Обнаружение радиолокационных сигналов 3 страница
Модель 1 соответствует случаям, когда совместная функция распределения входного сигнала обнаружителя при отсутствии сигнала известна, а совместная функция распределения смеси сигнала с шумом — неизвестна.
Модель 2 соответствует случаям, когда обе выше названные функции распределения неизвестны, но имеется выборка данных, о которой известно, что она имеет распределение шума. Эта выборка называется выборкой чистого шума.
Модель 3. Кней относятся обнаружители с k-выборкой, когда неизвестны распределения, указанные в модели 1 и отсутствует выборка чистого шума. Эта модель характерна для радиолокационных обнаружителей, так как большинство обзорных РЛС обладают большим числом элементов разрешения по дальности, по допплеровской частоте и т.д.
Для того, чтобы класс распределений, в пределах которого процедура обнаружения не зависит от вида распределения, был как можно шире, необходимо переходить к процедурам рангового наблюдения. Иначе говоря, компоненты наблюдений или последовательностей наблюдений ранжируются в порядке их величин и обнаружение осуществляется на основе некоторой функции их рангов.
В ранговых обнаружителях предусматривается обязательный переход от обычного выборочного вектор-столбца (выборочного вектора)  к ранговому вектор-столбцу (ранговому вектору)
к ранговому вектор-столбцу (ранговому вектору)

Переход от выборочного вектора осуществляется путем использования знаковых алгоритмов

Элементы знакового вектора имеют всего два возможных значения: +1, если

 Элементами рангового вектора являются ранги элементов выборочного вектора
Элементами рангового вектора являются ранги элементов выборочного вектора  Рангом элемента
Рангом элемента  называется общее число элементов вектора, включая элемент
называется общее число элементов вектора, включая элемент  , не превышающих величины Для определения ранга элемент сопоставляется
, не превышающих величины Для определения ранга элемент сопоставляется
со всеми элементами вектора Y, в том числе с самим собой. Если элементу не превышает элемента  , величина
, величина

принимает значение 1, в противном случае она обращается в нуль. Ранг /-го элемента вектора в (30) определяется поэтому как сумма выражений (31) для  Например, для выборочного вектора [953] ранговым является вектор [321] т. Поясним такой переход на примере второго элемента:
Например, для выборочного вектора [953] ранговым является вектор [321] т. Поясним такой переход на примере второго элемента:

Число возможных комбинаций элементов т-элементного рангового вектора определяется числом перестановок т! целых чисел  что определяет большую информативность комбинаций рангового вектора.
что определяет большую информативность комбинаций рангового вектора.
Ранговый алгоритм обнаружения сводится к сопоставлению ранговой статистики с некоторым порогом  для принятия решения об обнаружении или необнаружении сигнала. Простейшей и наиболее употребительной ранговой статистикой является линейная по отношению к ранговому вектору и к ожидаемому сигналу статистика Вилкоксона
для принятия решения об обнаружении или необнаружении сигнала. Простейшей и наиболее употребительной ранговой статистикой является линейная по отношению к ранговому вектору и к ожидаемому сигналу статистика Вилкоксона

Если указанная сумма превысит порог, принимается решение об обнаружении.
Одним из возможных вариантов обнаружителя по критерию ранговой суммы для РЛС с  элементами разрешения может быть следующий.
элементами разрешения может быть следующий.
Зона обнаружения РЛС разбивается на отдельные дискреты по дальности и азимуту. Обозначим соответствующие элементы дальности через  а азимута через
а азимута через  Компоненты
Компоненты  для
для  импульса ранжируются так, чтобы получить ранговый вектор
импульса ранжируются так, чтобы получить ранговый вектор  - ранг компоненты
- ранг компоненты  . После общего числа п импульсов формируется
. После общего числа п импульсов формируется  сумм вида
сумм вида

