Структура мехатронных и робототехнических устройств.
Типовая структурная схема мехатронного устройства приведена на рис. 1.3.1.[7]
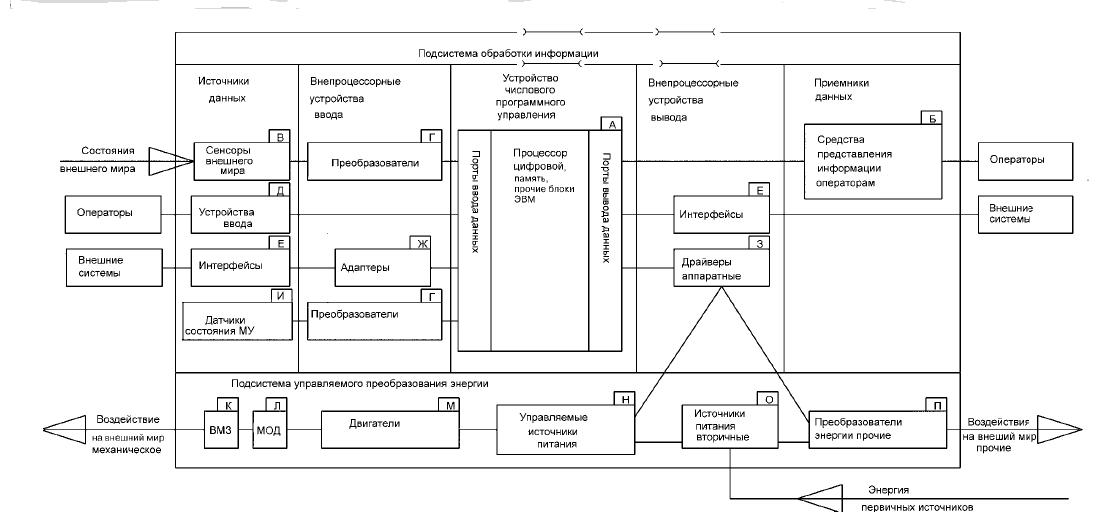
Рис.1.3.1.Типовая структурная схема мехатронного устройства
На рисунке типовой структуры использованы следующие обозначения.
А.Устройства числового программного управления (УЧПУ, контроллеры, цифровые ЭВМ и т. п.).
Б.Средства предоставления информации человеку-оператору.
В.Сенсоры внешнего мира — датчики состояния внешнего, по отношению к проектируемому изделию, мира.
Г. Преобразователи (устройства подготовки сигналов). Внепроцессорные сигналы часто нуждаются в подготовке для улучшения их качества. Качество сигнала определяется уровнем его напряжения, наличием помех, их уровнем (отношение «сигнал/шум») и типом, искажением формы сигнала и т. п.
К часто встречающимся видам подготовки относятся: усиление напряжения и/или мощности, фильтрация, исправление формы импульса, ограничение уровня, модуляция и демодуляция сигнала, средства обработки цифровых кодов и т. п.
Д.Устройства ввода данных от человека-оператора.
Е.Интерфейсы цифровые служат для обмена данными между цифровыми устройствами. Интерфейсы различаются, прежде всего, способом обмена в параллельных или последовательных кодах.
Интерфейсы параллельного обмена, или порты параллельного цифрового ввода или вывода (параллельные порты, Parallel port), — это аппаратура сопряжения, позволяющая подключить к системной шине процессора внешнее устройство путем обмена в параллельных кодах. Параллельные порты позволяют согласовывать низкую скорость работы внешнего устройства и высокую скорость работы системной шины микропроцессора. По отношению к внешнему устройству порт представляет собой обычный источник или приемник информации со стандартными цифровыми логическими уровнями (обычно ТТЛ), а по отношению к процессору — это ячейка памяти, в которую можно записывать данные. Интерфейсы последовательного обмена, или порты последовательного цифрового ввода или вывода (последовательные порты, Serial port), — это аппаратура сопряжения, позволяющая подключить к системной шине процессора внешнее устройство путем обмена в последовательных кодах, бит за битом. Последовательные порты обладают существенно меньшей скоростью обмена, чем параллельные, но возможность удаленного обмена у последовательных портов намного выше.
Ж.Адаптеры — устройства логического и аппаратного согласования одних устройств с другими.
З.Драйверы аппаратные служат для аппаратного и логического согласования входа управляемого источника питания (УИП) с цифровым выходом устройства числового программного управления (УЧПУ).
И.Датчики(сенсоры) состояний мехатронных устройств предназначены для сбора необходимой в рамках данного проекта информации о состоянии мехатронного устройства и/или его частей. Различают датчики измерители физической величины и датчики наблюдатели физической величины, рассчитывающие ее значения по другим измеренным величинам.
