Мехатронные модули на основе линейных двигателей.
Традиционные приводы линейных перемещений включали ротационный двигатель и механический преобразователь вращательного движения в поступательное перемещение (шариковинтовую передачу, зубчатую рейку) (рис. 3.18).
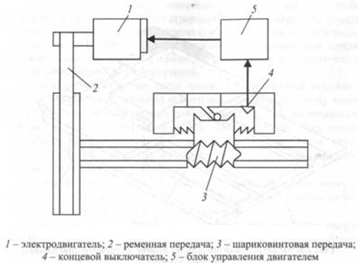
Рис.3.18. Традиционный привод линейных перемещений.
Данное решение имеет ряд серьезных недостатков:
- многоступенчатое преобразование движений от двигателя до конечного звена, большое число избыточных промежуточных элементов;
- большая инерционность (особенно в крупногабаритных машинах) из-за последовательного соединения нескольких механических звеньев;
- люфт, температурные и упругие деформации валов и винтов – эти факторы ведут к невысокой точности перемещений и возникновению прерывистых подач, особенно при реверсе;
- трение в сопрягаемых деталях, которое ведет к неизбежному изнашиванию в процессе эксплуатации; необходимость смазывания трущихся деталей;
- датчик обратной связи обычно устанавливается на валу двигателя, что не позволяет контролировать фактическое перемещение рабочего органа.
Мехатронный подход к построению модулей вращательного движения на базе высокомоментных двигателей получил в последние годы свое развитие и в модулях линейного перемещения. Цель проектирования аналогична - исключить механическую передачу из состава ММД.
Мехатронные модули линейного движения строят на базе линейных двигателей (ЛД). , С целью исключить необходимость использования механических передач в приводе подач и реализовать концепцию приводов прямого действия возникла идея создать линейный двигатель, развернув статор 1 и ротор 2 электродвигателя вращательного движения на плоскости (рис. 3.19, а). Таким образом в одном мехатронном узле конструктивно объединяются приводной и исполнительный элементы привода. Обычно на подвижной части (рабочем органе станка — суппорте, столе и др.) располагают электромагниты 3 (рис. 3.19, б), а на направляющих (неподвижной части) — постоянные магниты 4. Движение в ЛД возникает благодаря взаимодействию магнитных полей постоянных магнитов и электромагнитных катушек, т.е. происходит непосредственное преобразование энергии в линейное движение.
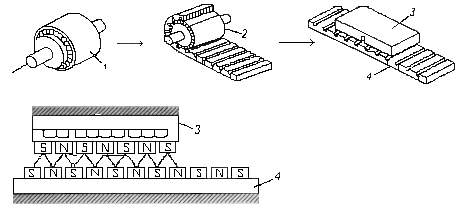
Рис. 3.19.Линейный электродвигатель.
Срок службы ЛД определяется «жизнью» постоянных магнитов. В ряде фирм используют редкоземельные неодимферроборовые (Ne-Fe-B) магниты, долголетие которых оценивается в 30 лет.
С точки зрения электромеханического преобразования энергии линейные двигатели можно разделить на:
- плоские линейные двигатели синхронные и асинхронные;
- П-образные (пазовые) линейные двигатели;
- цилиндрические линейные двигатели.
Плоские синхронные линейные двигатели.
По принципу электромеханического преобразования энергии линейные двигатели механизмов подачи разделяются на четыре вида:
а) постоянного тока (с щеточно-коллекторным узлом),
б) асинхронные (индукторные),
в) синхронные (вентильные),
г) шаговые.
По конструкции линейные двигатели подразделяются на бескорпусные (штриховые) и закрытые (с выдвижным штоком). В зависимости от требований к удельным показателям, двигатели могут иметь воздушную или жидкостную систему охлаждения.
На рис. 3.20 приведена схема управления линейным двигателем. От датчика 2 в УЧПУ поступают сигналы о температурных режимах работы статора 1 (неподвижной части) и ротора 3 (подвижной части) ЛД, а от линейной измерительной системы 5 — информация о перемещениях ротора. После сопоставления сигналов в блоке сравнения 6 сигналы передаются в УЧПУ, далее управление перемещением ротора и работой холодильного агрегата осуществляется через энергетическую цепь 4.
