Понятие об устойчивости систем регулирования
|
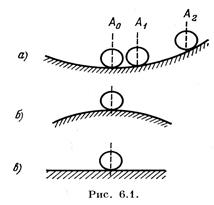
Понятие устойчивости системы регулирования связано со способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Наглядно устойчивость равновесия иллюстрируется рис. 6.1, а, на котором изображен шар, лежащий в некотором углублении. При всяком отклонении его от положения равновесия он будет стремиться возвратиться к нему точно (при отсутствии сил трения) или к некоторой конечной области, окружающей предшествующее положение равновесия (при наличии сил трения). Такое положение шара будет устойчивым.
На рис. 6.1, б изображен другой случай, когда положение шара оказывается неустойчивым.Рис. 6.1, в соответствует случаю безразличного положения равновесия.
Можно ввести понятия о невозмущенном состоянии равновесия, соответствующем точке А0 на рис. 6.1, а, и возмущенном состоянии равновесия (точка А2). После прекращения действия внешних сил шар возвратится в точку А0 или А1. Условие устойчивости здесь можно сформулировать так:система называется устойчивой, если из возмущенного состояния равновесия она перейдет в некоторую конечную область, окружающую невозмущенное состояние равновесия.
Понятие устойчивости можно распространить и на случай движения некоторой системы. Пусть ее состояние определяется независимыми координатами 
 . . . ,
. . . ,  . Заданное движение системы определяется некоторым законом изменения координат:
. Заданное движение системы определяется некоторым законом изменения координат: 
 . . . ,
. . . ,  .
.
Аналогично случаю равновесия положения заданное движение можно
назвать невозмущенным движением. Приложение внешних сил к рассматриваемойсистеме вызовет отклонение действительного движения от заданного:  ,
,  и т. д. Это движение будет возмущенным.
и т. д. Это движение будет возмущенным.
Заданное невозмущенное движение будет устойчивым, если в результате приложения внешних сил, которые затем снимаются, возмущенное движение по истечении некоторого времени войдет в заданную область: 
 .
.
Рассмотрим вопрос устойчивости более подробно. Пусть система регулирования описывается нелинейными дифференциальными уравнениями в форме Коши
 (6.1)
(6.1)
Если при  заданы начальные значения
заданы начальные значения  (i =1, 2, . . ., n) , то решение может быть представлено в виде
(i =1, 2, . . ., n) , то решение может быть представлено в виде  , где i = 1,2, . . ., п.
, где i = 1,2, . . ., п.
Пусть установившиеся процессы в системе характеризуются координатами  Введем также отклонения координат
Введем также отклонения координат  (i =1, . . ., n), характеризующие отклонения процесса от установившегося.
(i =1, . . ., n), характеризующие отклонения процесса от установившегося.
Систему уравнений (6.1) перепишем для отклонений:
 (6.2)
(6.2)
где  — некоторые нелинейные функции. Эти уравнения называются уравнениями возмущенного движения. Их тривиальные решения
— некоторые нелинейные функции. Эти уравнения называются уравнениями возмущенного движения. Их тривиальные решения  соответствуют невозмущенному движению, так как при этом
соответствуют невозмущенному движению, так как при этом  .
.
Начальные значения отклонений  носят название возмущений. Решение системы (6.2) для некоторых начальных отклонений
носят название возмущений. Решение системы (6.2) для некоторых начальных отклонений  представляет собой возмущенное движение.
представляет собой возмущенное движение.
А. М. Ляпунов [82] дал следующее определение устойчивости.
Невозмущенное движение {при ) называется устойчивым по отношению к переменным Х(, если при всяком заданном положительном числе А2, как бы мало оно ни было, можно выбрать другое положительное число  (А2) так, что для всех возмущений , удовлетворяющих условию
(А2) так, что для всех возмущений , удовлетворяющих условию
 (6.3)
(6.3)
возмущенное движение (6.2) будет для времени  удовлетворять неравенству
удовлетворять неравенству
 (6.4)
(6.4)
Здесь  — некоторые весовые коэффициенты, необходимые для уравнивания физических размерностей величин
— некоторые весовые коэффициенты, необходимые для уравнивания физических размерностей величин  .
.
Геометрическая интерпретация этого условия заключается в следующем.
В пространстве координат  построим две сферы с радиусами
построим две сферы с радиусами  и А. Система будет устойчивой, если при возмущениях, не выведших изображающую точку М
и А. Система будет устойчивой, если при возмущениях, не выведших изображающую точку М  из пределов сферы , возмущенное движение будет таково, что, начиная с некоторого времени
из пределов сферы , возмущенное движение будет таково, что, начиная с некоторого времени  , изображающая точка M
, изображающая точка M  будет в пределах сферы А.
будет в пределах сферы А.
Если с течением времени изображающая точка стремится к началу координат, т.е.
 (i = 1, 2, . . ., n).
(i = 1, 2, . . ., n).
то система асимптотически устойчива.
Несколько другое изложение этой теоремы будет дано ниже в § 16.1.
Перейдем теперь к вопросу устойчивости линейных, а точнее, линеаризованных систем регулирования.
Рассмотрим дифференциальное уравнение движения линеаризованной системы автоматического регулирования, записанное для регулируемой величины y(t) при наличии управляющего воздействия g(t) и при равенстве нулю возмущающих воздействий:
 . (6.5)
. (6.5)
Коэффициенты  и
и  представляют собой постоянные величины, а оператор
представляют собой постоянные величины, а оператор  .
.
Дифференциальное уравнение движения системы регулирования можно записать и для возмущающего воздействия. В этом случае левая часть (6.5) останется без изменения, а правая часть будет иметь иной вид. В общем виде дифференциальное уравнение, определяющее изменение регулируемой величины, может быть записано так, что в правой его части будет находиться некоторая функция времени f(t).
Характер переходных процессов в системе определяется видом левой части дифференциального уравнения (6.5). Поэтому для определения качественной картины переходных процессов является практически безразличным, записать ли исходное дифференциальное уравнение для управляющего или возмущающего воздействия.
Уравнение (6.5) может с равным успехом быть записано для ошибки регулирования х(t). При этом левая часть уравнения (6.5) полностью сохраняет свой вид.
Процесс регулирования определяется решением дифференциального уравнения как сумма двух решений — частного решения неоднородного уравнения (6.5) с правой частью и общего решения уравнения (6.5) без правой части, т. е. с правой частью, равной нулю:
 (6.6)
(6.6)
В случае  это будет установившееся значение. Первое слагаемое (6.6) называют также вынужденным решением ув(t), а второе слагаемое — переходной составляющей уп (I). Тогда формула (6.6) может быть записана в виде
это будет установившееся значение. Первое слагаемое (6.6) называют также вынужденным решением ув(t), а второе слагаемое — переходной составляющей уп (I). Тогда формула (6.6) может быть записана в виде
 (6.7)
(6.7)
Система будет называться устойчивой, если с течением времени при  переходная составляющая будет стремиться к нулю: уп (t)
переходная составляющая будет стремиться к нулю: уп (t)  0. Найдем эту составляющую из (6.5). Для этой цели необходимо решить дифференциальное уравнение без правой части
0. Найдем эту составляющую из (6.5). Для этой цели необходимо решить дифференциальное уравнение без правой части
 (6.8)
(6.8)
Общее решение ищется в виде
 .
.
Дифференцируя это выражение n раз и подставляя в (6.7), получаем после сокращения на общий множитель 

