Терминология в области робототехники
Роботы, и в частности, манипуляционные роботы как частный случай мехатронной системы, состоят из следующих элементов[2,7]:
- исполнительной системы, т.е. механических рук (манипуляторов);
-устройства сбора информации о внешней среде и состоянии робота;
- устройства обработки информации;
- технических средств общения человека и робота.
В технической литературе можно встретить такое определение:
Робот - это автономно функционирующая универсальная автоматическая машина, предназначенная для воспроизведения определенных физических, двигательных и умственных функций человека, наделенная теми или иными средствами обратной связи (слухом, зрением, осязанием и т. п.), а также способностью к обучению и адаптации в процессе активного взаимодействия с окружающей средой.
В настоящее время разработан ряд нормативных документов и руководящих материалов по терминологии в робототехнике: ГОСТ 25686 - 85 "Манипуляторы, автооператоры и промышленные роботы. Термины и определения", стандарт СЭВ 5948 -87 "Роботы промышленные. Термины и определения", Технический отчет международной организации стандартизации ИСО 8379 "Манипуляционные промышленные роботы. Словарь", терминология, разработанная комиссией по проблеме "Робототехника и автоматизированное производство", "Теория робототехнических систем. Терминология".
Некоторые термины и определения из терминологии "Теория робототехнических систем. Терминология":
Робототехника - область науки и техники, связанная с созданием, исследованием и применением роботов. Робототехника охватывает вопросы проектирования, программного обеспечения, очувствления роботов, управления ими, а также роботизации промышленности и непромышленной сферы.
Робот - многофункциональная перепрограммируемая машина, для полностью или частичного автоматического выполнения двигательных функций аналогично живым организмам, а также некоторых интеллектуальных функций человека. Под "перепрограммируемостью" понимают возможность замены, коррекции или генерации управляющей программы автоматически или при помощи человека. К роботам не относятся, в частности, автооператоры, а также копирующие манипуляторы и другие машины, управляемые только человеком - оператором.
Промышленный робот (ПР) - робот, предназначенный для выполнения технологических и (или) вспомогательных операций в промышленности.
Манипуляционный робот - робот для выполнения двигательных функций, аналогичных функциям руки человека.
Роботизированный технологический комплекс (РТК) – совокупность единицы технологического оборудования, промышленного робота и средств оснащения, автономно функционирующая и осуществляющая многократные циклы (ГОСТ 26.228-85. Системы производственные гибкие, Термины и определения). Примечания:
1. РТК, предназначенные для работы в гибких производственных системах должны иметь автоматизированную переналадку и возможность встраиваться в систему.
2. В качестве технологического оборудования может быть использован промышленный робот.
3. Средствами оснащения РТК могут быть: устройства накопления, ориентации, поштучной выдачи объектов производства и другие устройства, обеспечивающие функционирование РТК.
РТК простейшего типа предназначены для выполнения одной технологической операции. Их принято называть роботизированными технологическими модулями (РТМ). Если промышленный робот в составе РТМ выполняет технологический переход, он сам выступает в роли технологического оборудования. В зависимости от вида производства применяются соответствующие названия: штамповочный модуль, окрасочный модуль и т.п.
РТК, предназначенные для выполнения нескольких технологических операций и построенные на базе одного ПР, принято называть роботизированными технологическими ячейками (РТЯ). Технологическое оборудование в РТЯ может комплектоваться по круговой, параллельной или линейной схемам. Организационным условием создания РТЯ является достаточно большое машинное вре6мя обработки изделий, в несколько раз превышающее время обслуживания оборудования роботом.
РТК, предназначенные для выполнения последовательности нескольких технологических операций, необходимых для частичного или полного изготовления изделий, и построенные на базе нескольких ПР, имеющие средства транспорта, а также устройства для хранения запасов предметов производства представляют собой роботизированную технологическую линию (РТЛ). Основным организационным отличием РТЛ является обеспечение непрерывности и ритмичности производства, сокращение длительности производственного цикла и минимизация величин цикловых заделов. РТЛ более характерны для крупносерийного и массового производства.
Отдельные РТМ, РТЯ, РТЛ, находящиеся на ограниченном участке производственной площади, могут составлять единую производственно-организационную систему - роботизированный участок. При этом качественно они не будут являться единой системой машин, а будут объединены чисто организационными связями, при этом уровень автоматизации транспортных операций остается низким.
