Эксперимент в замкнутом контуре
С помощью этой процедуры предполагается, что нет модели процесса. Процедура основана только на измерении. Эксперимент может быть проведен с устойчивыми и неустойчивыми процессами. Система с замкнутым контуром тестируется с P контроллером (интеграл и производная отключаются). Коэффициент усиления P контроллера увеличивают, пока система не достигнет запаса устойчивости (перейдёт в режим колебаний). Когда колебания с постоянной амплитудой и периодом устанавливаются, то можно определить период колебания Тu (критическая величина) и (критический коэффициент усиления контроллера Ku. В ходе эксперимента, при изменении уставки, можно определить статический коэффициент усиления Kp как отношение изменений ответа и уставки в стабильном состоянии.

На основании экспериментально полученных Тu и Ku Циглер и Никольс дали
следующие таблицы параметров контроллера (если критерий - quarter decay ratio):
Получить произведение c = KpKu . Его можно трактовать как максимальный (критический) коэффициент усиления разомкнутой системы и использовать для определения настроечных параметров.
Как правило, рекомендуется использовать настройки параметров Циглера-Никольса:
1. Если c = KpKu <2, то законы управления, которые могут компенсировать транспортные задержки, должны быть использованы.
2. Если c> 20, то лучшие результаты могут быть достигнуты более сложным алгоритмом
управления.
3. Если 1,5 < c <2, то PID-регулятор может быть использован, если требования к эффективности системы управления не очень строгие. Для достижения хорошей производительности настройки Циглера-Николса должны быть изменены.
4. Если c <1,5, то PI контроллер можно попробовать, если требования к эффективности системы управления не являются очень строгими. Дифференциальный режим не будет значительно использован. Другие структуры также могут быть рекомендованы.
Метод Ziegler-Nichols (Циглера Никольса) - Настройка по методу максимального коэффициента усиления. Этот способ применяется, если допустим колебательный процесс, при котором значения регулируемой величины значительно выходят за пределы задания (на рис. задание - U).
Алгоритм настройки:
1) определяется предельный коэффициент Кмах усиления при котором система переходит в колебательный режим, т.е. без интегральной и дифференциальной части (ТD=0, ТҐ =0). Вначале К=0, затем он увеличивается до тех пор, пока система переходит в колебательный режим. Управление соответствует схеме P-регулятора.
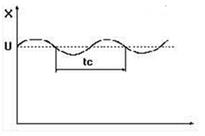
Рис. 5 Настройка по методу максимального коэффициента усиления
2) определяется период колебаний tc (см. рис. 5).
3) вычисляются коэффициенты настройки согласно следующим примерным соотношениям:
для P -регулятора К= 0.5·Kмах
для PD -регулятора К= 0.5·Кмах, TD=0.05·tc
для PI -регулятора К= 0.45·Кмах, TI = 0.8·tс
для PID -регулятора К= 0.6·Кмах, TI = 0.5·tс, TD=0.12·tc.
2. Правила оптимизации согласно Chien, Hrones и Reswick.
Правила оптимизации для систем с компенсацией (без перерегулирования). Пример дляPID- контроллера.
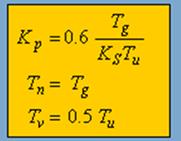
Рис. 6 Правила оптимизации для систем без перерегулирования.
Правила оптимизации для систем с компенсацией (с перерегулированием). Пример для PID- контроллера
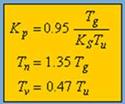
Рис. 7 Правила оптимизации для систем с перерегулированием.
Используя принципы оптимизации согласно Chein, Hrones и Reswick, возможно внести изменения, чтобы:
- установить желательный ответ контура (лучший ответ на изменение setpoint или хороший ответ на возмущения)
- задать желательную тенденцию колебания контура (с/без перерегулирования управляемой переменной).
Дата добавления: 2015-08-11; просмотров: 1178;