Показатели качества систем
Создание мехатронной или робототехнической системы, как и любой технической системы, можно обосновать ожидаемыми эффектами их применения: техническим, экономическим, социальным, оборонным и т.п. При этом значения различных показателей свойств технических объектов должны быть в каждом конкретном применении ровно такими, какие необходимы для получения заданного эффекта. Так, например, технологическая машина должна быть конкурентоспособной не вообще, а в рамках требований той или иной группы потребителей. Соответственно, МО и роботы, как и другие объекты, должны быть конкурентоспособны в соответствующих областях применения. Ориентироваться на производство МО, обеспечивающих наилучшие показатели для всех типов процессов по каждому из показателей технического уровня, без учета конкретных особенностей области применения, значит заведомо ориентироваться на неэффективное производство, так как для большинства потребителей наилучшие показатели не всегда целесообразны и экономичны.
Однако каждый МО, как и другие создаваемые машинные объекты, должен удовлетворять требованиям трех уровней:
* соответствовать законам природы, то есть техническое решение должно быть физически осуществимым;
* соответствовать ресурсам и научно-техническому потенциалу общества, то есть быть технически реализуемым;
* быть экономически выгодным.
В формировании представлений о качестве как о совокупности показателей (свойств) системы, отвечающих определенным требованиям технических условий, обеспечивающих возможность реализации служебного назначения системы, прежде всего, необходимо выделить те свойства, от которых зависят результаты функционирования системы. Совокупность таких свойств в каждом конкретном случае может быть различная. Чем шире область применения МС и, следовательно, ее служебное назначение, тем полнее совокупность свойств.
2.1. Обобщенные показатели
Для систем, разрабатываемых под конкретные задачи, есть возможность не только установить совокупность их определяющих свойств, но и сформировать требования к количественным уровням показателей.
Качество функционирования систем оценивают с помощью таких показателей как эффективность, показатель эффективности или качества, критерий эффективности.
Эффективность определяется степенью соответствия системы своему назначению.
Показатель эффективности (качества) – это мера одного свойства или характеристики системы в численном выражении, в конечном итоге как результат измерения некоторого ее свойства.
Критерий эффективности может рассматриваться как мера эффективности системы в целом. Этот критерий выражается количественно и измеряет степень эффективности, обобщая все свойства системы в одной интегральной оценке – значении критерия. Для систем одного класса, создаваемых для одной цели, используется один и тот же критерий, общий для этого класса систем.
Показателями эффективности оценивается степень приспособленности системы к выполнению конкретной задачи в процесс ее функционирования. Этот процесс можно представить в виде вектора состояний системы или множеством отдельных состояний (процессов)
 i =1, …, n,
i =1, …, n,
где Zi(t) – процесс функционирования при i-ых условиях.
Все состояния множества определяются параметрами системы. Составляющей Zi(t) этого множества можно поставить в соответствие некоторое число ri из множества действительных чисел R = {ri}, которое является значением показателя эффективности R системы для ее состояния zi(t). В таком случае множество состояний системы можно отразить в множестве действительных чисел на некотором интервале (rmin, rmax) и R будет функционалом вектора состояний – показателем эффективности, характеризующим качество ее функционирования при различных условиях.
Технические устройства предназначены для работы в единственной ситуации и описываются единственным функционалом эффективности. Множество возможных значений эффективности таких систем можно представить отрезком ОЭ (рис 2.8, а) в следующих координатах: е(1) – величина эффективности; е(2) – вид функционала эффективности; е(3) – вид ситуаций. Более сложные технические системы также предназначены для работы в одной ситуации, но могут иметь векторный показатель эффективности, каждая компонента которого описывается своим функционалом эффективности.
Множество значений эффективности такой системы можно представить дискретным конечным множеством отрезков ОiЭ, i=`1,…,` n (рис.2.8, б).
