Обнаружение радиолокационных сигналов 4 страница
Оптимизация оценки сводится при этом к обеспечению минимума среднего
риска.
Оценивая степень ошибки по величине разности а*-а= ε, в качестве
функции стоимости достаточно задать функцию r(ε) одной переменной. На
рис. 2 .31 изображены возможные графики стоимости r(ε ) в функции величины ошибки ε. В первом случае (рис. 2.38, а) средний риск соответствует среднему
квадрату ошибки, а оптимизация измерений сво-
дится к достижению минимума среднеквадратич-
ной ошибки. В случае выбора функции стоимости
r(ε)==|ε| (рис. 2.38, б) оптимизация сведется к
обеспечению минимума среднего модуля ошибки.
В случае выбора ступенчатой функции стоимости
(рис. 2.38, в), то обеспечивается условие минимума
вероятности превышения модулем ошибки некото-
рой установленной величины ε0.
 Рис.2.38.Возможные функ ции стоимости ошибки
Рис.2.38.Возможные функ ции стоимости ошибки
|
Наиболее употребительным является использование квадратичной стоимости ошибки

Таким образом, в зависимости от выбора разновидности функции стоимости ошибки устанавливаются различные критерии оптимизации измерения.
2.2.2. Простой оптимальный измеритель
Оптимальная оценка измеряемого параметра а* соответствует «центру тяжести» распределения послеопытной плотности вероятности  или
или  для произвольно принятой реализации: дискретной Гили непрерывной у(t). Если послеопытное распределение симметрично или близко к симметричному и на оси симметрии имеет единственное максимальное значение, то его «центр тяжести» совпадает с этим значением. Таким образом, в качестве оптимальной оценки а* может быть принята оценка максимума послеопытной плотности вероятности. Эти условия выполнимы в том случае, если сигнал хорошо выделяется над шумом.
для произвольно принятой реализации: дискретной Гили непрерывной у(t). Если послеопытное распределение симметрично или близко к симметричному и на оси симметрии имеет единственное максимальное значение, то его «центр тяжести» совпадает с этим значением. Таким образом, в качестве оптимальной оценки а* может быть принята оценка максимума послеопытной плотности вероятности. Эти условия выполнимы в том случае, если сигнал хорошо выделяется над шумом.
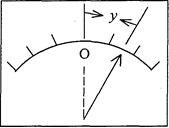
Рассмотрим методику отыскания оптимальных оценок на простом примере оптимизации измерения. Обратимся к стрелочному прибору (рис. 2.39), считая, что его показание у складывается из помехи п и сигнала х, т.е.
|
| Рис. 2.39. Простой измеритель |
| у= п + х . В данном случае х == а является параметром, подлежащем оценке. Условимся, что доопытное распределение Р(а) параметра а является равномерным в интервале а1 < а < а2 (рис. 2.40, а). |
 Рис. 2.40. Кривые лотностей вероятности: а - доопытной р(а); б - измеренного значения р(у\ а) в функции истинного значения а;
в - послеопытной р(а | у) Рис. 2.40. Кривые лотностей вероятности: а - доопытной р(а); б - измеренного значения р(у\ а) в функции истинного значения а;
в - послеопытной р(а | у)
|
 Рис. 2.41. Кривые доопытной и послеопытной плотностей вероятности:
а - для слабой помехи; б - для сильной помехи Рис. 2.41. Кривые доопытной и послеопытной плотностей вероятности:
а - для слабой помехи; б - для сильной помехи
|
Распределение помехи полагаем подчиненным центрированному нормальному
закону, так что
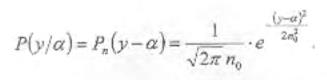
Соответствующая кривая в функции неизвестного параметра а изображена на
рис. 2.40, б. Она является гауссовой кривой с дисперсией  и средним значением у. С точностью до множителя пропорциональности послеопытная плотность вероятности Р(а/у) как функция параметра а определяется произведением Р(а)*Р{у/а), а множитель пропорциональности нормирует площадь под кривой (рис. 2.40, в) к единице. Кривая Р(а/у) учитывает, таким образом, результат измерения у, так и доопытные данные о значениях измеряемой величины а и помехи п.
и средним значением у. С точностью до множителя пропорциональности послеопытная плотность вероятности Р(а/у) как функция параметра а определяется произведением Р(а)*Р{у/а), а множитель пропорциональности нормирует площадь под кривой (рис. 2.40, в) к единице. Кривая Р(а/у) учитывает, таким образом, результат измерения у, так и доопытные данные о значениях измеряемой величины а и помехи п.
Существенное влияние на послеопытное распределение оказывает уро-
вень помех, что иллюстрируется на рис. 2.41 для двух крайних случаев:
1) помеха слабая: <<а2-а1 - ход кривой послеопытного распределения
определяется результатом измерения у и дисперсией п\;
2) помеха сильная: >> а2 – а1 - кривая послеопытного распределения не от-
личается от кривой доопытного, поскольку результат измерения недостове-
рен.
В первом случае оптимальная оценка соответствует отсчету  дисперсия ошибки
дисперсия ошибки
равна .
Во втором случае оценка определяется «центром тяжести» доопытного
распределения (а1 + а2 )/2, а дисперсия ошибки не отличается от доопытной 
Таким образом, методика отыскания оптимальных оценок  сводится:
сводится:
1) к пределению функций измеряемого параметра а, пропорциональных его
послеопытной плотности вероятности;
2) к определению "центра тяжести" или абсциссы максимума для кривых этих
функций.
2.2.5. Измерение времени запаздывания
При определении координат воздушных объектов в любой радиолокаци-
онной системе используются определенные закономерности распространения
радиоволн. При распространении радиоволн в свободном пространстве, кото-
рое является однородным, изотропным и недиспергирующим скорость распро-
странения постоянна (с≈3*108 м/с), не зависит от поляризации волн и частоты
колебаний. При этом зондирующий и отраженный сигналы распространяются
по прямолинейной траектории и без искажений своей формы. Время запазды-
вания отраженного сигнала относительно зондирующего (рис. 2.42) для разне-
сенной системы определяется соотношением
 где r1,r2 — расстояние от объекта до пере- дающего и приемного пунктов. Для совмещенной системы
где r1,r2 — расстояние от объекта до пере- дающего и приемного пунктов. Для совмещенной системы