Если  превысит установленный порог, вырабатывается решение об обнаружении сигнала.
превысит установленный порог, вырабатывается решение об обнаружении сигнала.
Упрощенным вариантом обнаружителя по критерию ранговой суммы является обнаружитель с квантованием рангов (с ранговым квантованием - РК), который работает следующим образом. Вместо ранжирования данных, получаемых от каждого импульса, ^ наибольших значений из  заменяются единицами, а остальные значения - нулями. Эти единицы и нули суммируются по отдельности для каждого элемента разрешения, и если при этом пре-
заменяются единицами, а остальные значения - нулями. Эти единицы и нули суммируются по отдельности для каждого элемента разрешения, и если при этом пре-
 вышается порог, то принимается решение, что в данном элементе сигнал присутствует.
вышается порог, то принимается решение, что в данном элементе сигнал присутствует.
Ни одна из описанных процедур не является оптимальной и, следовательно, вероятностные характеристики обнаружения ухудшаются. На рис. 2.28 изображена зависимость вероятности обнаружения от отношения сигнал/шум для различных алгоритмов обнаружения. На рисунке характеристики соответствуют следующим критериям:
НП - оптимальный критерий Неймана-Пирсона;
РС - критерий ранговой суммы;
РК - критерий с ранговым квантованием;
ао — среднее число ложных тревог на каждые п импульсов.
Рассмотренные выше обнаружители относятся к обнаружителям с фиксированным объемом выборки. Существуют и обнаружители последовательного типа, алгоритм работы которых базируется на вычислении отношения -правдоподобия на основе рангов наблюдений. Для вычисления отношения правдоподобия необходимо принять в качестве исходных данных некоторые совместные функции распределения для случаев, когда присутствует только шум или смесь сигнала и шума.
Ранговые обнаружители обладают следующими свойствами:
1. Большая информативность комбинаций рангового вектора.
2. Любое монотонное неубывающее преобразование элементов выборочного вектора не изменяет рангового вектора.
3. Ранговый обнаружитель обеспечивает постоянное значение условной вероятности ложной тревоги.
4. Ранговые обнаружители не реагируют на одновременное изменение уровней сигнала и помехи, что расширяет динамический диапазон обработки.
5. Ранговые алгоритмы инерционны: переход к рангам невозможен без запоминания всей выборки.
2.1.10. Стабилизация уровня ложных тревог
Вероятность возникновения ложной тревоги является одной из важнейших характеристик радиотехнической системы (системы обнаружения, обработки и т.д.). Обнаружение сигнала на фоне собственных шумов приемника состоит в фиксации факта превышения этим сигналом заданного порогового уровня, называемого порогом обнаружения. Указанный порог задается в соответствии с интенсивностью шумов приемного тракта и допустимой вероятностью ложных тревог  Вероятность ложных тревог может быть определена следующим образом:
Вероятность ложных тревог может быть определена следующим образом:
Под ложной тревогой понимается факт превышения порога обнаружения выбросами шума (помехами). Числовой мерой вероятности  является среднее (в статистическом смысле) число таких превышений на достаточно большом, но фиксированном временном интервале наблюдения процесса
является среднее (в статистическом смысле) число таких превышений на достаточно большом, но фиксированном временном интервале наблюдения процесса 

Небольшое изменение нормированного порога  приводит к значительным изменениям вероятности ложной тревоги. Так, увеличение
приводит к значительным изменениям вероятности ложной тревоги. Так, увеличение  лишь на 1дБ (1,12 раз) приводит к уменьшению вероятности
лишь на 1дБ (1,12 раз) приводит к уменьшению вероятности  в 10 раз. Любая нестабильность порога или изменение уровня шума на выходе приемника нежелательны.
в 10 раз. Любая нестабильность порога или изменение уровня шума на выходе приемника нежелательны.
Для стабилизации уровня ложных тревог необходимо обеспечить постоянство значения нормированного порога  . Это достигается оценкой текущего значения
. Это достигается оценкой текущего значения  и подстройкой порога
и подстройкой порога  Оценку значения
Оценку значения  можно получить либо усреднением по времени шумового напряжения после амплитудного детектирования, либо подсчетом числа выбросов этого напряжения за фиксированный пороговый уровень в течение определенного отрезка времени. В последнем случае интенсивность потока возникновения ложных тревог определяется следующим образом
можно получить либо усреднением по времени шумового напряжения после амплитудного детектирования, либо подсчетом числа выбросов этого напряжения за фиксированный пороговый уровень в течение определенного отрезка времени. В последнем случае интенсивность потока возникновения ложных тревог определяется следующим образом
Вероятность возникновения  ложных тревог за время
ложных тревог за время  определяется формулой Пуассона:
определяется формулой Пуассона:
а среднее количество ложных отметок за обзор