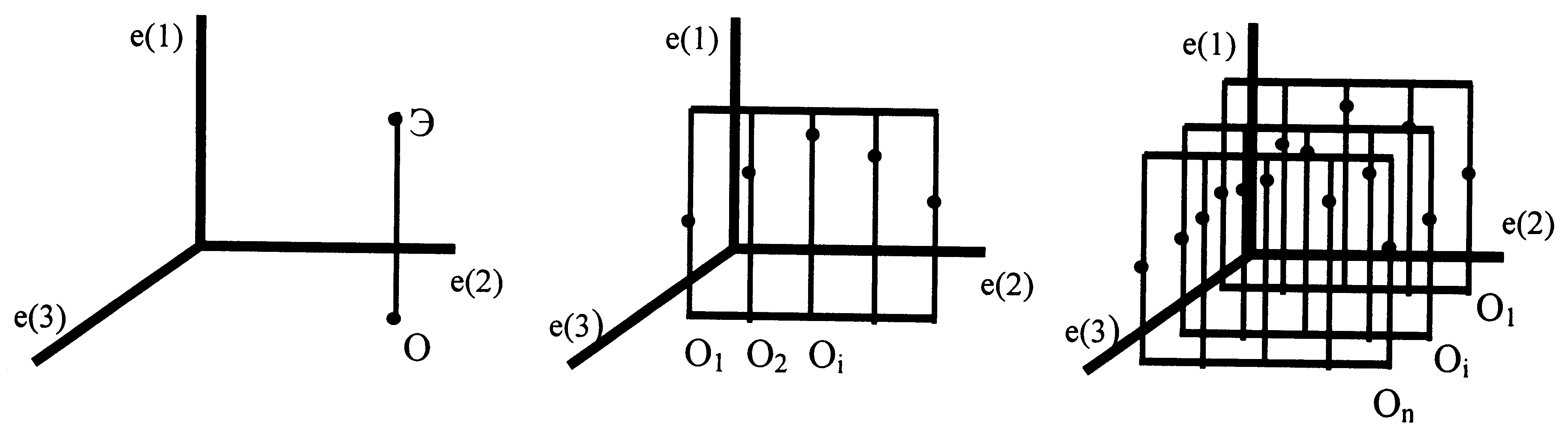
а) б) в)
Рис.2.1. Значения эффективности технических систем
Наиболее сложные технические системы предназначены для работы в ограниченном числе простых ситуаций (каждая ситуация определяется некоторым диапазоном изменения среды) и могут иметь векторный функционал эффективности. Множество значений эффективности такой системы описывается конечным дискретным множеством отрезков ОijЭ, i = `1, …,` n; j = `1, …,` m (рис. 2.8, в).
С технической точки зрения качество – это совокупность свойств (показателей) системы, отвечающих определенным требованиям технических условий (rmin, rmax), благодаря чему система может быть использована по назначению. Полезные свойства системы многочисленны и разнообразны, поэтому многочисленны и разнообразны показатели, характеризующие эти свойства.
Для сложных технических систем, таких как МО, можно предложить следующую классификацию показателей качества (рис.2.9).
| Показатели качества систем |
| Технические |
| Ресурсные |
| Надежностные |
| Структурно-функциональные |
| Удобство и безопасность |
| Быстродействие |
| Инерционность |
| Рабочие усилия |
| Ограничения по ускорению |
| Параметры среды |
| Точность позиционирования |
| КПД |
| Функциональная полнота |
| Динамическая гибкость |
| Капитальные затраты |
| Работо-способность |
| Универсаль-ность |
| Экологичность |
| Средние эксплуатационные затраты |
| Объем или габариты |
| Объем помещений |
| Масса |
| Долговечность |
| Безотказность |
| Сохраняемость |
| Ремонто-пригодность |
| Преемствен-ность |
| Управляемость |
| Структурная гибкость |
| Технологич-ность |
| Перспектив-ность |
| Унификация |
| Эргономич-ность |
| Эргатичность |
| Эстетичность |
| Помехо-защищенность |
| Удобство использования |
| Уровень шума |
Рис.2.2. Классификация показателей качества.
