Движения плоскости и их свойства. Примеры движений. Классификация движений. Группа движений. Применение движений к решению задач
Движение– это преобразования фигур, при котором сохраняются расстояния между точками. Если две фигуры точно совместить друг с другом посредством движения, то эти фигуры одинаковы, равны.

Движение– это биективное преобразование φ плоскости π, при котором для любых различных точек X, Y є π выполнено соотношение XY φ(X )φ(Y).
Свойства движений:
1.Композиция φ ◦ ψ двух движений ψ, φ является движением.
Док-во: Пусть фигура F переводится движением ψ в фигуру F’, а фигура F’ переводится движением φ в фигуру F’’. Пусть при первом движении точка X фигуры F переходит в точку X’ фигуры F’ , а при втором движении точка X’ фигуры F’ переходит в точку X’’ фигуры F’’. Тогда преобразование фигуры F в фигуру F’’, при котором произвольная точка X фигуры F переходит в точку X’’ фигуры F’’, сохраняет расстояние между точками, а значит, также является движением.
Запись композиции всегда начинается с последнего движения, т.к. результатом композиции является конечный образ – он и ставится в соответствие исходному: X’’= ψ(X’) = ψ(φ (X)) = ψ ◦ φ (X)
2. Если φ – движение, то преобразование φ-1 также является движением.
Док-во: Пусть преобразование фигуры F в фигуру F’ переводит различные точки фигуры F в различные точки фигуры F’. Пусть произвольная точка X фигуры F при этом преобразовании переходит в точку X’ фигуры F’.
Преобразование фигуры F’ в фигуру F, при котором точка X’ переходит в точку X, называется преобразованием, обратным данному. Для каждого движения φ можно определить обратное ему движение, которое обозначается φ-1.
Т.о., преобразование, обратное движению, также является движением.
Очевидно, что преобразование φ-1 удовлетворяет равенствам: f ◦ f-1 = f-1 ◦ f = ε, где ε – тождественное отображение.
3. Ассоциативность композиций: Пусть φ1, φ2, φ3 – произвольные движения. Тогда φ1◦(φ2◦ φ3) = (φ1◦φ2)◦φ3.
Тот факт, что композиция движений обладает свойством ассоциативности, позволяет определить степень φ с натуральным показателем n.
Положим φ1 = φ и φn+1 = φn ◦ φ, если n ≥ 1. Таким образом, движение φn получается путём n-кратного последовательного применения движения φ.
4. Сохранение прямолинейности: Точки, лежащие на одной прямой, при движении переходят в точки, лежащие на одной прямой, и сохраняется порядок их взаимного расположения.
Это значит, что если точки A, B, C, лежащие на одной прямой (такие точки называют коллинеарными), переходят в точки A1, B1, C1, то эти точки также лежат на прямой; если точка B лежит между точками A и C, то точка B1 лежит между точками A1 и C1.
Док-во. Пусть точка B прямой AC лежит между точками A и C. Докажем, что точки A1, B1, C1 лежат на одной прямой.
Если точки A1, B1, C1 не лежат на одной прямой, то они являются вершинами некоторого треугольника A1B1C1. Поэтому A1C1 < A1B1 + B1C1.
По определению движения следует, что AC < AB + BC.
Однако по свойству измерения отрезков AC = AB + BC.
Мы пришли к противоречию. Значит, точка B1 лежит между точками A1 и C1.
Допустим, что точка A1 лежит между точками B1, и C1. Тогда A1B1 + A1C1 = B1C1, и, следовательно, AB + AC = BC. Но это противоречит равенству AB + BC = AC.
Т.о., точка A1 нележит между точками B1, и C1.
Аналогично доказывается, что точка C1 не можетлежать между точками A1 и B1. Т.к. из трёх точек A1, B1, C1 одна лежит между двумя другими, то этой точкой может быть только B1. Теорема доказана полностью.
Следствие. При движении прямая отображается на прямую, луч – на луч, отрезок – на отрезок, а треугольник – на равный ему треугольник.
Если через Х обозначить множество точек плоскости, а через φ(Х) - образ множества Х при движении φ, т.е. множество всех точек вида φ(х), где х є Х, то можно дать более корректную формулировку данного свойства:
Пусть φ – движение, А, В, С – три различные коллинеарные точки.
Тогда точки φ(А), φ(В), φ(С) также коллинеарны.
Если l – прямая, то φ(l) также прямая.
Если множество Х является лучом (отрезком, полуплоскостью), то множество φ(Х) также является лучом (отрезком, полуплоскостью).
5. При движении сохраняются углы между лучами.
Док-во. Пусть AB и AC – два луча, исходящие, из точки A, не лежащие на одной прямой. При движении эти лучи переходят в некоторые полупрямые (лучи) A1B1 и A1C1. Т.к. движение сохраняет расстояния, то треугольники ABC и A1B1C1 равны по третьему признаку равенства треугольников (если три стороны одного треугольника соответственно равны трём сторонам другого треугольника, то эти треугольники равны).Из равенства треугольников следует равенство углов BAC и B1 A1C1, что и требовалось доказать.
6. Всякое движение сохраняет сонаправленность лучей и одинаковую ориентированность флагов.