В обоих случаях требуется достаточно много времени для получения надежной оценки 
Большинство средств радиолокации работает в условиях, когда внутренний шум приемных устройств не является определяющим. Более существенными оказываются отражения сигналов от местных предметов, грозовых облаков, излучения промышленных объектов и соседних радиотехнических систем, а также преднамеренные помехи. В этих условиях в силу быстро изменяющегося во времени помехового фона и необходимости автоматической обработки сигналов особое значение приобретает проблема обеспечения стабильности уровня ложной тревоги в каждом элементе разрешения пространства. Нестабильность
вероятностей ложных тревог приводит к перегрузке вычислительных средств вторичной обработки, неустойчивому сопровождению воздушных объектов и появлению ложных траекторий.
Использование системы временного регулирования усиления (ВАРУ) позволяет регулировать лишь средние значения пассивных помех в зависимости от дальности до объектов. Системы инерционных автоматических регулировок усиления (ИАРУ) и шумовых автоматических регулировок усиления (ШАРУ) инерционны и фиксируют уровень помехового фона лишь в среднем. Усилители с нелинейными амплитудными характеристиками исключают значительные выбросы сигналов, в определенной степени способствуют стабилизации уровня ложных тревог, однако полностью не решают эту задачу, поскольку их главное назначение состоит в расширении динамического диапазона при минимальных амплитудно-фазовых искажениях полезного сигнала.
Отмеченное означает, что фиксирование уровня ложных тревог в приемном тракте является самостоятельной задачей. Эта задача решается с помощью схем автоматического регулирования порога обнаружения. Смысл работы этой схемы поясняется с помощью устройства, упрощенная структурная схема которого изображена на рис. 2.29.
 Сигнал, поступающий на обнаружитель, одновременно подается на блок оценки вероятности ложной тревоги. Получаемая оценка
Сигнал, поступающий на обнаружитель, одновременно подается на блок оценки вероятности ложной тревоги. Получаемая оценка  сравнивается с пороговым уровнем
сравнивается с пороговым уровнем  и вырабатывается такое напряжение регулирования, при котором оценка
и вырабатывается такое напряжение регулирования, при котором оценка  остается постоянной величиной. В средствах радиолокации кругового обзора с целью повышения быстродействия схемы и качества стабилизации вероятности ложной тревоги в зависимости от ориентации диаграммы направленно-
остается постоянной величиной. В средствах радиолокации кругового обзора с целью повышения быстродействия схемы и качества стабилизации вероятности ложной тревоги в зависимости от ориентации диаграммы направленно-
сти и временной задержки относительно излученного импульса с блока памяти могут подаваться оценки  , полученные на предыдущем периоде обзора.
, полученные на предыдущем периоде обзора.
При неизвестной интенсивности помехи нельзя установить уровень порога, обеспечивающего заданное качество обнаружения сигнала. Один из путей оптимизации обработки - организация ее на основе измерения и учета уровня помехи. Оценка уровня помехи может быть реализована по принципу максимума правдоподобия. Оценивание облегчается, если выборка помехи классифицированная — на нее не наложен сигнал.
Мерой интенсивности мгновенных значений помехи можно считать мощность, выделяемую ею на единичном сопротивлении в полосе частот  и равную
и равную