Все многообразие показателей, позволяющих оценить техническую систему, можно разделить на пять видов: технические, надежностные, ресурсные, структурно-функциональные и безопасности.
Технические характеристики– это основные рабочие показатели системы, включающие в себя силовые, кинематические и энергетические характеристики, чаще всего связанные с количественной оценкой функций, выполняемых системами. Примеры технических характеристик, в том числе динамических, для МС следующие: быстродействие, усилие на рабочем органе, ограничения по ускорению, инерционность, сопротивления на рабочем органе, режимы движения, точность позиционирования, путь в рабочем процессе, ограничения по мощности, параметры рабочей среды, КПД преобразования и передачи энергии, функциональная полнота, вид используемой энергии (физико-технические эффекты), динамическая гибкость как возможность обеспечения устойчивой работы с широким диапазоном динамических характеристик.
Для каждого вида систем характерно некоторое множество технических характеристик. При этом ряд характеристик для различных типов одного и того же вида могут быть одинаковы, хотя их численные значения могут изменяться от типа к типу.
Из всех технических характеристик всегда можно выделить одну, которая оказывает наибольшее влияние на эффективность системы. Между некоторыми характеристиками имеется связь. Выступая как требования к системе, эти характеристики могут оказаться противоречивыми.
К ресурсным характеристикам относятся приведенные капитальные затраты, прогнозируемые средние эксплуатационные затраты, объем и/или габариты элементов объекта, объем занимаемых помещений, масса. В ряде случаев на некоторые из них, например, габариты (объем) и массу, накладываются жесткие ограничения. Эти показатели нельзя изменять произвольно в широких пределах без ухудшения технических характеристик.
При многовариантном проектировании ресурсные характеристики целесообразно оценивать на ранних стадиях разработки.
К структурно-функциональным характеристикам относятся следующие показатели: универсальность, преемственность, управляемость, структурная гибкость как возможность компоновки из однотипных элементов рядов систем, отличающихся объемом выполняемых функций и соответственно стоимостью, надежностью и т.п., перспективность, стандартизация и унификация, технологичность.
Технологичность создаваемого объекта определяют трудоемкость его изготовления, необходимое технологическое оборудование, возможности автоматизации изготовления и сборки, серийность выпуска, применяемые материалы, точность изготовления комплектующих и др.
Для МС, имеющих большое число подсистем и сложную структуру, точное определение значения показателей надежности практически является очень сложной задачей. В таких случаях можно определить доверительные границы (интервалы) оценок надежности или использовать методы моделирования на ЭВМ.
Под задачей оптимального проектирования МС по критерию надежности понимается задача выбора на конечном множестве принципиально возможных вариантов проектируемой системы, такого ее варианта, который обеспечивал бы максимальную надежность при заданных ограничениях на технико-экономические характеристики.
Необходимо отметить, что обеспечение требуемого уровня надежности МС может быть достигнуто за счет технического обслуживания и восстановления работоспособности подсистем. Задача технического обслуживания в этом случае состоит в том, чтобы определить перед началом каждого интервала планирования конкретные сроки проведения техобслуживания элементов системы, от которых поступали заявки на техобслуживание, с учетом длительности обслуживания элементов и в интересах повышения коэффициента готовности системы.
2.2. Специфические категории качества, характерные для мехатронного объекта
История развития техники характеризуется изменением соотношения степени участия в производственном процессе техники и человека. Если на начальном этапе эволюции развития техники (орудийном) основные производственные функции принадлежали человеку, то на последующих (машинных) они все в большей степени передаются машине. Если принять во внимание традиционное определение машины как устройства, выполняющего механические движения с целью преобразования энергии, материалов и/или информации, то функции управления возлагаются на человека-оператора. В связи с развитием машиностроения существенно изменяется роль оператора во взаимодействии с машиной. Функции оператора эволюционируют от машин с ручным управлением до машин-автоматов и машин с программным управлением. Если, например, в станках-автоматах человек выполнял разработку технологической наладки, проектировал, изготавливал и устанавливал на станок механические элементы (дисковые и цилиндрические кулачки, копирные линейки и пр.) для управления, то в станках с программным управлением его функции сводились к разработке программы и ее трансляции в систему ЧПУ станка. Кроме непосредственно управления человек выполняет здесь и такие функции как материальное оснащение (например, подачу и установку заготовок), диагностику состояния и обслуживание станка, удаление стружки из рабочей зоны и пр.