|
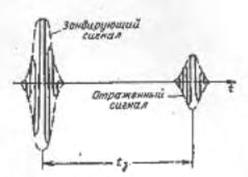 Рис. 2.42. Пояснение запаздывания отраженного сигнала Рис. 2.42. Пояснение запаздывания отраженного сигнала
|
В последнем случае дальность до воздушного объекта

|
Следовательно, по времени запаздывания отраженного сигнала относительно излученного (зондирующего) определяется координата дальности.
На рис. 2.43, а изображены элементы оптимального приемника обнаружения когерентного сигнала со случайной начальной фазой, состоящего из оптимального

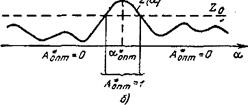
Рис. 2.43. Общие элементы схемы оптимального
обнаружителя-измерителя (а) и напряжение на
выходе детектора (б); показан порог обнаружения
фильтра и линейного детектора. Такая схема вырабатывает модульные значения корреляционного интеграла в функции измеряемого параметра а;
Выходное напряжение представлено на рис. 2.43, б. Решение о наличии
объекта  принимается для всех областей а, где превышается порог. Оптимальная оценка наибольшего правдоподобия
принимается для всех областей а, где превышается порог. Оптимальная оценка наибольшего правдоподобия  соответствует максимуму выходного напряжения. Оценка отличается от истинного значения измеряемого параметра. Возможные ошибки определяются послеопытной плотностью вероятности
соответствует максимуму выходного напряжения. Оценка отличается от истинного значения измеряемого параметра. Возможные ошибки определяются послеопытной плотностью вероятности
Соответствующее построение изображено на рис. 2.44. Здесь нанесена