Значение оценки параметра  определится как
определится как
Адаптация к интенсивности помех может быть реализована в «скользящем окне» при линейном детектировании. При этом используются отсчеты помехи, предшествующие обнаруживаемому сигналу, и следующие за ним с совокупным сглаживанием всех этих отсчетов. Структурная схема такой обработки изображена на рис. 2.30.
Принятые в полосе частот  продетектированные колебания проходят линию задержки на время отводами. Сигнальное напряжение, снимаемое со среднего отвода, задержано дополнительно на
продетектированные колебания проходят линию задержки на время отводами. Сигнальное напряжение, снимаемое со среднего отвода, задержано дополнительно на  Его амплитуду делят на усредненную амплитуду напряжения помехи. В момент максимума сигнала его амплитуда к амплитуде шума не добавляется: сглаживаются только амплитуды шума до и после максимума сигнала.
Его амплитуду делят на усредненную амплитуду напряжения помехи. В момент максимума сигнала его амплитуда к амплитуде шума не добавляется: сглаживаются только амплитуды шума до и после максимума сигнала.
 Совокупное сглаживание в «окне»
Совокупное сглаживание в «окне»  повышает точность измерения, а значит и качество адаптации к стационарным помехам. Если же
повышает точность измерения, а значит и качество адаптации к стационарным помехам. Если же  сглаживание оказывается недостаточным. Возрастают ошибки определения порогового уровня. С другой стороны, удлинение «окна» нежелательно по двум причинам. Это, во-первых, может нарушить адаптацию при нестационарности помехи. Уровень порога, во-вторых, неоправданно повышается при попадании в расширенное окно сигналов, отраженных более чем от одной цели.
сглаживание оказывается недостаточным. Возрастают ошибки определения порогового уровня. С другой стороны, удлинение «окна» нежелательно по двум причинам. Это, во-первых, может нарушить адаптацию при нестационарности помехи. Уровень порога, во-вторых, неоправданно повышается при попадании в расширенное окно сигналов, отраженных более чем от одной цели.
При оценивании уровня шума в окрестностях сигнала от некоторого воздушного объекта интенсивные отражения от других объектов, попадающие в расширенное «окно», действуют как импульсные помехи. Влияние последних ослабляется при ранговой обработке. Переход к рангам иногда используют только для оценивания дисперсии шумовой помехи в условиях многоцелевых ситуаций и выставления после этого уровня порога в аналоговом тракте обработки.
Наиболее часто оценка мощности помех осуществляется путем усреднения мощности помех по элементам дальности, что дает известные преимущества по быстродействию системы адаптации. Общая идея такой оценки и стабилизации уровня ложной тревоги при обнаружении показана на рис. 2.31.
Изображенная на рис. 2.31 система осуществляет нормировку статистики квадрата входной реализации  (мощности), полученного с помощью квадратичного детектора, к уровню средней мощности помех
(мощности), полученного с помощью квадратичного детектора, к уровню средней мощности помех  , Результирующая величина
, Результирующая величина  сигнала всегда нормирована и не зависит от уровня помех.
сигнала всегда нормирована и не зависит от уровня помех.
В последнее время осуществлены многочисленные разработки обнаружителей движущихся целей, учитывающие негауссовость помехи, наличие одновременных отражений от гидрометеоров и поверхности и т.д. Примером может служить адаптивная система со стабилизацией уровня ложных тревог, структура которой изображена на рис. 2.32.
Регистр сдвига РС1 записывает уровень отраженных сигналов и помех в ячейки дальности с последующим усреднением значений сигналов ячеек в районе, прилегающем к ячейке с целью. Порог Т1 формируется умножением среднего значения уровня помехи на коэффициенты К2 и К3. Величина К2 извлекается из постоянного запоминающего устройства на основании сигнала счетчика ложной тревоги на регистре РС2, который функционирует следующим образом. Умножением на коэффициент К1 формируется порог T2 для амплитудного ком-
паратора АК2. На второй вход компаратора подается сигнал с ячейки РС1, в которой заведомо имеется только сигнал помехи. При превышении помехой порога Т2 формируется единица, при непревышении - нуль, которые записываются в регистр РС2, а затем считываются сумматором. Величина К3 выбирается из условия обеспечения заданной вероятности ложной тревоги при обнаружении на фоне шума. Порог Т\ вводится в амплитудный компаратор АК1, где осуществляется обнаружение сигнала цели со средней ячейки РС1.
Стабилизация уровня ложных тревог (СУЛТ) реализуется специальными устройствами, один из вариантов которых приводится ниже.
Результатом работы устройства СУЛТ является формирование адаптивного порога обнаружения в соответствии с выражением
Величина  , определенная экспериментально, задается распайкой специальной группы контактов для формирования кода порога, общего для всех каналов обработки.
, определенная экспериментально, задается распайкой специальной группы контактов для формирования кода порога, общего для всех каналов обработки.
Для определения среднего уровня шума  в устройстве СУЛТ формируется скользящее в пределах рабочей дальности окно анализа протяженностью 16 ДД, разделенное на две части по 8 ДД (рис. 2.33).
в устройстве СУЛТ формируется скользящее в пределах рабочей дальности окно анализа протяженностью 16 ДД, разделенное на две части по 8 ДД (рис. 2.33).
Окно анализа (расположенное симметрично относительно дискрет  где
где  последовательно перемещается по всей рабочей дальности. Для любого текущего положения окна анализа производится суммирование значений шума в пределах этого окна и деление результата на 16.
последовательно перемещается по всей рабочей дальности. Для любого текущего положения окна анализа производится суммирование значений шума в пределах этого окна и деление результата на 16.
Полученное таким образом значение  используется далее для определения адаптивного порога
используется далее для определения адаптивного порога  (рис. 2.34).
(рис. 2.34).
Организация скользящего окна обеспечивается использованием двух ОЗУ емкостью по 8 восьмиразрядных слов каждое.
Временное запаздывание информации, накопленной ОЗУ2 по отношению к информации ОЗУ1, на время, соответствующее 4 ДД, создается регистровой линией задержки. Информация, накопленная каждым запоминающим устройством, непрерывно обновляется путем замены старой на вновь поступающую, что создает эффект движения окна анализа. Данные, хранящиеся в каждом ОЗУ, суммируются с последующим их объединением и отбрасыванием четырех младших разрядов, что эквивалентно делению на 16. Полученное таким образом значение  обновляется по мере движения окна анализа через время, соответствующее 8 ДД.
обновляется по мере движения окна анализа через время, соответствующее 8 ДД.
В регистре в течение всего текущего периода зондирования хранится значении  полученное на предыдущем зондировании при
полученное на предыдущем зондировании при  . Компаратор 1 сравнивает вновь полученное значение
. Компаратор 1 сравнивает вновь полученное значение  с хранящимся в регистре
с хранящимся в регистре
и при  (что может иметь место при работе автоматических регулировок усиления приемника, например, ВАРУ) подключает к перемножению код
(что может иметь место при работе автоматических регулировок усиления приемника, например, ВАРУ) подключает к перемножению код  .
.
Сформированный в перемножителе порог  поступает на компаратор 2,
поступает на компаратор 2,
куда поступает цифровой сигнал с регистровой линии задержки. В случае превышения сигналом формируется выходной сигнал обнаружение СУЛТ,
имеющий дополнительную задержку 10 ДД.
В момент прихода следующего импульса запуска регистр фиксирует значение полученное в последнем положении окна анализа при на рассмотренном периоде зондирования.
Еще одним примером устройства автоматической регулировки уровня
ложных тревог является следующее (рис. 2.35)

