Обнаружение радиолокационных сигналов 7 страница
Разрешающая способность РЛС по дальности численно характеризуется минимальным расстоянием между двумя целями, имеющими одинаковые угловые координаты (расположенными в радиальном относительно РЛС направлении), при котором еще возможно раздельное наблюдение этих целей.

|
На рис. 1.6.1,апоказаны две точечные цели с одинаковыми угловыми координатами. Отметки целей для идеализированного случая сигналов прямоугольной формы и неискажающего приемно-индикаторного тракта изображены на рис. 1.6.1,6. При сближении целей две отметки принимают вид двугорбой кривой, которая при интервале между целями Δt3 ≤ τи становится одногорбой. Примем в качестве условия разрешения двух целей наличие впадины между ними, т. е. когда отметка еще является двугорбой. Так как Δt3 = tз2 – tз2 = 2(D2 –D1)/ с, то условие разрешения состоит в том, чтобы (D2 –D1) > сτи/2. Отсюда разрешающая способность по дальности, которую в данном случае можно условно назвать идеальной (так как не учитывается влияние приемника и инди-
|
катора), равна δDид = τи/2.
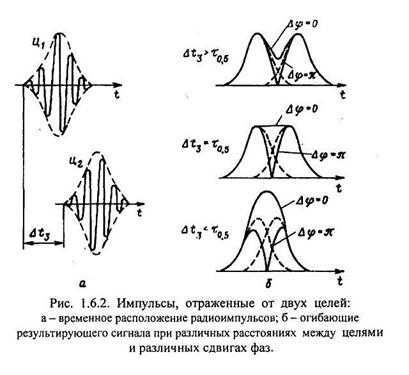
На рис. 1.6.2. показан случай, когда форма сигналов, отраженных от двух близко расположенных целей, отличается от прямоугольной. Высокочастотные колебания этих сигналов накладываются одно на другое. Всегда возможно случайное из-
менение расстояния между целями по крайней мере от 0 до λ/4 (например, при λ =10 см для этого потребуется, чтобы расстояние изменилось всего лишь на 2,5 см). Это соответствует случайному изменению разности фаз от Δφ = 0 до Δφ = π, т. е. фактически импульсы, отраженные от двух целей, при соответствующем времени наблюдения, являются некогерентными.
На рис. 1.6.2,6изображены огибающие результирующего сигнала для двух крайних случаев сдвига фаз Δφ = 0 и Δφ = π при трех значениях временного интервала между целями Δt3. При Δt3 > τ0.5, где τ0..5 — длительность импульса на уровне 0,5 от максимальной амплитуды, огибающая суммарного сигнала при любой разности фаз является двугорбой. При Δt3 < τ0.5 огибающая в зависимости от разности фаз может быть двугорбой или одногорбой, как для одиночной цели. Наконец, пересечение на уровне 0,5 от максимальной амплитуды, когда At3 = то,5, соответствует граничному случаю, так как при Δφ = 0 двугорбая кривая только начинает исчезать. Дальнейшее сближение целей приводит к все увеличивающейся вероятности ошибочного решения о количестве целей. Отсюда в соответствии с критерием разрешения Релея можно принять
δDид = сτ0,5/2 (1.6.2)
Условность такого определения разрешающей способности вытекает, например, из того, что по характеру флуктуации отметки цели на экране индикатора (особенно с линейной разверткой) оператор даже при Δt3 < τ0,5, может сделать вывод о наличии групповой цели, т. е. фактическая разрешающая способность будет выше чем сτ0,5/2.
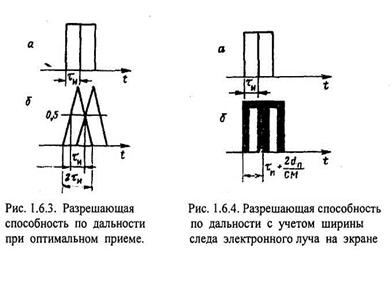
Идеальная разрешающая способность [формулы (1.6.1) и (1.6.2)] является фактически потенциальной δDпот, т. е. предельно достижимой. Это можно пояснить путем анализа разрешающей способности в случае оптимальной обработки сигнала (с помощью согласованного фильтра). Если зондирующие импульсы имеют прямоугольную форму с длительностью τи, то на выходе оптимального приемника (согласованного фильтра) образуются треугольные импульсы с длительностью основания 2τи (см. п. 4.3.1). Как видно из рис. 1.6.3, если огибающие импульсов на входе приемника соприкасаются (рис. 1.6.3,а), то на выходе
они пересекаются на уровне 0,5 (рис. 1.6.3,6) и разрешающая способность фактически определяется формулой (1.6.1), т. е. оптимальный приемник не ухудшает разрешающей способности. Поэтому в общем случае

