Обработка сигналов в условиях воздействия пассивных помех и отражений от «местных предметов».
2.5.1. Физические основы, лежащие в основе компенсации сигналов, отраженных от пассивных помех и «местных предметов».
При работе первичных радиолокаторов (ПРЛ) наблюдается явление отражения электромагнитных волн, излучаемых антенной, от объектов, электрические параметры которых отличаются от параметров среды распространения радиоволн. В частности, такими объектами являются «местные предметы», гидрометеоры (облака, дождь, град, снег), другие объекты естественного происхождения, а также специально создаваемые помеховые сигналы. В дальнейшем все перечисленные виды сигналов будем называть пассивными помехами (1111). Интенсивность ПП может превышать на 30-80 дБ уровень собственных шумов приемника, что приводит к его перегрузке и потере полезного сигнала.
|
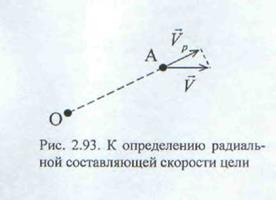
Полезный сигнал (сигнал, отраженный от воздушного судна) и пассивная помеха являются результатом вторичного излучения электромагнитной энергии. Основное различие сигналов заложено в частотах отраженных сигналов и обусловлено разными радиальными составляющими скоростей движения цели
и источников пассивных помех. Пусть в точке О (рис. 2.93) находится передатчик, в точке
А - объект, движущийся со скоростью V.
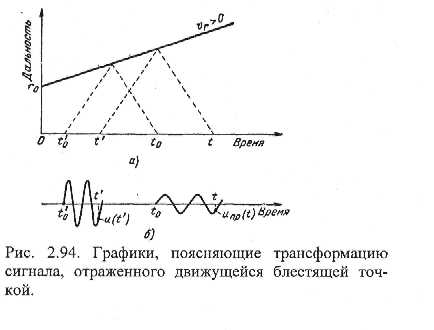
Будем полагать, что объект движется равномерно и прямолинейно с радиальной скоростью Vp (объект удаляется от РЛС). График
движения изображен на рис.2.94, а сплошной линией. Пунктиром показан график распространения электромагнитных колебаний. Из рисунка 2.94, б видно, что происходит трансформация временного масштаба, т.е. растяжение колебаний, отраженных от цели, относительно излученных РЛС. Для приближающей-
ся цели (к < 0) происходит сжатие переменного масштаба. Наряду с трансформацией временного масштаба наблюдается уменьшение амплитуды отраженного сигнала.
|
В соответствии с трансформацией масштаба времени изменяется зависимость принимаемых колебаний Uпр(t) по сравнению с излучаемыми U(t). В случае, если излучаются гармонические колебания

|
имеем следующий результат при приеме [1]
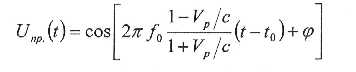
где  , что соответствует трансформации частоты (эффект Доплера). Условимся выражение для частоты принимаемых колебаний записывать в следующем виде:
, что соответствует трансформации частоты (эффект Доплера). Условимся выражение для частоты принимаемых колебаний записывать в следующем виде:
где доплеровская поправка частоты (частота Доплера)

положительна при Vp > 0 иотрицательна при Vр < 0. При  « с можно полагать, что
« с можно полагать, что
В принципе для выделения сигналов движущихся целей можно использовать изменение несущей частоты, частоты повторения импульсов и длительности импульсов, которые наблюдаются при отражении зондирующего сигнала от таких объектов. Однако последние два эффекта очень малы и обнаружить их трудно. Практически представляется возможным зафиксировать изменение несущей частоты. Таким образом, частота Доплера является основным, хотя и не единственным, информативным параметром, спомощью которого осуществляется селекция движущихся целей на фоне пассивных помех.