Рис. 2.35. Стабилизатор уровня ложных тревог
Согласующее устройство обеспечивает согласование динамических диапазонов входных сигналов и тракта обработки. Порог срабатывания компаратора  изначально может быть установлен произвольно.
изначально может быть установлен произвольно.
Выходное напряжение компаратора представляет собой импульсы, длительность которых соответствует длительности сигналов на уровне срабатывания компаратора. Схема формирования выходного сигнала и буферный усилитель обеспечивают формирование импульсных последовательностей с требуемыми параметрами. Выходное напряжение с буферного усилителя поступает в цепь формирования опорного напряжения компаратора . Эта цепь включает ключ, пиковый детектор, интегратор. Ключ обеспечивает прохождение сигналов на пиковый детектор во время действия импульса рабочей дистанции, расположенного в конце дистанции и длительностью τ=100-200 мкс. Пиковый детектор преобразует последовательность импульсов в пульсирующее напряжение, которое сглаживается интегратором. Выходное напряжение интегратора ограничивается сверху для исключения возможности формирования чрезмерно высокого порога.
2.2. Измерение параметров радиолокационных сигналов
2.2.1. Качественные показатели и критерии оптимальности
измерения параметров радиолокационных сигналов
В результате обнаружения устанавливаются факты наличия или отсутствия объектов в определенных областях воздушного пространства. В результате измерения должны выдаваться возможно более точные оценки дальности, радиальной скорости, угловой координаты в предположении, что наличие объекта достоверно.
В зависимости от условий локации измеряемый параметр считают случайной величиной, неизменной в течение времени приема отраженного сигнала, либо случайной величиной, изменяющейся в течение этого времени (скачкообразно или непрерывно) в соответствии с заданной статистикой движения объекта. Рассмотрим вначале первый случай.
В результате проведенного измерения должна быть дана оценка а* каждого измеряемого параметра а. Показателем качества измерения является статистически усредненная величина ошибки 8 == а*-а измерения параметра. Чем меньше величина ошибки, тем выше качество измерения.
Ошибки измерений делятся на грубые промахи, систематические и случайные ошибки. Если приняты меры для исключения систематических ошибок и грубых промахов, ошибки измерений сводятся к случайным. Случайные ошибки обусловлены действием помех на входе приемника, флюктуациями сигнала, а иногда случайным поведением самой системы измерений.
Качественными показателями измерений одномерной случайной величины являются: среднеквадратичная ошибка, вероятная (срединная) ошибка, математическое ожидание, дисперсия, средний риск ошибки и др. При измерении многомерных величин вводятся корреляционные моменты ошибок, учитывающие взаимосвязь ошибок измерения отдельных случайных величин. Остановимся подробнее на качественных показателях измерения одномерных величин.
Для произвольного закона распределения случайных ошибок Р(ε) средне-
квадратичная ошибка измерения определяется из соотношения
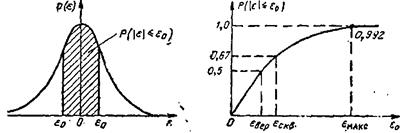
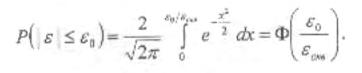
Рис. 2.36. К расчету вероятности Рис. 2.37. Кривая вероятности