(при непрямоугольной форме импульсов принимают τи = т0,5).
|
Таким образом, повышение разрешающей способности по дальности связано с необходимостью сокращения длительности импульсов. Это можно расценивать как расширение спектра сигнала. Так, для прямоугольного радиоимпульса
длительностью τи ширина спектра по нулям главного лепестка диаграммы направленности Δfc = 2/τи, откуда после подстановки в (1.6.3) получим

Эта закономерность, как будет видно из дальнейшего, имеет общий характер: для повышения разрешающей способности по дальности всегда требуется расширение спектра сигнала.
Реальная разрешающая способность по дальности может оказаться гораздо хуже потенциальной. В РЛС с визуальным индикатором существенное влияние оказывает ширина следа электронного луча на экране ЭЛТ. На рис. 1.6.4 показано два импульса на границе их разделения без учета (рис. 1.6.4,а) и с учетом (рис. 1.6.4,6) толщины следа. Толщина следа определяется диаметром сфокусированного пятна на экране ЭЛТ dn. Согласно (1.1.4) этому соответствует
дальность dn/M, или временной интервал 2dп/cM. В данном случае разрешающая способность по дальности, как видно из рис. 1.6.5,6, равна

где δDпот — потенциальная разрешающая способность, определяемая по формуле (1.6.3), a δDэ - разрешающая способность экрана.
Разрешающая способность экрана на основании формул (1.1.4) и (1.3.1) равна

где кэ = 1шк/dэ — коэффициент использования диаметра экрана (для индикатора с линейной разверткой (типа А) кэ ≈0,8, для ИКО кэ< 0,5).
2.3.3. Разрешающая способность по углу
Разрешающая способность по угловой координате (направлению) численно характеризуется минимальным углом (по азимуту или углу места) между направлениями на две равноудаленные относительно РЛС цели, при котором еще возможно их раздельное наблюдение.

|
Понятие разрешающей способности выясним на примере РЛС кругового обзора. Две равноудаленные цели с близкими азимутами при вращении антенны (рис. 1.6.6,а) создают на входе приемника, как и следует из п. 1.6.1, две перекрывающиеся пачки импульсов (рис. 1.6.6,6). Совпадающие импульсы этих пачек образуются вследствие облучения целей одним и тем же зондирующим импульсом.
Предположим, как и в предыдущем случае, что происходит случайное изменение
расстояния до целей не меньше, чем на λ/4, т. е. рассматриваемые пачки импульсов некогерентны. Тогда задача разделения сводится к уже рассмотренной для двух сигналов со случайными фазами, пересекающихся на определенном уровне. Отличие лишь в том, что сигналы имеют вид не одиночных импульсов, а пачки импульсов. Здесь сохраняется в силе анализ, проведенный на рис. 1.6.2 применительно к огибающим пачек. Разделение целей можно считать еще возможным, когда огибающие пересекаются на уровне 0,5 от максимальной амплитуды.
Так как огибающая пачки согласно формуле (1.4.4) соответствует диаграмме направленности по мощности, то пересечение пачек на уровне 0,5 означает угловой сдвиг целей на ширину диаграммы направленности по точкам половинной мощности θ0.5. Таким образом, потенциальная разрешающая способность по азимуту