Рис. 2.44, Пояснение преобразования вершины кривой 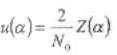
в основную часть кривой 
кривая  , по форме напоминающей быстро нарастающую экспоненту. На этом же рисунке изображен график напряжения на выходе оптимального
, по форме напоминающей быстро нарастающую экспоненту. На этом же рисунке изображен график напряжения на выходе оптимального
фильтра после линейного детектора  . Это напряжение содержит пик сигнала и боковые выбросы помехи. Вследствие экспоненциального характера кривой имеет место «отсечка» шумов и пик сигнала резко подчеркивается в кривой послеопытного распределения.
. Это напряжение содержит пик сигнала и боковые выбросы помехи. Вследствие экспоненциального характера кривой имеет место «отсечка» шумов и пик сигнала резко подчеркивается в кривой послеопытного распределения.
При конечной эффективной ширине спектра сигнала  и достаточно интенсивном сигнале послеопытное распределение измеряемого времени запаздывания подчиняется нормальному закону, а стандартное отклонение
и достаточно интенсивном сигнале послеопытное распределение измеряемого времени запаздывания подчиняется нормальному закону, а стандартное отклонение

обратно пропорционально параметру обнаружения q и эффективной ширине
спектра .
На рис. 2.45 изображены графики, аналогичные тем, что изображены на
рис. 2.44, но для значительно более слабого сигнала. Выбросы сигнала и помех
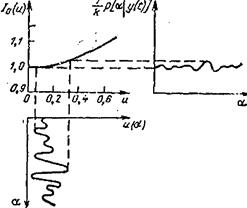
Рис. 2.45. Пояснение сглаживания выбросов
кривой  при q < 1
при q < 1
сглаживаются и послеопытная плотность вероятности оказывается пропорциональной только доопытной.
Наилучшим для измерения времени запаздывания является оптимальный
фильтр обнаружения. Время запаздывания определяется по максимуму сигнала
на выходе фильтра с помощью специальной электронно-лучевой трубки, что
требует участия оператора. Автоматически время  может быть определено
может быть определено
путем предварительного дифференцирования сигнала на выходе оптимального
фильтра и определения момента прохождения этого сигнала через нуль.
На рис. 2.46 изображена структурная схема оптимального измерителя
временного положения сигнала.
Схема измерителя включает: оптимальный фильтр ОФ; дифференцирующее
устройство ДУ; устройство А, вырабатывающее короткие положительные импульсы в моменты прохождения продифференцированного сигнала через нуль
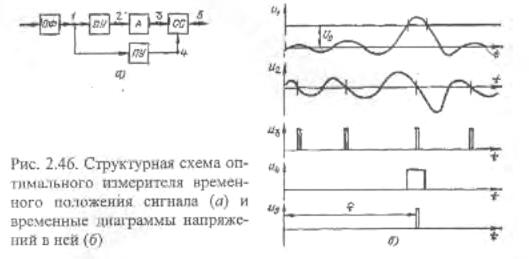
сверху вниз; схему совпадения СС; пороговое устройство ПУ. Пороговое устройство вместе с оптимальным фильтром образуют оптимальный обнаружитель, импульс обнаружения которого поступает на схему совпадения и открывает ее. При таком построении измерителя на выход схемы совпадения не проходят сигналы, соответствующие максимумам шумовых выбросов (рис.2.46, б).
2.2.4. Оптимальная форма сигнала для измерения
временного положения
Потенциальная точность измерения временного положения сигнала зависит от эффективной полосы Пэ его спектра  . Эффективная ширина
. Эффективная ширина
спектра будет тем больше, чем неравномернее распределены ее спектральные
составляющие: на малых частотах должны быть небольшие плотности спектра,
а на высоких частотах - большие. Наибольшего значения она достигает при сосредоточении всего спектра на краях занимаемого участка спектра, т.е. на частотах  . В рассматриваемом случае наилучшим является спектр
. В рассматриваемом случае наилучшим является спектр

где В - постоянная.
Следовательно, оптимальной будет синусоида с частотой Ртах, спектр которой имеет дискретный характер. Такой сигнал применяется в фазовом дальномере, который, обеспечивая наивысшую точность измерения дальности, не обладает
разрешающей способностью по дальности. Тот же результат получается, если
S(f) рассматривать как спектр огибающей сигнала.
Таким образом, достижение высокой точности измерения дальности еще
не гарантирует получение высокой разрешающей способности по дальности.
Для получения высокой разрешающей способности по дальности необходимо,
чтобы максимум автокорреляционной функции сигнала был единственным или
хотя бы единственно большим, что исключает дискретную структуру спектра
сигнала (необходим спектр сплошной). Поэтому требование высокой разрешающей способности является более широким, чем требование высокой точности измерения, ибо радиосистема, обеспечивающая высокую разрешающую
способность, всегда обладает и высокой точностью измерения.
2.2.5. Методы измерения дальности и разности дальностей
В однородной среде, как уже отмечалось, радиоволны распространяются
прямолинейно и с постоянной скоростью С. Поэтому время распространения
радиоволн между передатчиком и приемником, расстояние между которыми К,