Полученное алгебраическое уравнение называется характеристическим. Корни его  будут определять характер переходного процесса в системе. Нетрудно заметить, что по своему виду левая часть (6.8) полностью совпадает с левой частью (6.5) нулю:
будут определять характер переходного процесса в системе. Нетрудно заметить, что по своему виду левая часть (6.8) полностью совпадает с левой частью (6.5) нулю:
 (6.9)
(6.9)
Однако здесь буква  означает уже не символ дифференцирования, а некоторое комплексное число, которое является решением (корнем) характеристического уравнения.
означает уже не символ дифференцирования, а некоторое комплексное число, которое является решением (корнем) характеристического уравнения.
Так как в решении характеристического уравнения содержится п корней, то переходная составляющая может быть записана в виде
 (6.10)
(6.10)
где р1 , . . ., рп — корни характеристического уравнения, С1 , . . ., Сn постоянные интегрирования, определяемые из начальных условий.
Корни характеристического уравнения определяются только видом левой части уравнения (6.5). Постоянные интегрирования определяются также и видом правой его части. Поэтому быстрота затухания и форма переходного процесса определяются как левой, так и правой частями исходного
дифференциального уравнения. Однако поскольку в понятие устойчивости системы входит только факт наличия или отсутствия затухания переходного процесса (независимо от быстроты затухания и формы переходного процесса), то устойчивость линейной системы не зависит от вида правой части дифференциального уравнения (6.5) и определяется только характеристическим уравнением (6.9).
Чтобы определить, устойчива система или нет, нет необходимости решать характеристическое уравнение и определять его корни. Выясним, какие свойства корней необходимы и достаточны для того, чтобы система была устойчивой.
Корни могут быть вещественными, комплексными и чисто мнимыми. Рассмотрим эти случаи.
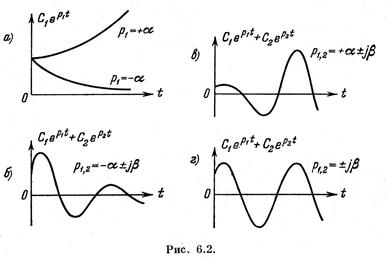
1. Вещественный корень. Пусть один из корней, например
ри является вещественным. Если он отрицательный  , то слагаемое, определяемое этим корнем в (6.10), будет представлять собой экспоненту
, то слагаемое, определяемое этим корнем в (6.10), будет представлять собой экспоненту  Очевидно, что при этот член будет затухать.
Очевидно, что при этот член будет затухать.
При  получится не затухающий, а расходящийся процесс (рис. 6.2, а).
получится не затухающий, а расходящийся процесс (рис. 6.2, а).
2. Комплексные к о р н и. Комплексные корни бывают попарно сопряженными. При отрицательной вещественной части два корня, напри
мер р1 и р2, будут иметь вид  . В этом случае слагаемые, определяемые этими корнями в уравнении (6.8), могут быть представлены в виде
. В этом случае слагаемые, определяемые этими корнями в уравнении (6.8), могут быть представлены в виде