Для повышения потенциальной разрешающей способности по углу требуется, таким образом, сужение диаграммы направленности антенны, что при заданных размерах антенны связано с укорочением длины волны.
Разрешающая способность заметно ухудшается за счет влияния ЭЛТ и
равна

|

|

|
Из рис. 1.6.7 следует, что за счет конечного
диаметра пятна dп размеры отметки цели возрастают на величину dп. Поэтому к ранее найденной величине потенциальной разрешающей способности (1.6.8) добавляется угловая ширина диаметра пятна
δβэ = dп/r, (1.6.10)
где г — радиус соответствующей отметки на экране.
Для ИКО характерна зависимость разрешающей способности экрана от положения отметки цели относительно центра экрана. По мере приближения отметки к центру экрана разрешающая способность по углу ухудшается. Это иллюстрируется изменением углового размера пятна на рис. 1.6.7.
Указанный недостаток ИКО устраняется при переходе к индикатору, азимут и дальности (ИАД) с прямоугольным растром, в котором длина отметки цели в азимутальном направлении постоянна (см. рис. 1.3.8,а).
При этом разрешающая способность экрана

где Мβ = 1шказ/βшк — азимутальный масштаб (1шказ — длина шкалы азимута; βшк — просматриваемый азимут).
Для повышения разрешающей способности экрана по азимуту следует использовать более крупный масштаб и ЭЛТ с высоким качеством фокусировки Qф.
Важным параметром в ряде случаев является линейная разрешающая способность в тангенциальном направлении, т. е. минимальное расстояние между двумя целями в тангенциальном направлении при одинаковом расстоянии в радиальном направлении (например, отрезок Ц1Ц2 на рис. 1.6.6,а), при котором их можно разделить. Она равна

т. е. растет линейно с повышением дальности.
2.3.4. Разрешаемый объем
Разрешаемый объем РЛС, именуемый также (при импульсном методе) импульсным объемом, является обобщенной мерой разрешающей способности.
Он характеризует часть пространства, облучаемого РЛС, в пределах которого цели не наблюдаются раздельно.
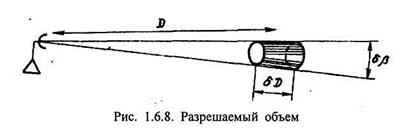
Разрешаемый объем ограничивается диаграммой направленности антенны. Его проще всего определить при использовании иглообразного (конического) луча (рис. 1.6.8). На достаточно большом расстоянии от РЛС часть конуса близка к цилиндру, у которого сторона
| Потенциальный разрешаемый объем, как следует из (1.6.3) и (1.6.8), |

