Рекомендации по выбору закона регулирования и типа регулятора
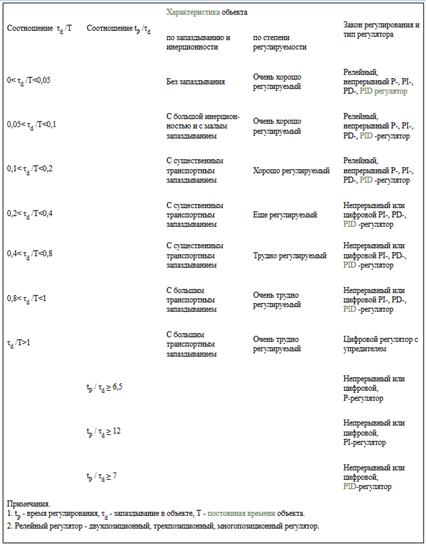
Минимально возможное время регулирования tР для различных законов регулирования и типов регуляторов при оптимальной их настройке определяется таблицей 1. Теоретически, в системе с запаздыванием, минимальное время регулирования tPMIN = 2 τd. В таблице 1 приведены рекомендации по выбору закона регулирования и типа регулятора исходя из величины отношения запаздывания τd к постоянной времени объекта Т.
Если τd /Т < 0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы.
Если 0,2 < τd /Т < 1, то должен быть выбран непрерывный или цифровой, PI-, PD-, PID-регулятор.
Если τd /Т > 1, то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях τd /Т.
Таблица 1 Выбор закона регулирования и типа регулятора по отношению τd /Т и tP /τd
Для каждого объекта управления необходимо применять регуляторы с соответствующим алгоритмом и законом регулирования. Это позволяет существенно снизить потери при функционировании объекта (расход энергии, потери продукции и пр.
Дата добавления: 2015-08-11; просмотров: 1824;