К.Выходное механическое звено (ВМЗ) — это одноподвижный или многоподвижный механизм (последовательной или параллельной структуры), обеспечивающий перемещение одного или нескольких рабочих органов мехатронной машины или других механизмов (звеньев). Различают манипулирующие (перемещающие) и нагрузочные (воспроизводящие требуемую зависимость между внешними силами или реакциями опор и управляемыми усилиями входных звеньев) механизмы.
Л.К механизмам обеспечения движения (МОД) можно отнести: муфты; механизмы преобразования движения (передаточные механизмы ; механизмы фиксации положения выходного звена, ограничители движения (фиксаторы, упоры, стопоры) выходного звена, тормозные устройства (управляемые ограничители). Механизмы обеспечения движения в мехатронном узле существуют всегда, но их сложность может меняться в широких пределах: от простейшего устройства сопряжения валов до сложнейших и дорогостоящих механизмов.
М.К наиболее известным двигателям, применяемым в мехатронных объектах, относятся электромеханические преобразователи электромагнитного типа (электромагнитные двигатели, коллекторные двигатели постоянного тока, асинхронные двигатели с короткозамкнутым ротором, двигатели на базе синхронных машин (вентильные, моментные, шаговые, вентильно-индукторные, магнитострикционные)); электромеханические преобразователи на базе пьезоэлектрического эффекта; электрогидро_ и электропневмоприводы. В последние годы вырос интерес к автомобильной мехатронике и появились двигатели внутреннего сгорания с микропроцессорным управлением. Резко возрос интерес к поиску новых преобразователей электрической и других типов энергии в механическую, к созданию микро и наноразмерных двигателей.
Н.Управляемые источники питания (УИП) (усилители и преобразователи энергии питания) проектируются и создаются для целенаправленного изменения энергии в нагрузке (например, в двигателе мехатронной машины).Управление механической мощностью двигателя реализуется через управление расходом энергии в цепях его питания, путем подачи на вход УИП электрических сигналов. В мехатронных машинах могут встретиться задачи управления и немеханической мощностью, например, управление мощностью электрического нагревателя. Основные функции УИП — это управление мощностью, поступающей в нагрузку УИП; реверсирование потока энергии в нагрузке; динамическое торможение двигателей; рекуперация энергии; отключение нагрузки от источника.
О.Источники питания вторичные (проектируемые вместе с изделием).
П.Преобразователи энергии питания служебного назначения.
В учебном пособии [6] предложены следующие принципы построения мехатронных модулей, устройств и объектов.
1. Наличие интеграции следующих функциональных элементов:
- выходного механического звена (ВМЗ), выполняющего внешние функции мехатронного устройства;
- двигателей выходного механического звена;
- управляемого источника питания (УИП) (усилителя/преобразователя энергии питания двигателя);
- устройства числового программного управления (УЧПУ);
- информационной системы, контролирующей состояние внешнего мира и внутренних параметров мехатронного устройства, которая может включать в себя: датчики состояния мехатронного устройства, датчики состояния внешнего мира (сенсоры очувствления), устройства ввода и вывода данных для человека-оператора, преобразователи сигналов и драйверы аппаратные, обеспечивающие логическое и аппаратное согласование сигналов, интерфейсы для ввода и вывода данных в УЧПУ.
2. Минимум преобразований информации и энергии (например, прямое цифровое управление безредукторным приводом) — принцип минимума преобразований.
3. Использование одного и того же элемента мехатронного устройства для реализации нескольких функций (например, параметры двигателя (ток, противо-ЭДС) используются для измерения его момента и скорости) — принцип совмещения функций.
4. Проектирование функций различных элементов мехатронного устройства должно осуществляться таким образом, чтобы цели служебного назначения изделия достигались совместным выполнением этих функций без их дублирования и с максимальным эффектом(принцип синергетики).
5. Объединение корпусов узлов мехатронного устройства — принцип совмещения корпусов.
6. Применение сверхплотного монтажаэлементов.
Примерами современных мехатронных объектов и устройств являются агрегаты станков, роботы различного назначения, дисководы и принтеры в компьютерах, техника военного назначения, бытовая техника и т. п. В последнее время резко возрос интерес к микро и наномехатронике. Появились термины микромехатроника и наномехатроника. Микромехатроника — это область разработки и производства изделий, содержащих сборочные единицы с размерами, лежащими в пределах 10-3...10-6 м, обеспечивающих линейные (или угловые, приведенные к линейным) перемещения в пределах 10-3...10-6 м, либо использующих микротехнологии изготовления деталей. Наномехатронике соответствует область размеров 10-6...10-9 м.