|
равна βD а диаметр основания Dβδ. Поэтому разрешаемый объем

В случае целей, равномерно рассеянных в объеме (например, гидрометеоры), интенсивность отраженного сигнала определяется разрешаемым объемом. Уменьшение последнего позволяет снизить мешающее действие таких объектов.
Понятие разрешаемого объема позволяет уточнить определение точечной цели (см. п. 1.4.1): ее размеры должны быть заметно меньше элементов разрешаемого объема. В этом случае ни длительность всей пачки, ни длительность ее отдельных импульсов при отражении заметно не изменяются.
2.4. Распознавание воздушных объектов
Одно из важнейших направлений современной радиолокации - создание методов получения наиболее полной информации, содержащейся в радиолокационных сигналах и помехах. Радиолокационное распознавание является частью данного направления. Распознавание осуществляется за счет взаимных различий сигналов от воздушных объектов.
Для распознавания могут быть использованы временные, спектральные, корреляционные, энергетические, пространственные, поляризационные характеристики отраженных сигналов с применением устройств внутри - межпери-одной, межобзорной и межканальной обработки, траекторного анализа. Целесообразен анализ излучения бортовых средств. Информативность отдельных признаков распознавания неодинакова, но, очевидно, увеличение числа признаков в целом уменьшает вероятность ошибочных решений.
Реализация методов распознавания определяется видом применяемых зондирующих сигналов и способами обработки. Все методы можно разделить на две группы. Одна группа базируется на использовании информации, содержащейся в структуре отраженных сигналов (сигнальные признаки). Для распознавания используются такие важные характеристики воздушных объектов, как их размеры и форма, особенности движения отдельных частей объекта (вращение винтов, турбин, вибрация элементов корпуса и другие) и всего объекта в целом.
Другая часть методов использует траекторные признаки.
Наилучшие качественные показатели достигаются при использовании широкополосных зондирующих сигналов, обеспечивающих получение радиолокационных портретов воздушных объектов.
В случае, если отдельные элементы объекта не разрешаются, используются энергетические, флюктуационные характеристики, спектр спектр допле-ровских частот, поляризационные свойства отраженного сигнала. Известно, что воздушные объекты создают отраженные сигналы, параметры которых флюктуируют в широких пределах. Степень флюктуации зависит от характера объ-
екта отражения и тем выше, чем сложнее объект и больше его размеры. Оценка флюктуации является одним из признаков распознавания.
Наличие информации об уровнях отраженных сигналов позволяет проводить оценку эффективных поверхностей рассеяния (ЭПР), которые являются еще одним из признаков распознавания.
Анализ флюктуации огибающих пачек отраженных сигналов способствует выявлению модуляционных характеристик, зависящих от особенностей воздушных объектов.
При наличии двух и более частотных каналов в составе средства радиолокации предпочтителен взаимно-корреляционный признак. Сигналы, отраженные от объектов с общим числом «блестящих» точек на различных частотах будут не коррелированы (слобокоррелированы), в то время, как сигналы от объектов с малым числом «блестящих» точек статистически зависимы.
При отражении радиоволн от распознаваемых объектов поляризации падающих и отраженных волн различаются. Поляризация отраженного сигнала изменяется в общем случае из-за различия амплитуд и фаз сигналов, отражаемых отдельными элементами конструкции. Анализ поляризационной матрицы рассеяния позволяет проводить распознавание воздушных объектов.
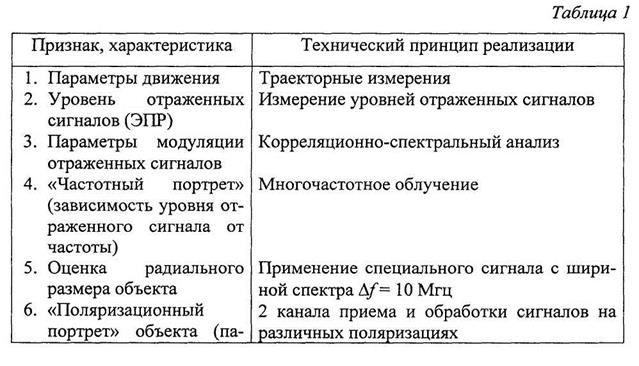
В таблице 1 представлены возможные признаки для распознавания.
|
Использование отдельных признаков требует внедрения технических устройств анализа различной степени сложности, применения сигналов специальной формы.

|
2.4.1. Постановка задачи. Качественные характеристики распознавания
Заданы классы объектов w1, ... wm, характеризуемые признаками xl, ..., xn. Если объект, имеющий признаки х1°, ..., xn° относится к классу wi, то в пространстве признаков характеризующая его точка расположена в области Di. На же. 2.81 изображено разбиение двумерного пространства на области D1 и D2, соответствующие классам w1 и w2. Необходимо определить алгоритмы, обес-течивающие отнесение воздушного объекта к тому или другому классу. Про-
блему оптимизации процедуры распознавания объектов можно разрешить на основе статистической теории многоальтернативного (в частном случае двухальтернативного ) распознавания. Для классической процедуры анализа система должна определять отношение правдоподобия или его логарифм и сравнивать его с порогом. Обозначим
X = {х1, х2,..., хп} - вектор входного сигнала; W(x/wl), w(x/w2) - условные плотности вероятности отраженных сигналов; w1, w2 — признаки, характеризующие принадлежность объекта к различным классам.
Отношение правдоподобия определяется как
где W(w1), W(w2) - априорные вероятности признаков w\ и w2, W{w2)/W(w1) - пороговое значение отношения правдоподобия.
Решение задачи распознавания заключается в выявлении двух гипотез: Н1 - объект относится к классу, который характеризуется признаками w1;H2-объект с признаками w2. Если отношение правдоподобия превышает пороговое значение, принимается гипотеза H1, если нет - гипотеза Н2. В случае использования вместо отношения правдоподобия его логарифма, решающее правило имеет вил

Приведенные уравнения являются оаиесовским критерием, минимизирующим ошибки решения задачи распознавания.
Вероятность ошибки является ключевым параметром в статистической теории распознавания. Различают два типа ошибок: ошибки первого рода, когда объект, характеризуемый признаками w\ отнесен к объекту с признаками w2; ошибки второго рода, когда объект с признаками w2 отнесен к объекту с признаками w\. Общая ошибка определяется как взвешенная сумма названных ошибок

