Алгоритм фильтра выхода контроллера (СО)
Фильтр 1 порядка производит сглаженную величину CO* как
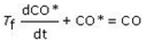
Где
CO = исходный (нефильтрованный) PID сигнал.
CO* = фильтрованный CO сигнал, посланный на конечный управляющий элемент.
Tf= константа фильтра, настроечный параметр.
Достоинства:
- CO фильтр работает с уменьшением выхода контроллера и поэтому уменьшает и флуктуации, которые вызывают износ оборудования
- CO фильтр – единственное решение, которое адресовано и пробемам измерения PV+шум, и расчёту странности коммерческих алгоритмов
- И, пожалуй, самое важное, что настройку можно успешнее провести для этой архитектуры для PI и PID алгоритма.
Изучение фильтра 1 порядка, т.е. сравнение фильтра 1 порядка с общей моделью системы 1 порядка (FOPDT) обнаруживает, что:
- Показатель (коэффициент передачи) (масштабирующий фактор) фильтра один. Поэтому сигнал CO* имеет одну и ту же единицу измерения, как сигнал CO из PID алгоритма.
- Нет времени мёртвой зоны, встроенного в фильтр. CO*, подаваемый на конечный управляющий элемент, вычисляется немедленно после того, как PID алгоритм вырабатывает исходный (нефильтрованный) PID сигнал
Степень фильтрации, или как быстро CO* подаётся вместо CO, устанавливается постоянной фильтра Tf
В практике характеристики процесса нелинейны и могут меняться со временем. Поэтому линейные модели, используемые для начальной установки (дизайна) не могут быть применимы, когда условия процесса меняются или когда процесс выполняется в другой области.
Дата добавления: 2015-08-11; просмотров: 1155;