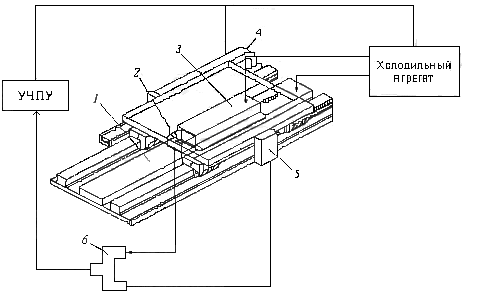
Рис.3.20. Схема управления линейным двигателем.
Мехатронные модули движения на основе линейных высокомоментных двигателей (ЛВМД) находят все большее применение в гексаподах, высокоскоростных станках (многоцелевых, фрезерных, шлифовальных), комплексах для лазерной и водоструйной резки, вспомогательном оборудовании (крестовых столах, транспортерах).
Линейные двигатели постоянного тока находят крайне ограниченное применение из-за наличия щеточно-коллектроного узла. Шаговые линейные двигатели имеют низкий КПД и развивают относительно небольшое усилие. Областью применения шаговых линейных двигателей являются графопостроители, измерительные и гравировочные машины, станки для лазерной резки, раскроечные машины.
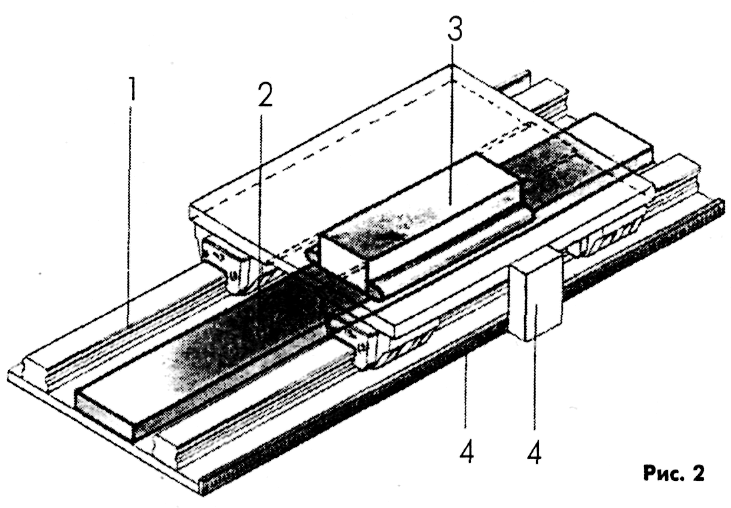
Рис.3.21. Линейный двигатель.
Наиболее широко в электроприводах механизмов подачи металлорежущих станков применяются синхронные (вентильные) и асинхронные линейные двигатели. Данные устройства состоят из следующих основных узлов (рисунок 3.21): направляющие 1, вторичная часть электродвигателя 2, первичный модуль электродвигателя 3, линейная измерительная система (датчик положения) 4.
Необходимые энергетические, силовые и точностные параметры привода обеспечиваются применением высокоэрцитивных магнитов, управляющих и измерительных устройств, другими словами, достигаются мехатронными средствами. Между ротором и статором есть воздушный зазор; статор крепится к станине или колонне станка, ротор – к рабочему органу (конечному звену).
Ротор состоит из ряда прямоугольных постоянных магнитов, изготовленных из редкоземельных материалов. Закреплены магниты на тонкой плите из специальной высокопрочной керамики, коэффициент температурного расширения которой в 2 раза меньше, чем у гранита. Использование керамики совместно с эффективной системой охлаждения решило многие проблемы линейных приводов, связанные с температурными факторами, наличием сильных магнитных полей, жесткостью конструкции и т.п. В качестве датчика обычно применяется измерительная линейка с высокой дискретностью (0,1 мкм).
К основным преимуществам мехатронных модулей на базе ЛД можно отнести:
- высокие динамические характеристики: максимальные скорости до 200 м/мин, максимальные ускорения до 5g, устойчивость к силовым перегрузкам, плавность хода;
- микронную точность движений при практически неограниченной длине перемещений;
- отсутствие трущихся частей, отсюда высокая долговечность и надежность привода;
- модульность и ремонтопригодность конструкции;
- простоту компоновки многокоординатных систем на базе линейных модулей, так как рабочие органы машин можно устанавливать непосредственно на подвижную часть линейных двигателей.
Таким образом, линейные двигатели являются перспективной базой для создания прецизионных мехатронных модулей. Широкое внедрение линейных модулей в настоящее время сдерживается их достаточно высокой стоимостью (наиболее дорогостоящими компонентами являются редкоземельные магниты), а также потребностью в дополнительных системах охлаждения и теплоизоляции.