Микро и нанотехнологии при проектировании мехатронных устройств могут использоваться для решения различных задач:
создание микро и наноразмерных приводов (например, системы микро и наноперемещений на основе пьезоэлектрических и электростатических преобразователей энергии);
микро и наноразмерных преобразователей сигналов; микро и наноконтроллеров (например, квантовых компьютеров);
микромодулей энергопитания; разработки способов и средств обеспечения управляемых перемещений в микро- и нанодиапазонах (например, с применением двигателей микро и наноперемещений;
особо точных механизмов обеспечения движения; датчиков с высокой разрешающей способностью; контроллеров с разрядностью до 128 байт;
параллельных вычислений, в том числе на искусственных нейросетях, с использованием квантовых алгоритмов;
двигателей с большим диапазоном устойчивых скоростей, в том числе в микро и нанодиапазонах;
механизмов со сверхнизкими потерями на трение; подвижных опор с зазорами менее 1 мкм и т. п.);
внедрение микро и нанотехнологий изготовления узлов и деталей, например, создание напыляемых однослойных и многослойных пленок толщиной от 10-3 до 10-9 м из материалов, определяющих физико-химические свойства покрытия (защитные и оптические покрытия, пассивирующие и выравнивающие слои, сенсорные покрытия, изолирующие пленки, неорганические мембраны, пленки для электрооптики и нелинейной оптики, электрохромирование, полупроводниковые и антистатические покрытия, сверхпроводящие пленки, упрочняющие пленки и сегнетоэлектрики и др.); удаление привнесенных микрочастиц с размерами от 10-3 до 10-9 м; очистка поверхностей потоками микрочастиц с размерами от 10-3 до 10-9 м; изготовление деталей с допусками в пределах от 10-3 до 10-6 м.
Положение выходного механического звена мехатронного устройства определяется в системе координат, жестко связанной с корпусом устройства, то есть может иметь одну или несколько степеней свободы относительно корпуса. Такие устройства называют однокоординатными, двух, трех или многокоординатными.
Упрощенно можно выделить следующие поколения роботов:
К первому относятся антропоморфные манипуляторы (управляются человеком).
Ко второму поколению относятся роботы с цикловым управлением, т.е. это одношаговое релейное управление без обратных связей. Остановка привода осуществляется с помощью механического упора с концевым выключателем и демпфера на подвижной части привода С помощью таких роботов можно многократно повторять операции, которые определяются некоторым установленным алгоритмом, находящимся в памяти.
К третьему поколению относятся роботы с модифицируемой программой. Для работы можно выбирать довольно большое число алгоритмов.
В промышленных роботах основными составными частями являются манипулятор и устройство управления. Каждая из этих частей включает ряд блоков (рис.1.3.2) [2,7].
| Внешняя среда |
| ИС |
| Внутренняя диагностика |
| Чувствительные устройства |
| Устройства контроля и блокировок |
| СПУ |
| Вычислительное устройство |
| Запоминающее устройство |
| Пульт управления |
| Блок управления приводами |
| Оператор |
| Технологическое оборудование |
| Технологический процесс |
| М |
| РО |
| Р |
| УПП |
Рис.1.3.2. Cтруктура промышленного робота.
Исполнительный механизм робота с приводом и захватным устройством называют рукой манипулятора (Р). Для перемещения манипулятора (М) относительно технологического оборудования (ТО) используются устройства передвижения.
Все манипуляционные устройства характеризуются маневренностью и коэффициентом сервиса (КС), под которым понимают возможность подхода рабочего органа (РО) к заданной точке с разных направлений. КС дает представление о двигательных возможностях манипулятора, т.е о его маневренности. Маневренность манипулятора – это число степеней подвижности при фиксированном положении РО, которая определяет возможность обхода манипулятором препятствий в рабочем объеме и способность к выполнению сложных операций.
Движения М подразделяются на группы. Так, например, движения М, снабженного наиболее распространенным в роботах РО в виде устройства захвата (УЗ) бывают следующих видов:
– ориентирующие перемещения УЗ, соизмеримые с его размерами;
– транспортирующие перемещения, определяемые размерами звеньев руки и соизмеримые с размерами рабочего объема;
– координатные перемещения на расстояния, превышающие размеры ПР и размеры рабочего объема.
В состав информационной системы (ИС) входят чувствительные (сенсорные) устройства внешней среды, система внутренней диагностики и устройства контроля и блокировок. ИС обеспечивает сбор, первичную обработку и перевод в систему программного управления (СПУ) данных о функционировании механизмов робота и о состоянии внешней среды.
СПУпредназначена для формирования и выдачи управляющих воздействий исполнительным механизмам в соответствии с управляющей программой.
Под перепрограммируемыми устройствами СПУ понимают такие, которые обеспечивают изменение последовательности и (или) значений перемещений по степеням подвижности и управляющих функций на пульте управления. Это изменение управляющей программы может быть выполнено автоматически или при помощи оператора. СПУ содержит: пульт управления (ПУ), с помощью которого оператор осуществляет ввод и контроль задания; запоминающее устройство (ЗУ), в котором хранится вся необходимая информация, включая программы работ; вычислительное устройство (ВУ), реализующее алгоритм управления манипулятором; блок управления приводами (БУП) механизмов манипулятора.
Робот и технологическое оборудование включены в единый цикл работы и содержат общий пульт управления всем технологическим процессом.
Дата добавления: 2015-08-11; просмотров: 3222;