В случае наиболее распространенного центрированного нормального за-
кона распределения случайных ошибок (рис. 2.37) среднеквадратичная ошибка
полностью характеризует другие виды ошибок - вероятную и максимальную. В
этом случае вероятность выполнения условия  - некоторое произвольно выбранное значение ε, будет
- некоторое произвольно выбранное значение ε, будет
Вероятная (срединная) ошибка εвер. соответствует такому значению
 ., при котором заштрихованная площадь на рис. 2.36 составляет полови-
., при котором заштрихованная площадь на рис. 2.36 составляет полови-
ну всей площади под кривой Р{ε). В этом случае

Таким образом, вероятная ошибка
В качестве максимальной ошибки б макс. обычно принимают ошибку, вероятность превышения которой по модулю составляет 0,8%. Для нормального закона

Интервал  вокруг оценки является доверительным, причем
вокруг оценки является доверительным, причем
вероятность выхода истинного значения величины за пределы доверительного
интервала составляет в данном случае 0,8%.
Математическое ожидание ошибки М{ε} отлично от нуля, когда действует источник систематической ошибки (наряду с источником случайных). Оценку а* в этом случае называют смещенной. В случае центрированного распределения ошибок, когда М{ε}=0, оценку называют несмещенной.
Дисперсия ошибок определяется выражением

В случае несмещенной оценки

В качестве обобщенного критерия качества измерения вводится средний
риск ошибок измерения. Для этого рассмотрим совокупность ситуаций совме-
щения случайного значения параметра а и случайной оценки а*. Для каждой из
ситуаций введем совместную плотность вероятности Р{а*,а). Каждой ситуации
совмещения поставим в соответствие некоторую стоимость ошибки r{а*,а) в
зависимости от ее важности. Тогда критерием качества оценки а* является средняя стоимость (средний риск) ошибки измерения
Дата добавления: 2015-06-22; просмотров: 4868;