При импульсной модуляции излучаемых колебаний эффект Доплера проявляется в сдвиге спектра частот на доплеровскую частоту и в изменении фазы излучаемых колебаний от одного периода повторения импульсов к другому относительно начальной фазы излучаемых колебаний. Названные эффекты иллюстрируются на рис. 2.95 и 2.96.

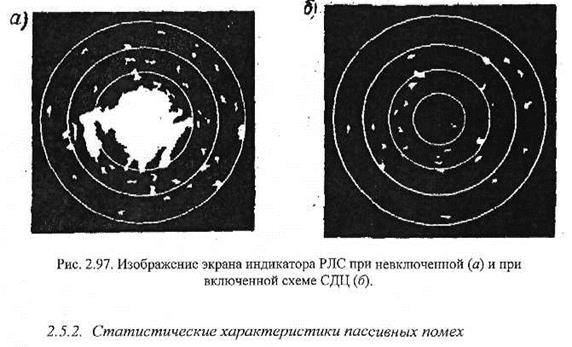
Наличие отражений от пассивных помех не позволяет решать задачиобнаружения и измерения координат воздушных судов без применения систем селекции движущихся целей (СДЦ),
На рис. 2.97, изображены виды индикатора кругового обзора с выключенной и включенной системой СДЦ.
Первичная радиоволна наводит на поверхности объектов токи проводимости или токи смещения, которые являются источником вторичного излучения. Вторичное изучение именуется отражением или рассеянием. Особый интерес для РЛС представляет отражение в обратном направлении (от объекта к РЛС). Большинство реальных объектов имеет сложный характер. Объекты можно разделить на сосредоточенные и распределенные, К сосредоточенным относятся объекты, размеры которых меньше элементов разрешения. Примером являются летательные аппараты,
В таблице 1 приведена простая классификация пассивных помех. К распределенным целям относятся земная и водная поверхность, облака, дождь, снег, туман и другие, для которых соотношение размеров и элементов разрешения не выполняются. Они могут занимать несколько разрешаемых объ-
емов. Вторичное излучение распределенных объектов маскирует полезные сигналы, но иногда находит и практическое использование, например, для обнаружения дождевых и снеговых облаков, навигации самолетов вдоль земной поверхности. Распределенные объекты подразделяются в свою очередь на объемно-распределенные объекты и поверхностно-распределенные.
| Причины образования помех | Характер помех | |||
| Поверхностно- распределённые | Объёмно- распределённые | Сосредоточенные | Прочие | |
| Естественные | Отражения: от земной поверхности; от морской поверхности | Отражения: от метеообразований | Отражения: от атмосферных неоднородностей и оптически ненаблюдаемых объектов | Помехи на n-ом ходе развёртки |
| Искусственные | Отражения: от облаков ,диполей и металлизированных лент | Отражения от крупных наземных сооружений | Сигналы, отражённые от земных движущихся целей, обнаружение которых не входит в задачи РЛС |
Объемно-распределенные объекты (помехи от метеообразований , ди-польные отражатели, ионизированные образования) обычно характеризуются удельной эффективной поверхностью (средним значением эффективнойповерхности на единицу объема). Подобные объекты представляют собой совокупность большого числа элементарных частиц, распределенных случайным образом. Обычно (особенно в сантиметровом и миллиметровом диапазонах волн) имеет практическое значение только некогерентное отражение, при котором сигналы от отдельных частиц можнорассматривать как независимые случайные величины, к которымприменим закон сложения мощностей. Маскирующее действие объемно-распределенных объектов определяется величинойэффективной поверхности о>, приходящейсяна разрешаемый объем V:
 (
(  - удельная эффективная поверхность)
- удельная эффективная поверхность)
где  -среднее значение эффективной поверхности одного элементарного излучателя; n=N*V (N— число излучателей и единице объема).
-среднее значение эффективной поверхности одного элементарного излучателя; n=N*V (N— число излучателей и единице объема).