где  и
и  — новые постоянные интегрирования.
— новые постоянные интегрирования.
Нетрудно видеть, что в этом случае получаются затухающие колебания, причем мнимая часть корня  представляет собой круговую частоту затухающих колебаний, а
представляет собой круговую частоту затухающих колебаний, а  — показатель затухания, определяющий затухание огибающей к кривой переходного процесса (рис. 6.2, б).
— показатель затухания, определяющий затухание огибающей к кривой переходного процесса (рис. 6.2, б).
При положительной вещественной части колебания будут не затухающими, а расходящимися (рис. 6.2, в).
|
3. Ч и с т о мнимые корни. В этом случае  и
и  Слагаемое, определяемое этими корнями в (6.10), будет представлять собой незатухающие колебания, т. е. колебания с постоянной амплитудой:
Слагаемое, определяемое этими корнями в (6.10), будет представлять собой незатухающие колебания, т. е. колебания с постоянной амплитудой:

Такой процесс изображен на рис. 6.2, г.
Следовательно, для затухания переходного процесса необходимо, чтобы вещественные части корней были отрицательными. Это относится как
к вещественным, так и к комплексным корням. Если хотя бы один корень характеристического уравнения будет иметь положительную вещественную часть, то переходный процесс в целом будет расходиться, т. е. система окажется неустойчивой.
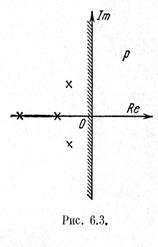
Корни характеристического уравнения можно представить в виде точек на комплексной плоскости величины p (рис. 6.3).
Для устойчивости линейной системы, необходимо и достаточно, чтобы все корни лежали слева от мнимой оси плоскости корней. Если хотя бы один корень окажется справа от мнимой оси, то система будет неустойчивой. Таким образом, мнимая ось представляет собой граничную линию в плоскости корней, за которую не должны переходить корни характеристического уравнения. Вся левая полуплоскость представляет собой при этом область устойчивости.
Превращение устойчивой системы в неустойчивую произойдет в том случае, если хотя бы один вещественный или пара комплексных корней перейдет из левой полуплоскости в правую. Границей перехода будет так называемая граница устойчивости системы. Система будет находиться на границе устойчивости при наличии:
1) нулевого корня;
2) пары чисто мнимых корней;
3) бесконечного корня.
Во всех трех случаях предполагается, что все остальные корни имеют отрицательные вещественные части.
В первом случае вещественный корень попадает на границу устойчивости (ось мнимых) в начале координат, т. е. выполняется условие  = 0. Это означает, что в характеристическом уравнении (6.9) будет отсутствовать свободный член ап = 0. Дифференциальное уравнение (6.5) в этом случае может быть записано в виде
= 0. Это означает, что в характеристическом уравнении (6.9) будет отсутствовать свободный член ап = 0. Дифференциальное уравнение (6.5) в этом случае может быть записано в виде