Роботизированный производственный комплекс – это автономно действующая совокупность технологических средств производства, включающая, как минимум, один промышленный робот, выполняющий основные операции технологического процесса (сборку, сварку, окраску и т. п.), и набор вспомогательного оборудования, обеспечивающего полностью автоматический цикл выполнения технологических операций внутри комплекса и его связь с входными и выходными потоками остального производства. При этом автоматизация вспомогательных операций внутри комплекса может выполняться с помощью других ПР.
Манипулятор – устройство для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом. Манмпулятор имеет кинематическую цепь, образованную последовательным или последовательно-параллельным соединением тел, называемых кинематическими звеньями, и предназначенную для преобразования движения этих звеньев в требуемое (заданное) движение рабочего органа или схвата. При этом кинематические звенья соединяются друг с другом подвижно с помощью кинематических пар.
Кинематическая цепь, образующая манипулятор, имеет два оконечных звена: одно из них будет являться основанием – стойкой (ему присваивается нулевой номер), а другое оконечное звено оснащается схватом. Этому оконечному звену присваивается последний n-й номер, равный при последовательном соединении звеньев числу подвижных звеньев манипулятора[9,10].
Кинематическое звено – совокупность жестко соединенных друг с другом тел, входящих в состав механизма, в данном случае в состав манипулятора.
Кинематическая пара – подвижное соединение двух кинематических звеньев, допускающее их вполне определенное движение относительно друг друга.
Элементы кинематической пары – поверхности, линии или точки, по которым соприкасаются звенья, образующие данную кинематическую пару.
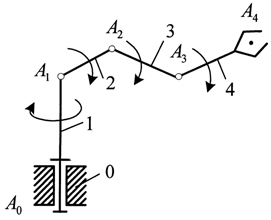
| Рис. 1.2.1. Манипулятор на основе разомкнутой цепи |
 Кинематическая цепь– это совокупность кинематических звеньев, подвижно соединенных друг с другом с помощью кинематических пар.
Кинематическая цепь– это совокупность кинематических звеньев, подвижно соединенных друг с другом с помощью кинематических пар.
Если в кинематической цепи есть кинематические звенья, входящие в одну кинематическую пару, то такая цепь называется разомкнутой, а если же каждое звено входит, как минимум, в две кинематических пары, то это замкнутая кинематическая цепь.
Манипулятор может быть образован как на основе разомкнутой кинематической цепи (рис. 1.2.1.) с последовательным соединением звеньев (антропоморфные человекоподобные роботы) и на основе замкнутой кинематической цепи (рис.1.2.2.) с последовательно-параллельным соединением звеньев (роботы с параллельной кинематикой, в частности, гексаподы на основе платформы Стюарта).
Рис. 1.2.2. Манипулятор с параллельной кинематикой
От характера кинематических пар и от их взаимного расположения в манипуляторе зависят законы преобразования движения.
Кинематические пары допускают вполне определенные движения образующих их звеньев относительно друг друга. Эта определенность достигается теми ограничениями, которые создают пары геометрией своих элементов.
Пары классифицируют по классам, номер которого равен числу ограничений (числу условий связи), накладываемых данной парой:
одно ограничение (одно условие связи) – пара I класса;
- два ограничения (два условия связи) – пара II класса;

- три ограничения (три условия связи) – пара III класса;

- четыре ограничения (четыре условия связи) – пара IV класса;
- пять ограничений (пять условий связи) – пара V класса (пары пятого класса могут быть поступательными и вращательными).
| Поступательная пара V класса |
| Вращательная пара V класса |
Важной характеристикой манипулятора является число степеней его подвижности (W), число степеней свободы.
Для определения W произвольной кинематической цепи следует использовать формулу Сомова – Малышева.
 ,
,
где pi – число кинематических пар i-го класса.
Для манипуляторов с кинематическими парами 5- го класса
 .
.
Например, для манипулятора, представленного на рисунке 6.1:
 .
.
Так как в манипуляторе с последовательной кинематикой каждому подвижному звену соответствует одна кинематическая пара пятого класса, то  . Следовательно,
. Следовательно,  или
или  , то есть число степеней подвижности в таких манипуляторах равно числу подвижных звеньев и числу кинематических пар.
, то есть число степеней подвижности в таких манипуляторах равно числу подвижных звеньев и числу кинематических пар.
В манипуляторах в основном используются одноподвижные вращательные или поступательные пары 5-го класса. Для определенности движения одного звена относительно другого в случае, если они подвижно соединены парой 5-го класса требуется задание одного перемещения. Это легко реализуется современными двигателями.
Дата добавления: 2015-08-11; просмотров: 8497;