В однопозиционной РЛС время распространения радиоволн от РЛС до
отражающего объекта и обратно — время запаздывания сигнала
где R — расстояние между РЛС и объектом. При работе с ответчиком
где  — время задержки сигнала в ответчике.
— время задержки сигнала в ответчике.
Как видим, определение дальности сводится к измерению времени запаздывания Т принимаемого сигнала относительно излученного и вычислению К в соответствии с какой-либо из приведенных формул (в зависимости от типа радиосистемы).
Если принимаемое при определении дальности  значение скорости распространения радиоволн с или измеренное время запаздывания τ будут отличаться от истинных, то возникает дальномерная ошибка. Полный дифференциал дальности
значение скорости распространения радиоволн с или измеренное время запаздывания τ будут отличаться от истинных, то возникает дальномерная ошибка. Полный дифференциал дальности  . Заменив дифференциалы
. Заменив дифференциалы
конечными приращениями, получим абсолютное значение дальномерной
ошибки

где ∆с — абсолютная ошибка определения скорости распространения радиоволн;
∆τ — абсолютная погрешность измерения времени запаздывания сигнала.
Рассматриваемые ошибки имеют как систематическую, так и случайную
составляющую. В силу независимости ошибок следует, что среднеквадратическая ошибка далънометрии

где — среднеквадратические ошибки определения скорости распространения радиоволн и времени запаздывания соответственно.
— среднеквадратические ошибки определения скорости распространения радиоволн и времени запаздывания соответственно.
Первая составляющая дальномерной ошибки  обусловлена прежде всего нестабильностью скорости распространения радиоволн в неоднородной атмосфере. Вторая составляющая
обусловлена прежде всего нестабильностью скорости распространения радиоволн в неоднородной атмосфере. Вторая составляющая  зависит от вида излучаемого сигнала, характера и интенсивности помех, а также от технической реализации дальномера.
зависит от вида излучаемого сигнала, характера и интенсивности помех, а также от технической реализации дальномера.
В зависимости от вида сигнала и его параметра, содержащего информацию о дальности, различают три основных метода радиодальнометрии: импульсный (или временной), фазовый и частотный. Эти методы используют как
в радиолокации, так и в радионавигации. В радионавигации, кроме того, широко применяют методы разностно-дальномерных радиоизмерений, позволяющие
определять разность расстояний от подвижного объекта до радионавигационных точек. Разность расстояний находят либо путем измерения временного интервала между сигналами, принимаемыми от двух РНТ, либо путем измерения разности фаз принимаемых когерентных колебаний. В соответствии с этим в разностно-дальномерных системах для местоопределения подвижного объекта используют импульсный разностно-дальномерный, фазовый разностнодальномерный, а также комбинированный импульсно-фазовый методы радиоизмерений.
Импульсный метод. Импульсный метод радиодальнометрии основан на
непосредственном измерении времени запаздывания принимаемого радиоим-
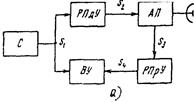
пульса относительно излученного. Работа импульсного дальномера (рис. 2.47, а)
поясняется эпюрами на рис.2.47,6. Передатчик, запускаемый импульсами S1
синхронизатора С, генерирует радиоимпульсы длительностью τи с периодом
повторения Тп. Антенный
 Структурная схема (а) и
временные диаграммы напряжений (б) импульсного дальномера
Структурная схема (а) и
временные диаграммы напряжений (б) импульсного дальномера
|
|
переключатель АП
подсоединяет антенну к передатчику ТПдУ на время до начала генерации
следующего импульса. На
вход приемника поступают ослабленные зондирующие импульсы и отраженный от объекта сигнал, запаздывающий на время т относительно зондирующего импульса (Sз). Если в качестве выходного устройства ВУ используется электронно-лучевая трубка, то к ее вертикально отклоняющим пластинам подводится напряжение с выхода приемника (S4), а к горизонтально отклоняющим —
пилообразное напряжение развертки (S5). Передатчик и схема формирования
разверток запускаются одновременно импульсами S1, поэтому одновременно с
излучением радиоимпульса начинается горизонтальное перемещение светяще-
гося пятна по экрану трубки со скоростью развертки υр. Расстояние, на которое
сместится пятно к моменту прихода отраженного импульса,