и система будет устойчивой не относительно регулируемой величины y, а относительно ее скорости изменения ру. Величина же отклонения регулируемой величины может принимать произвольные значения. Такую систему называют нейтрально устойчивой, имея в виду ее безразличие к значению самой регулируемой величины.
На границе устойчивости второго типа, которая называется колебательной границей устойчивости, два корня попадают на ось мнимых. Система в этом случае будет иметь незатухающие гармонические колебания с постоянной амплитудой
(рис. 6.2, г).
Наконец, вещественный корень может попасть из левой полуплоскости в правую, проходя через бесконечность. В этом случае .соответствующее слагаемое  в выражении (6.10) обращается в нуль, что соответствует понижению порядка дифференциального уравнения на единицу. Это будет при a0 =0. Граница устойчивости третьего типа встречается сравнительно редко, и в дальнейшем будут рассматриваться практически только первый и второй типы границы устойчивости.
в выражении (6.10) обращается в нуль, что соответствует понижению порядка дифференциального уравнения на единицу. Это будет при a0 =0. Граница устойчивости третьего типа встречается сравнительно редко, и в дальнейшем будут рассматриваться практически только первый и второй типы границы устойчивости.
Как было сказано выше, ни одна реальная система автоматического регулирования не является строго линейной. Линейные характеристики звеньев и линейные дифференциальные уравнения получаются путем линеаризации реальных характеристик и уравнений. При разложении в ряд Тейлора, удерживались линейные члены и отбрасывались члены высших порядков, которые для малых отклонений считались пренебрежимо малыми.
Обоснование законности такой линеаризации содержится в теоремах Ляпунова.
1. Если характеристическое уравнение линеаризованной системы имеет
все корни с отрицательными вещественными частями, то реальная система
будет также устойчивой, т. е. малые нелинейные члены не могут в этом случае нарушить устойчивость системы.
2. Если характеристическое уравнение линеаризованной системы имеет
хотя бы один корень с положительной вещественной частью, то реальная
система будет также неустойчивой, т. е. малые нелинейные члены не могут
сделать ее устойчивой.
3. При наличии нулевых и чисто мнимых корней поведение реальной
системы не всегда даже качественно определяется ее линеаризованными
уравнениями. При этом даже малые нелинейные члены могут коренным
образом изменить вид переходного процесса, сделав систему устойчивой
или неустойчивой.
Опираясь в своих линейных расчетах на эти теоремы Ляпунова, необходимо всегда иметь в виду, что они, во-первых, относятся к исследованию устойчивости в малом, т. е. в малой окрестности данного состояния равновесия, когда кривая СВ мало отличается от прямой СD (см. рис. 3.2) и, соответственно, отбрасываемые в формуле члены малы. Во-вторых, все это относится только к описанному выше способу линеаризации уравнений - разложению нелинейных функций в степенные ряды, что геометрически соответствует замене кривой отрезком касательной, а не к какому-либо другому способу линеаризации.
К сильно выраженным нелинейностям на больших участках, в том числе и к нелинейностям релейного типа, эти, теоремы, вообще говоря, неприменимы. Для исследования устойчивости нелинейных систем общего вида имеются другие теоремы Ляпунова, так называемый прямой метод Ляпунова или, по старой терминологии, «вторая метода» Ляпунова, которые будут изложены ниже, в главе 17.
Далеко не всегда бывает удобно вычислять корни характеристического уравнения. Поэтому желательно иметь такие критерии, с помощью которых можно было бы судить об устойчивости системы непосредственно по коэффициентам характеристического уравнения, без вычисления корней. Эти критерии называются критериями устойчивости.
Покажем, что необходимым (но не достаточным) условием устойчивости системы является положительность всех коэффициентов характеристического уравнения. Это значит, что при положительности всех коэффициентов система может быть устойчивой, но не исключена возможность неустойчивости системы. Если же не все коэффициенты характеристического уравнения положительны, то система наверняка неустойчива и никаких дополнительных исследований устойчивости не требуется.
Заметим, что вместо того, чтобы быть положительными, все коэффициенты характеристического уравнения могут быть отрицательными. Умножая
все члены характеристического уравнения на минус единицу, можно сделать
все коэффициенты положительными, т. е. в этом случае выполнить указанное
выше требование.
Для доказательства сформулированного необходимого условия устойчивости будем вначале предполагать, что все корни вещественные. Представим левую часть характеристического уравнения, (6.9) в виде произведения

где р1, . . ., рп — корни характеристического уравнения. При этом будем считать, что а0 >0. Это всегда можно выполнить умножением уравнения на минус единицу.
В устойчивой системе все корни должны быть отрицательными, т. е.  и т. д. При этом получим
и т. д. При этом получим

Если теперь раскрыть скобки и вернуться к уравнению вида (6.9), то все коэффициенты уравнения получатся положительными, так как, перемножая и складывая положительные величины  и т. д., нельзя получить отрицательных величин.
и т. д., нельзя получить отрицательных величин.
При наличии в решении характеристического уравнения комплексных
корней с отрицательной вещественной частью, например 
результат не изменится, так как множители, соответствующие этим корням,
будут иметь вид

Очевидно, что появление такого множителя не может изменить вывод о положительности всех коэффициентов характеристического уравнения.
Имея в виду рассмотренное необходимое условие устойчивости, далее будем всегда предполагать, что все коэффициенты характеристического уравнения положительны.
Необходимое условие устойчивости становится достаточным только для уравнений первого и второго порядков. В этом случае система будет! устойчивой при положительности всех коэффициентов характеристического" уравнения, в чем нетрудно убедиться прямым нахождением корней уравнения.
Дата добавления: 2015-07-14; просмотров: 1250;