Лучи lА и lВ называются сонаправленными(одинаково ориентированными, обозначение: lА ↑↑ lВ), если один из них содержится в другом, или если они совмещаются параллельным переносом. ФлагF = (πl, lo) – это объединение полуплоскости πl и луча lo.
Точка О – начало флага, луч lo с началом в точке О – древко флага, πl – полуплоскость с границей l.
Док-во.Пусть φ – произвольное движение, lА ↑↑ lВ –сонаправленные лучи с началами в точках А и В соответственно. Введём обозначения: lА1 = φ(lА), А1 = φ(А), lВ1 = φ(lВ), В1 = φ(А).Если лучи lА и lВ лежат на одной прямой, то в силу сонаправленности один из них содержится в другом. Считая, что lА lВ , получаем φ(lА) φ(lВ), т.е. lА1 ↑↑ lВ1 (символом обозначается включение или равенство подмножества элементов множеству элементов).Если же lА , lВ лежат на разных прямых, то пусть n = (AB).Тогда существует такая полуплоскость πn, что lА, lВ πn. Отсюда φ(lА),φ(lВ) φ(πn). Поскольку φ(πn) – полуплоскость, причем ее граница содержит точки А1 и В1 , мы опять получаем, что lА , lВ сонаправлены.
Применим теперь движение φ к одинаково ориентированным флагам F = (πl,lА), G = (πm,mB).Рассмотрим случай , когда точки A и B совпадают. Если прямые l и m различны, то одинаковая ориентированность флагов означает, что либо (1) lА πm,, mА π’l, либо (2) lА π’m, mА πl. Без ограничения общности можно считать, что выполняется условие (1). Тогда φ(lА) φ(πm), φ(mА) φ(π’l). Отсюда вытекает одинаковая ориентированность флагов φ(F) и φ(G).Если же прямые l, m совпадают, то либо F = G, либо F = G’. Отсюда следует, что флаги φ(F) и φ(G) одинаково ориентированные.
Пусть теперь точки A и B различны. Обозначим через n прямую (AB). Понятно, что найдутся сонаправленные лучи nA и nB и полуплоскость πn такие, что флаг F1 = (πn, nA) сонаправлен с F, а флаг G1= (πn, nB,) сонаправлен с G. Значит φ(F) и φ(G) одинаково ориентированные.Теорема доказана.
Примеры движений:
1)параллельный перенос - такое преобразование фигуры, при котором все точки фигуры перемещаются в одном и том же направлении на одно и то же расстояние.
2)симметрия относительно прямой (осевая или зеркальная симметрия). Преобразование σ фигуры F в фигуру F’,при котором каждая её точка X переходит в точку X’, симметричную относительно данной прямой l, называется преобразованием симметрии относительно прямой l. При этом фигуры F и F’ называются симметричными относительно прямой l.
3)поворот вокруг точки. Поворотом плоскости ρ вокруг данной точки O называется такое движение, при котором каждый луч, исходящий из этой точки, поворачивается на один и тот же угол α в одном и том же направлении
4)скользящая симметрия (композиция осевой симметрии и параллельного переноса вдоль оси симметрии) – композиция движений τ ◦ σl, где σl – симметрия относительно прямой l, а τ – параллельный перенос вдоль прямой l, не являющийся тождественным отображением.
Классификация движений:
Теорема Шаля. Каждое движение первого рода является либо параллельным переносом, либо поворотом; каждое движение второго рода - либо осевая симметрия, либо скользящая симметрия.
Док-во. Пусть φ – произвольное движение первого рода. Можно считать, что φ ≠ ε. Множество I(φ) в этом случае либо пусто, либо одноэлементно. В первом случае φ – параллельный перенос, во втором – поворот.Пусть теперь φ – произвольное движение второго рода. Множество I(φ) в этом случае либо пусто, либо является прямой. Это означает, что φ либо скользящая симметрия, либо осевая симметрия. Теорема доказана.
Применение к решению задач:
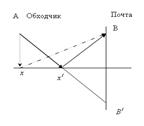
Задача1: Обходчику нужно выйти (из А) на железную дорогу (х) и дойти затем к почте (В) так, чтобы его путь был минимален.
Пунктиром обозначен произвольный путь (если точку х передвигать вдоль прямой). Если точку  осевой симметрией (
осевой симметрией (  через ось
через ось  ) перевести в точку
) перевести в точку  , то
, то  будет минимальным. Таким образом точка
будет минимальным. Таким образом точка  должна стремиться в
должна стремиться в  . Путь
. Путь  - самый короткий.
- самый короткий.
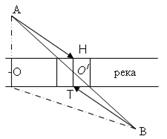
Задача 2: Пункты А и В находятся по разные стороны реки. Нужно построить мост через реку так, чтобы суммарное расстояние от пунктов А и В до моста было минимальное.
Пунктиром обозначен произвольный путь (он изменяется при движении точки О вдоль прямой  ). АВ – минимальное расстояние между А и В. Стрелками от А и В указан минимальный путь до мостов. Точка О должна стремиться к точке
). АВ – минимальное расстояние между А и В. Стрелками от А и В указан минимальный путь до мостов. Точка О должна стремиться к точке  . Путь
. Путь  к мосту от А и В минимален.
к мосту от А и В минимален.
Дата добавления: 2015-07-30; просмотров: 9696;