированная норма равна
где  самое большое сингулярное число W(p).
самое большое сингулярное число W(p).
Дадим понятие сингулярных чисел применительно к матрице A. Собственные значения  матрицы
матрицы  будут вещественными (наибольшее
будут вещественными (наибольшее  и наименьшее
и наименьшее  собственные значения). Здесь
собственные значения). Здесь  является эрмитовой матрицей, т.е. транспонированной комплексно- сопряженной матрицей
является эрмитовой матрицей, т.е. транспонированной комплексно- сопряженной матрицей  . Самое большое (максимальное) сингулярное число матрицы A определяется как
. Самое большое (максимальное) сингулярное число матрицы A определяется как
 .
.
При этом имеет место неравенство
 .
.
Пример.

т.к. характеристическое уравнение

матрицы  имеет вещественные корни
имеет вещественные корни
являющиеся собственными значениями этой матрицы.
Определение: Сингулярными значениями матрицы  называют величины
называют величины  , где
, где  являются собственными значениями матрицы
являются собственными значениями матрицы  .
.
Наибольшее сингулярное значение обозначается как  .
.
Наименьшее сингулярное значение обозначается как  .
.
Показано, что L2 - коэффициент усиления матрицы  находится между наименьшим и наибольшим сингулярными значениями:
находится между наименьшим и наибольшим сингулярными значениями:
 . (1)
. (1)
Функция MATLAB sigma (W) вычисляет все сингулярные числа системы.
Пример. Пусть ПФ системы
Используя sigma (W), находим графики зависимости  и
и  .
.
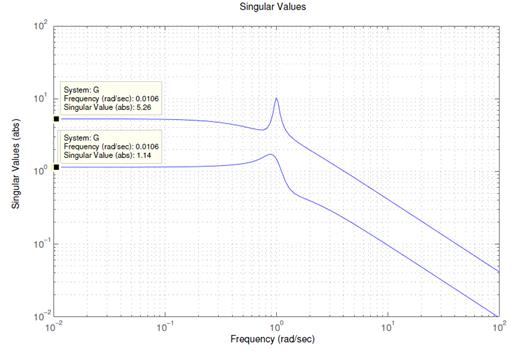
Используя команду norm (W,inf) вычисляем  .
.
Определение. Система S называется устойчивой с точки зрения «ограниченный вход – ограниченный выход» (ОВОВ устойчивой) или, другими словами, L2 - устойчивой, если ее L2 - коэффициент усиления является (ограниченным) конечным,
 <
<  .
.
Теорема о малом коэффициенте усиления.
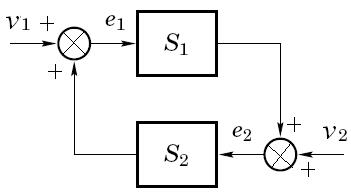
Многие системы управления с обратной связью могут быть представлены структурно в виде, показанном на рис. ниже. Здесь v1 и v2 внешние воздействия, оказывающие влияние посредством опрераторов S1 и S2 на сигналы e1 и e2 .
Пусть S1 и S2 представлют собой ОВОВ устойчивые системы .
Если
 ,
,
то замкнутая система при входах (v1, v2) и выходах (e1,e2) является ОВОВ устойчивой, т.е.  и
и  .
.
Док-во. Докажем теорему для каждого сигнала e1 и e2 . Используя второе свойство нормы и неравенство  , которое вытекает из определения коэффициента усиления системы, получаем
, которое вытекает из определения коэффициента усиления системы, получаем

Отсюда

Если ,  < ,
< ,  < , то
< , то  < .
< .
Аналогично получаем
что нас приводит к выводу, что  < .
< .
Замечание 1. Знаки суммирования сигналов не играют роли, т.к.
 .
.
Замечание 2. Теорема не предполагает линейности или стационарности и поэтому справедлива не только для линейных стационарных систем, но и для линейных нестационарных систем, и для нелинейных систем.
Примером рассматриваемой системы может служить система с обратной связью, для которой в качестве оператора  фигурирует ПФ управляющего устройства
фигурирует ПФ управляющего устройства  , в качестве оператора
, в качестве оператора  - ПФ ОУ
- ПФ ОУ  , в качестве сигналов
, в качестве сигналов  - соответственно задающее воздействие
- соответственно задающее воздействие  , возмущающее воздействие
, возмущающее воздействие  , ошибка управления
, ошибка управления  и управляющее воздействие
и управляющее воздействие  . Если ОУ с одним входом и одним выходом является устойчивым и для него L2 - коэффициент усиления
. Если ОУ с одним входом и одним выходом является устойчивым и для него L2 - коэффициент усиления  = M, а в качестве управляющего устройства используется пропорциональный регулятор с L2 - коэффициентом усиления
= M, а в качестве управляющего устройства используется пропорциональный регулятор с L2 - коэффициентом усиления  =|k|, то замкнутая система будет ОВОВ устойчивой при условии, что |k| M<1.
=|k|, то замкнутая система будет ОВОВ устойчивой при условии, что |k| M<1.
Дата добавления: 2015-08-14; просмотров: 1341;