При сравнении синхронного и асинхронного линейных двигателей следует учитывать следующие преимущества синхронного: высокое постоянное усилие подачи, большой воздушный зазор между первичным и вторичным модулем, вторичный модуль, не требует охлаждения. К недостаткам синхронного двигателя относится: наличие во вторичном модуле постоянных магнитов, что усложняет сборку и удорожает двигатель (особенно при большой длине перемещения); необходимость применения абсолютной измерительной системы или датчика Холла (система ориентации ротора). К достоинствам асинхронного двигателя относится отсутствие магнитных сил при обесточенном двигателе, что облегчает его сборку. К недостаткам асинхронного двигателя относится: меньший воздушный зазор между первичным и вторичным модулями; необходимость принудительного охлаждения вторичного модуля; меньшее усилие подачи. Система управления линейными двигателями, как правило, - цифровая, микропроцессорная, адаптивная, с дискретностью менее 0,5 мс, с полосой пропускания частот более 2 кГц. Датчик положения - линейный, с жестким закреплением к механизму, с высокой разрешающей способностью (< 0,1мм).
Плоские синхронные линейные двигатели состоят из двух основных элементов: силовой подвижной части и неподвижной вторичной части. Вторичная часть включает в себя постоянные магниты, расположенные под углом к оси движения, что обеспечивает снижение колебания системы. Металлическая конструкция подвижной части, содержащая обмотку, увеличивает интенсивность электромагнитного поля.
Первичный модуль содержит трехфазную обмотку. Он имеет фиксированные размеры, зависящие от типа исполнения двигателя, и встраивается в движущуюся часть станка (машины). Вторичная часть состоит из одного или нескольких модулей с постоянными магнитами. Длина вторичной части зависит от максимальной длины перемещения координаты и набирается из отдельных унифицированных модулей. В синхронных двигателях не требуется охлаждение вторичного модуля (машина с холодным ротором).
Преимущества плоских синхронных линейных двигателей:
- малые габариты;
- высокие удельные показатели и обеспечение высокой перегрузочной способности;
- возможность обеспечения перемещения на большие расстояния (до 6 м и более).
Недостатки плоских синхронных линейных двигателей:
- металлическая конструкция первичной части вызывает эффект прилипания;
- необходимость обеспечения высокой точности воздушного зазора (изменения воздушного зазора по длине двигателя ведет к изменению его силовых параметров; изменения величины силовых параметров может компенсироваться системой управления);
- трудоемкая установка;
- неэффективное использование магнитного поля;
- неэффективная теплоотдача.
Плоские асинхронные линейные двигатели.
Принцип действия плоского асинхронного линейного двигателя соответствует принципу действия развернутой асинхронной машины переменного тока. Асинхронный линейный двигатель состоит из подвижной части, в которой расположены трехфазные обмотки, и неподвижной части, представляющей собой короткозамкнутую обмотку типа «беличья клетка».
Преимущества плоских асинхронных линейных двигателей:
- отсутствие силы магнитного притяжения при сборке;
- возможность обеспечения перемещения на большие расстояния;
- развивают большие усилия.
Недостатки плоских асинхронных линейных двигателей:
- сложный алгоритм управления двигателем;
- высокие силы притяжения во время движения;
- отсутствие силы удержания при отключении питания двигателя;
- большие габаритные размеры;
- более низкий КПД (необходимость охлаждения неподвижной части).
П-образные (пазовые) линейные двигатели.
Название данного типа двигателей связано с П-образной формой сечения. Постоянные магниты расположены в неподвижной П-образной части двигателя. На рисунке 3.22 показано направление линий магнитного потока в сечении двигателя.
Рис. 3.22. Сечение П-образного линейного двигателя:
1 - линии магнитного потока; 2 - подвижная часть; 3 - неподвижная часть
Преимущества П-образных линейных двигателей:
- высокая плавность перемещения, что имеет особую важность в высокоточных механизмах, например в станках для лазерной резки;
- возможность обеспечения перемещения на большие расстояния;
- отсутствие силы притяжения.
Недостатки П-образных линейных двигателей:
- тепловые ограничения, так как первичная подвижная часть двигателя с трех сторон закрыта вторичной частью, что ухудшает условия ее охлаждения;
- частая необходимость охлаждения водой или воздухом;
- неэффективное использование магнитного поля;
низкая механическая жесткость.
Цилиндрические линейные двигатели.