Уже давно машины превзошли человека и другие живые организмы в силе, выносливости, скорости передвижения, высоте полета и многих других возможностях. На современном этапе происходит наделение машины интеллектуальными функциями, которые ранее были только прерогативой человека. Эти функции превращают машины в МО по определению.
Современные МС, создаваемые для сферы производства, при удовлетворении требований по таким категориям качества как быстродействие, точность, надежность и пр., приобретаютновые свойства. К таким свойствам относятся способность перестраиваться при изменяющихся технологических условиях, адаптироваться к ставящимся целям, учитывать состояние самих МО, т.е. выполнять неформализуемые или трудноформализуемые задачи. В этих случаях им требуется обладать функциями принятия решений и управления, близкими к интеллектуальным функциям человека.
В связи с тем, что МО существенно изменяют функции человека во взаимодействии с машиной и создают совершенно новые перспективы, анализ категорий качества МО с позиций системы «человек - машина» имеет, на наш взгляд, имеет основополагающее значение в мехатронике.
По определению человеко-машинная система [man-machine system] – система, состоящая из людей и техники, причем все ее элементы (и человек, и машина) взаимно дополняют друг друга, используя, таким образом, преимущества и того, и другого. Основное преимущество человека – в его творческом разуме, умении подходить к решаемым задачам нестандартно, эвристически. Но человек уступает машине в быстродействии, способности точно выполнять однообразные вычисления. Иначе говоря, человеко-машинная система - система, в которой человек-оператор или группа операторов взаимодействует с техническим устройством в процессе производства материальных ценностей, управления, обработки информации и т.д.
Ниже приведен перечень функций при выполнении некоторой операциичеловеко-машинной системой технологического назначения.
1. Постановка глобальной цели, целевая установка.
2. Диагностика состояния внешней среды
3. Материальное оснащение машины (М).
4. Энергетическое оснащение М.
5. Диагностика состояния М.
6. Принятие стратегических решений управления М.
7. Постановка локальных целей и задач.
8. Адаптация к условиям внешней среды и состоянию М.
9. Выработка алгоритма действий (тактика).
10.Формирование управляющих воздействий.
11.Выполнение движений рабочих органов.
12.Анализ результатов действий и выполнения задач.
13.Оперативная коррекция функций (п.п. 6 - 10) для решения последующих задач.
14.Обучение и самообучение на базе опыта.
15.Текущее техническое обслуживание М.
16.Обмен сигналами и информацией с внешней средой и другими машинами.
При этом имеется в виду, что некоторые функции могут выполняться параллельно и/или в очередности, определенной алгоритмом функционирования конкретной системы. Кроме того, функции могут быть дифференцированы в зависимости от необходимой детализации.
Нужно иметь в виду, что функции, о которых идет речь в этом разделе, относятся к последовательности управленческих и иных действий, необходимых для выполнения задачи или достижения цели. Их нельзя смешивать с перечнем функций или операций, определяемых назначением машины. Например, для станка к такому перечню относятся выполнение операций фрезерования, сверления, растачивания отверстий и пр.
В приведенном перечне функций п. 1 - постановка глобальной цели или выработка целевой установки (обобщенной задачи) выполняется человеком. Этот человек может принадлежать к разным рангам в иерархической системе управления. В одних случаях это может быть оператор низшего уровня (рабочий, наладчик) при управлении единичным технологических объектом, а в других – руководитель высокого уровня, например при разработке целевой установки для мехатронного космического объекта.
Анализ перечисленных функций позволяет сформировать нижеприведенные показатели качества МО.