где Д1 и Д2 - пространства признаков w1 и w2;
P1 и Р2 - ошибки первого и второго рода соответственно.
Часто ошибки Р1 и Р2 определяют путем интегрирования плотности вероятности отношения правдоподобия W(l/wi)
Вычисление вероятности ошибочных решений сводится по существу к интегрированию в п мерном пространстве плотности вероятности анализируемых сигналов. Получить значение вероятности ошибки в явном виде зачастую не удается из-за сложности математических вычислений с одной стороны и невозможности точного определения плотности вероятности анализируемых сигналов с другой стороны. При решении многих практических задач применяются или экспериментальные методы или критерии, связанные не с самой вероятностью ошибок, а с ее границами.
Вероятность ошибки распознавания может быть определена следующим образом

|
где α — действительное число, изменяющееся от 0 до 1.
Приведенное неравенство носит название границы Чернова для верхнего значения вероятности ошибки.
Нахождение оптимального значения α связано с рядом трудностей. Вследствие этого, а также учитывая, что α в окрестности оптимального значения обладает малой чувствительностью, положим α=0,5.
Среднюю вероятность ошибки можно определить следующим образом
|
где М- число сигналов для распознавания;
Pcp.ij - средняя вероятность ошибки распознавания i-го j-го сигналов. При использовании границы Чернова

|


При известных учитывая что
(α=0,5) средняя вероятность ошибки определится как

|
Для случая двухальтернативной классификации

Следует заметить, что если взять логарифм натуральный со знаком минус от интеграла, получим известное расстояние Бхаттачария (В) или функцию различимости, которая является критерием разделимости классов.

|
Учитывая приведенное выражение можно записать:
Рср=0,5-е-B; D = 1-Pcp=1-0,5·e-B где D - вероятность правильного
решения задачи.
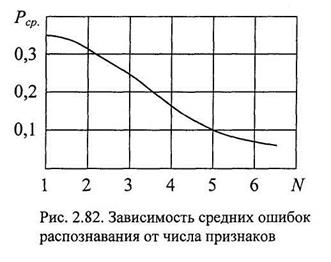
Использование нескольких признаков для распознавания позволяет уменьшить среднюю вероятность ошибочных решений. Если признаки
характеризуются одинаковыми распределениями вероятностей, зависимость средних ошибок распознавания от числа признаков N имеет вид, изображенный на рис. 2.82. Увеличение числа признаков с одного до четырех в два раза уменьшает ошибки распознавания.
Возможно несколько подходов к классификации методов распознавания:

по типу зондирующего сигнала, виду используемой радиолокационной информации и др. Наиболее широко используется распознавание по типу зондирующего сигнала. На рис. 2.83 изображен вариант такого распознавания.
2.4.2. Распознавание по широкополосным сигналам