где М = 2υр/с — масштаб развертки. Измерив это расстояние с помощью
масштабных меток на развертке, определяют дальность К.
На точность импульсных радиодальномеров значительное влияние оказывают аппаратурные погрешности. Они вызываются: несовпадением начала
развертки с началом зондирующего импульса, т. е. неточностью синхронизации; непостоянством скорости развертки и ее несоответствием шкале индикатора; неточностью масштабной шкалы; неточностью визуальной индикации;
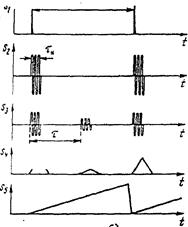
Рис. 2.48. Структурная схема (а) и диаграммы (б) цифрового съема дальности
запаздыванием сигнала в цепях дальномера. Перечисленные факторы приводят
к возникновению систематических погрешностей измерения дальности, которые могут быть частично скомпенсированы при калибровке дальномера. Однако из-за неконтролируемых изменений условий работы радиодальномера указанные причины вызывают появление и случайных погрешностей, которые устранить нельзя.
Для автоматизации процесса измерений и уменьшения аппаратурных погрешностей применяют цифровую индикацию (рис. 2.48). Импульс синхронизатора с помощью триггера Т открывает схему И, а принимаемый сигнал (импульс цели) закрывает ее. В течение времени Т счетные импульсы, следующие с частотой  , поступают на счетчик, который отсчитывает их
, поступают на счетчик, который отсчитывает их  . В результате получаем дальность
. В результате получаем дальность  . Дискретность отсчета дальности
. Дискретность отсчета дальности  определяет ошибку цифровой индикации. Полагая, что любые значения случайной погрешности
определяет ошибку цифровой индикации. Полагая, что любые значения случайной погрешности  (рис. 3.2,6) на отрезке Тс рав новероятны, находим ее дисперсию
(рис. 3.2,6) на отрезке Тс рав новероятны, находим ее дисперсию 
Следовательно, среднеквадратическая ошибка цифровой индикации
дальности

