Р -пропорциональная составляющая (Р-закон регулирования)
Можно выбрать нужный тип регулятора, устанавливая постоянные параметры на определённое значение.
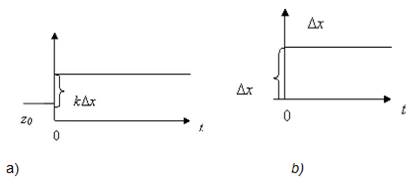
Рисунок 1. а – входное воздействие; b – Р – регулятор.
Наиболее простым и широко распространенным является такой закон регулирования, при котором входной сигнал регулятора z линейно зависит от входного Dx:
z= z0 +kDx (1)
где k – коэффициент пропорциональности, называемый коэффициентом передачи регулятора, а z0 – постоянная составляющая сигнала z.
Как видно из формулы (1), z0– это такое значение выходного сигнала регулятора, при котором рассогласование Dx на его выходе равно нулю.
Закон регулирования, выраженный формулой (1), называется пропорциональным. Сокращенно говорят, что это Р-закон регулирования, а сам регулятор с таким законом регулирования называют пропорциональным или Р-контролером.
Дата добавления: 2015-08-11; просмотров: 1154;