|
Широкополосные зондирующие сигналы обеспечивают достижение наилучших качественных показателей распознавания. В этом случае удается разрешить отдельные элементы воздушного объекта и получить его радиолокационный портрет.
На рис. 2.84 изображен радиолокации-
онный портрет воздушного судна типа Як-40. Для получения радиолокацион-ного портрета формируется зондирующий сигнал (например с линейной час-тотной модуляцией) с девиацией частоты  Отраженные от объекта радиоимпульсы сжимаются согласованным фильтром, при этом их длительность на выходе фильтра
Отраженные от объекта радиоимпульсы сжимаются согласованным фильтром, при этом их длительность на выходе фильтра 
Распознавание и идентификация объектов в РЛС может осуществляться сравнением радиолокационного портрета с эталонными портретами.
Применение когерентных широкополосных сигналов с шириной спектра 50-100 МГц позволяет обеспечить разрешающую способность в 2-3 метра. При таком разрешении и сформируется радиолокационный портрет объекта. Достоинством таких сигналов является возможность распознавать несколько объектов в пределах одного импульсного объема. Применение широкополосных сигналов имеет ряд особенностей. Во-первых, резко возрастает число элементов разрешения, что ведет к увеличению объема аппаратуры обработки. Во-вторых, дробление пачки отраженного сигнала на отдельные составляющие ухудшает отношение сигнал/шум, что обусловливает уменьшение дальности обнаружения. Отношение дальности распознавания к дальности обнаружения за один обзор составляет 0,7 для объектов больших размеров и 0,95 для малоразмерных объектов. При нескольких обращениях к объекту это отношение улучшается. Применение метода широкополосных сигналов в нескольких пунктах дает возможность определить форму распознаваемых воздушных объектов.
2.4.3. Распознавание по многочастотным сигналам
Многочастотный сигнал позволяет получить некоторый функционал радиолокационного портрета объекта. Применение сигнала для распознавания возможно в диапазоне метровых и сантиметровых волн. Наиболее информативными признаками распознавания являются: радиальный размер объекта, среднее значение модуля поляризационного коэффициента, среднее значение эффективной поверхности рассеяния. По совокупности этих признаков многочастотный сигнал позволяет получить достаточно высокие характеристики распознавания.
Формирование многочастотных сигналов может быть реализовано различными путями. При одновременном излучении зондирующих сигналов на различных частотах получение информации для распознавания требует много-канальности построения приемо-передающих устройств, что ведет к увеличению объема аппаратуры и энергозатратам. Может быть отдано предпочтение сигналам с последовательным излучением сигналов на различных частотах, не требующим существенного усложнения аппаратуры, однако, увеличивающего время анализа и принятия решения.
При облучении воздушных объектов сигналами с достаточно широким спектром эти объекты эквивалентны некоторым линейным электрическим фильтрам с постоянными параметрами, резонансные частоты которых определяются формой объекта и ее геометрическими размерами. Резонансные частоты проявляются в переходном процессе отклика, т.е. в отраженном сигнале. Сигнал с широким спектром может быть получен при использовании коротких импульсов либо многочастотных сигналов. Переходные процессы могут быть описаны либо дифференциальными уравнениями, либо преобразованиями Лапласа. В последнем случае от операций с оригиналами переходят к операциям с изображениями.
Изображение G(p) , характеризующее передаточную функцию линейной системы, может быть представлено в виде
где R(p) - изображение по Лапласу отклика;
Н(р) - изображение по Лапласу некоторого импульсного воздействия
на систему.
Изображения R(p) и (р) являются полиномами от Pi = а + jb, bи а - мнимая
и вещественная части корня полинома Pi. Корни полинома Н(р) называют полюсами.
Отклик системы h(p) в физическом смысле - это либо распределение токов на поверхности распознаваемого объекта, либо напряженность поля рассеянной части волны Е. Форма отклика может быть представлена в виде набора дискретных отсчетов

где Ai- набор вычетов изображения Лапласа;
т = 0, 1, ..., М;
 - шаг дискретизации во времени;
- шаг дискретизации во времени;
N- общее число дискретных отсчетов.
Процесс распознавания можно представить следующим образом. Сигналы, отраженные от объектов, анализируются, в результате чего вычисляются полюса. Полученные значения полюсов сравниваются с эталонами, записанными в блоке памяти.
Метод, использующий зависимость интенсивности отраженных сигналов от длины волны зондирующего сигнала базируется на фундаментальном физическом эффекте вторичного излучения объектов. Интенсивность отражения от каждого токопроводящего объекта зависит от его формы и размеров, а также от длины волны. На низких частотах большинство объектов не отражают падающие электромагнитные волны. При повышении частоты до значения, при котором размеры отражающего объекта приближаются к λ/2 РЛС, интенсивность отражений, характеризующая эффективную поверхность рассеяния объекта, резко увеличивается. Если размер объекта равен λ /2, то эффективная поверхность рассеяния максимальна. При дальнейшем возрастании частоты эффективная поверхность рассеяния будет изменяться и носить колебательный характер. При длине волны значительно меньшей линейных размеров объекта, эффективная поверхность практически неизменна. Таким образом, анализ интенсивности отраженных сигналов на различных частотах является существенным признаком распознавания.
Величина эффективной поверхности рассеяния, полученная на основе многочастотного сигнала, может быть отмечена в виде точки на частотно-пространственной траектории. Местоположение точки будет зависеть от типа, размера облучающего объекта, угла облучения и вида поляризации. Сравнение траектории точки с эталоном позволяет произвести распознавание воздушных объектов.
Дата добавления: 2015-06-22; просмотров: 3480;