Цилиндрические двигатели являются новейшей конструкцией линейного двигателя (рисунок.3.23а). Неподвижная часть, представляющая собой стержень (цилиндр), содержит постоянные магниты. Обмотки расположены на подвижной кольцевой части двигателя. Данные двигатели имеют наиболее высокие удельные показатели и КПД за счет того, что в нем линии магнитного поля пересекают линии тока обмоток двигателя под оптимальным углом (рисунок 3.23 б).
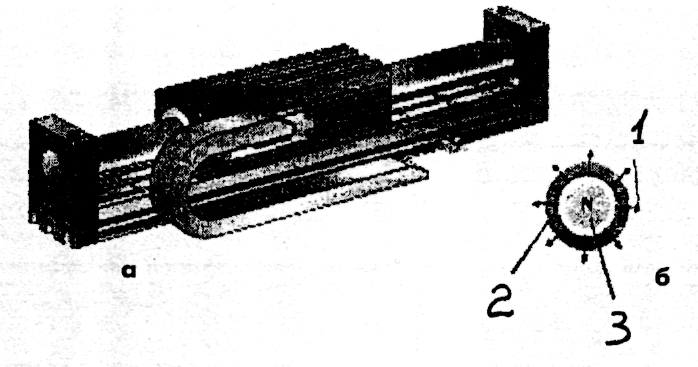
Рис. 3.23 –Цилиндрический линейный двигатель
а) Цилиндрический линейный двигатель; б) Сечение цилиндрического линейного двигателя: 1 - линии магнитного потока; 2 - подвижная часть; 3 - неподвижная часть
Преимущества цилиндрических линейных двигателей:
- оптимальное использование магнитного поля;
- низкие силы притяжения и отталкивания (благодаря симметричной конструкции магнитные поля сбалансированы);
- хорошие условия теплоотдачи (в цилиндрических двигателях неподвижная стержневая часть выполняет функции теплоотвода;
- в двигателях допустим большой воздушный зазор (до 1 мм).
Недостатки цилиндрических линейных двигателей:
- ограниченная максимальная величина рабочего хода (в настоящее время сконструированы двигатели с величиной максимального перемещения до 2000 мм, это связано с тем, что неподвижный стержень необходимо закреплять с двух сторон и учитывать его прогиб от собственного веса);
- конструкция имеет большие габариты по сравнению с другими типами линейных двигателей.
Мехатронные модули движения на основе линейных двигателей находят все большее применение в современном технологическом оборудовании. Причем сфера их применения не ограничивается единичным или мелкосерийным производством, например, в авиакосмической промышленности. Линейные двигатели все шире используются в многоцелевых станках для обработки крупных серий на операциях высокоскоростного фрезерования, шлифования, при обработке длинномерных деталей и для лазерного раскроя материалов (рис. 1.6).
В целом именно новые типы двигателей становятся основой при создании мехатронных модулей нового поколения. К их числу можно в первую очередь отнести управляемые асинхронные электродвигатели, вентильные, пьезоэлектрические и шаговые двигатели. При этом технико-экономическая эффективность модульного проектирования определяется следующими основными факторами:
1) сокращение сроков и трудоемкости проектирования многокоординатных машин, экономичность благодаря высокому уровню унификации и стандартизации элементов и интерфейсов;
2) возможность быстрой реконфигурации системы в специализированную машину под конкретную технологическую задачу без функциональной избыточности;
3) требование к обеспечению повышенной надежности и ремонтопригодности сложных комплексов при эксплуатации.
Научно-техническая проблема реализации прецизионных движений, весьма актуальная для станков как технологических макросистем, встает еще более остро при создании мехатронных миниатюрных машин и микросистем. Например, в Институте станков и прессов IWU (Кемниц, Германия) был разработан микроманипулятор, предназначенный для выполнения высокоточных сборочных операций с компонентами оптоэлектроники для оптоволоконных кабелей (размеры объекта работ 15 х 15 х 1,9 мм3; масса объекта работ 5 г; точность позиционирования 1 нм). Манипулятор оснащен двумя микросхватами с движителями на базе сплавов с памятью формы.
Важным преимуществом мехатронных модулей и систем по сравнению с традиционными решениями является компактность конструкции. Требования к массогабаритным характеристикам изделия зачастую становятся решающими при проектировании модулей движения.
Рис.3.24 Мехатронный модуль фирмы Махо "Motor AG"
В последние годы ярко выражена тенденция к созданию миниатюрных движителей и мехатронных модулей. Примером может служить миниатюрный мехатронный модуль фирмы Махо "Motor AG" (рис 3.24).
Дата добавления: 2015-08-11; просмотров: 6226;