При импульсном методе дальнометрии могут возникать значительные ошибки, если не выполняется условие однозначного измерения дальности. Это условие требует, чтобы принимаемые сигналы поступали в приемник до начала следующего зондирующего импульса, т. е. максимальное время запаздывания τmax не должно превышать периода повторения импульсов Тп:
 ,
,
где Rmax — максимальная дальность объекта. В противном случае при R > сТп/2 появляется дальномерная ошибка, кратная сТп/2. Условие (7) позволяет выбрать период повторения импульсов для обеспечения однозначного измерения дальности. При заданном значении Тп это условие ограничивает максимальную дальность объектов, при которой дальнометрия еще является однозначной. Отметим, что существуют и другие возможности обеспечения однозначного измерения дальности, в частности с помощью вобуляции (шатания) частоты повторения импульсов.
Основными достоинствами импульсной дальнометрии являются: возможность развязки передающего и приемного каналов с помощью антенного переключателя, позволяющая строить РЛС с одной антенной, простота разрешения объектов по дальности и удобство измерения дальности многих объектов. Недостатки: необходимость использования больших импульсных мощностей передатчиков, невозможность измерения малых дальностей из-за наличия «мертвой» зоны, которая определяется длительностью излучаемых импульсов и временем протекания переходных процессов в антенном переключателе.
Трудности использования импульсного метода дальнометрии в радионавигации связаны с обеспечением синхронизации между передающим и приемным устройствами РНС. Если антенна передающего устройства излучает в некоторый момент времени to импульсный сигнал, то он поступает в приемник, находящийся на расстоянии R, в момент времени t0+τ. Для определения дальности R по времени запаздывания импульса нужно знать начало отсчета t0, т. е. нужно обеспечить точную синхронизацию передающего и приемного устройств. Для этого используют высокостабильные генераторы (эталоны времени), один из которых запускает передатчик, а другой фиксирует начало отсчета в приемоиндикаторе. Возникающая из-за нестабильности генераторов ошибка синхронизации приводит к дальномерной ошибке, которая с течением времени может возрастать. Если предположить, что частоты двух одинаковых генераторов «уходят» в разные стороны, то к моменту времени Т после начала работы радионавигационной системы погрешность измерения дальности ΔR = 2cνT, где ν – относительная нестабильность частоты генератора. Например, при ν=10-9 через 1 ч после включения аппаратуры дальномерная ошибка будет равна 2160 м.
Необходимость в высокостабильных эталонах времени отпадает, если дальность определяется активной системой с активным ответом. В такой системе работа устройств синхронизируется по сигналам ответчика. Однако при этом возникают свои трудности. Если дальность определяется на борту ЛА, то там же должен быть установлен запросчик, содержащий наряду с приемником и передатчик. Это существенно увеличивает массу и размеры бортовой аппаратуры и, кроме того, уменьшает ее помехозащищенность.
Импульсный разностно-дальномерный метод. Трудности, связанные с реализацией импульсного дальномерного метода в радионавигации, привели к широкому использованию разностно-дальномерного метода, при котором не требуются высокостабильные эталоны времени, а также передатчик на движущемся объекте. Принцип действия импульсной разностно-дальномерной системы состоит в следующем.
Ведущая радиостанция, расположенная в фиксированной точке А, в момент времени t0 излучает импульсный сигнал, который принимается ведомой радиостанцией в фиксированной точке В в момент времени t0 + d/c, где d — расстояние между точками А и В (база). Ведомая станция с некоторой заранее выбранной задержкой t3 излучает импульс, отступающий в приемоиндикатор подвижного объекта в точке М в момент t0 + d/c +t3 +R2/c. Кроме того, в точку М поступает импульс ведущей станции в момент to + R1/c . Приемоиндикатор измеряет временной интервал между принимаемыми импульсами ведущей и ведомой станций:
 ,
,
который не зависит от начала отсчета t0. Поэтому для синхронизации работы станций эталонов времени не требуется. Задержка t3 имеет постоянную t и переменную tп (кодовую) составляющие: t3 = tп + tK. Постоянная задержка tп зависит от размеров базы и вводится для устранения неоднозначности определения Т и для различения импульсов ведущей и ведомой станций в приемоиндикаторе. Кодовая задержка повышает помехозащищенность РНС, а также затрудняет использование радионавигационной информации абонентами, не заключившими договор с владельцами системы. Так как задержка t3 и длина базы d известны, то, измерив временной интервал τ, можно найти разность дальностей R2-R1.
Для определения местоположения объекта необходима, по крайней мере, еще одна ведомая станция, расположенная так, чтобы линии положения (гиперболы) двух пар станций пересекались. Синхронизация работы ведомых станций осуществляется по сигналам ведущей станции.
Фазовый метод.Фазовый метод радиодальнометрии основан на измерении разности фаз излучаемых и принимаемых колебаний. Генератор масштабной частоты ГМЧ (рис. 2.49) модулирует по амплитуде колебания генератора высокой частоты ГВЧ, которые излучаются в пространство. На фазометр Ф с ГМЧ поступают колебания  и сигнал с выхода приемника, который без учета шумов можно записать в виде
и сигнал с выхода приемника, который без учета шумов можно записать в виде  , где ωм - масштабная частота; φ0— начальная фаза; τ — время запаздывания сигнала; φот — фазовый сдвиг, возникающий при отражении радиоволн от объекта; φд — фазовый сдвиг сигнала в цепях дальномера. Разность фаз сигналов s1 и s2:
, где ωм - масштабная частота; φ0— начальная фаза; τ — время запаздывания сигнала; φот — фазовый сдвиг, возникающий при отражении радиоволн от объекта; φд — фазовый сдвиг сигнала в цепях дальномера. Разность фаз сигналов s1 и s2:  . Поэтому время запаздывания
. Поэтому время запаздывания  и, следовательно, дальность до объекта
и, следовательно, дальность до объекта
 .
.
Таким образом, если предварительно определить сдвиг фаз φот и φд, то, измерив разность фаз φр, можно найти дальность. Приведенное выражение справедливо и при работе с ответчиком. В этом случае под φот следует понимать фазовый сдвиг сигнала в цепях ответчика. Абсолютная погрешность измерения дальности
Дата добавления: 2015-06-22; просмотров: 2362;