Одним из характерных показателей мехатроники следует считать автономность мехатронного объекта.Автономность (от греч. autonomia - независимость) – самостоятельность, самоуправление; способность самостоятельно действовать, выполнять задачи в определенное время (например, беспилотный летательный аппарат или космический манипулятор).
Под автономностью МО понимается его способность самостоятельно выполнять поставленную человеком задачу (целевую установку) без непосредственного участия человека в процессе функционирования объекта. Автономность объекта одно из важнейших свойств, выражающееся в его способности функционировать независимо, без помощи каких-либо вспомогательных внешних систем. При этом пространственные и временные рамки выполнения задач определены человеком, дающим целевую установку.
В связи с тем, что МО может быть наделен интеллектуальными функциями очувствления, принятия решений, управления и пр., количество функций, выполняемых объектом-машиной самостоятельно, возрастает по мере совершенствования МО. Критерий автономности позволяет оценить уровень создаваемого или действующего МО, являясь основанием для суждения о его важнейшем качестве.
Для оценки этого качества предлагается такой показатель как коэффициент автономности мехатронного объекта, равный отношению количества функций, которые выполняются непосредственно объектом, к общему числу функций, реализуемых данной человеко-машинной системой:
ka= Кm /Кf = Km/(Km +Ko), (2.1)
где Кm – количество функций в определенной человеко-машинной системе, выполняемых МО самостоятельно; Кf - общее количество функций, выполняемых человеко-машинной системой; Ko - количество функций, выполняемых человеком (оператором).
Если оценить коэффициент автономности с учетом того, что 1-я функция (постановка глобальной цели или целевая установка) выполняется непременно человеком, а не машиной, получим выражение (2.2).
kа = Кm / (Кf – 1). (2.2)
Современная тенденция при построении машин нового поколения заключается в разработке МО с высокой степенью автономности и соответствующем коэффициентом kа, стремящемся к 1. Верхний предел значения коэффициентом kа определяет полную автономность системы по определению.
Важность достижения высокой автономности, свойственной возможностям мехатроники, трудно переоценить. К преимуществам следует отнести и то, что с повышением автономности МО возрастает приоритет машины в точности исполнения действий, быстродействии, надежности (работа без усталости и пр.), возможности работы во вредных или недоступных для человека условиях и пр. и пр., т.е. по свойствам, ограниченным человеческими возможностями.
В табл.2.31показано сравнение автономности различных станков (знаком « + » отмечены присутствующие в этих станках функции в соответствии с вышеприведенным перечнем 16-ти функций, выполняемых человеко-машинной системой). Представлены 5 градаций машин от простого станка до МО с развитыми функциональными возможностями для работы в «безлюдном производстве», способного автономно функционировать в течение длительного срока (например, - от манипулятора с ручным управлением до интеллектуального антропоморфного робота).
Таблица 2.1
Автономность различных станков
| Номер функции | Станок с ручным управлением | Станок-полуавтомат | Станок-автомат | Станок с ЧПУ | МО для безлюдного производства |
| - | - | - | - | + | |
| - | - | - | - | + | |
| - | - | + | + | + | |
| - | - | - | - | - | |
| - | - | - | - | + | |
| - | - | - | - | + | |
| - | - | - | + | + | |
| - | - | - | - | + | |
| - | - | - | + | + | |
| - | + | + | + | + | |
| + | + | + | + | + | |
| - | - | - | - | + | |
| - | - | - | - | + | |
| - | - | - | - | + | |
| - | - | - | + | + | |
| - | - | - | + | + |
Аналогично сформированы более «частные» (по сравнению с общим показателем автономности) показатели качества МС. К ним отнесены:
· автономность управления;
· сенсорная автономность;
· информационная обеспеченность (автономность);
· автономность обучения системы;
· адаптационная гибкость (в т.ч. реконфигурация);
· самообслуживание (в т.ч. устранение неисправностей);
· сохраняемость автономного функционирования, возможно в рамках более простого (автоматного) поведения системы;
· материальная автономность;
Дата добавления: 2015-08-11; просмотров: 5997;