Гидрометеоры в жидкой фазе (туман, дождь) состоят из капельсферической формы, размеры которых малы по сравнению с длиной волны  . Для этого случая удельная эффективная поверхность равна
. Для этого случая удельная эффективная поверхность равна
где d- диаметр капли.
На рис.2.98. изображен график зависимостиудельной эффективной поверхности обратного вторичного излучения дождя различной интенсивности от длины волны. На рисунке обозначение P соответствует различной интенсивности осадков.
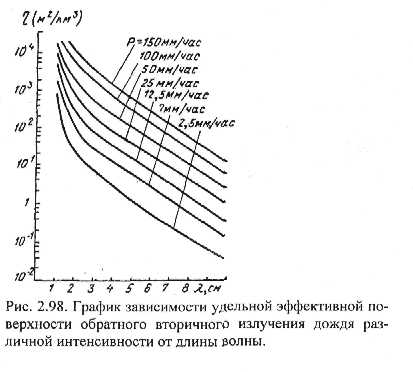
Из-заотражений от метеообразований возникают помеховые сигналы с широким доплеровским спектром, что существенно затрудняет выделение на их фоне сигналов, отраженных от воздушных судов.
Вторичное излучение гидрометеоров в твердой форме (снег, град) значительно слабее, чем в жидкой.
От ионизированных образований (ионосферы, следов метеоров, полярных сияний)возможнытри вида отражений:
1. Полное отражение, которое наблюдается при высокой концентрации электронов
 (электрон/м ) и выше.
(электрон/м ) и выше.
2. Частичное отражение,которое наблюдается в местах резкогопространственного изменения коэффициента преломления.
3.Некогерентноерассеяние на невзаимодействующих флюктуационных скоплениях электронов.
Выше перечисленные объекты относятся к естественным пассивным помехам. Из искусственных маскирующих пассивных помех наибольшее распространение получили дипольные противорадиолокационные отражатели. Они представляют собой пассивные полуволновые вибраторы, изготовленные из металлизированныхбумажных лент, фольги или металлизированного стеклянного и капронового волокна. Ширина лент может быть от нескольких миллиметровдо несколькихсантиметров, а диаметр волокна — от десятков до сотен микрон при толщине металлического покрытия порядка единиц микрон. Обычнодипольные отражатели собираются в пачки в таком количестве, чтобы каждая пачка по своим отражающим свойствам имитировала реальную цель. Число отражателей и пачке можно рассчитать по следующей формуле
Где  - эффективная поверхность рассеяния пачки.
- эффективная поверхность рассеяния пачки.
Для маскировки дипольные отражатели сбрасываютсясборта самолета при помощи автоматов или выстреливаются пушками и ракетами. Для маскировки необходимо, чтобы средняя эффективная поверхность диполей, занимающих импульсный объем РЛС5 превышала среднюю эффективную поверхность целей, находящихся в этом объеме.
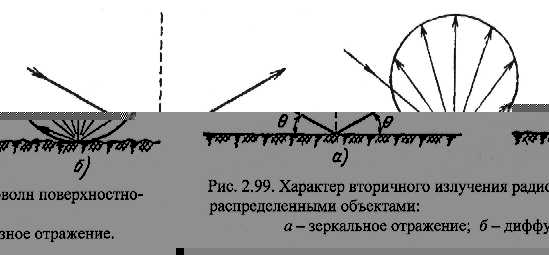
Поверхностно-распределенные объекты. К ним относятся различныеучастки земной поверхности (лес, кустарник, пашня, водная поверхность, здания,постройки и т.д.)- Они могут быть разделеныпа гладкие и шероховатые (неровные) поверхности. Отражение от гладкой поверхности,размеры которой значи-
тельно превосходят длину волны оказывается зеркальным (рис. 2.99, а). Отражение от шероховатых поверхностей с неровностямипорядка длины волны является диффузионным (рис. 2,99, б). При этом падающая волна рассеивается во всех направлениях и часть энергии возвращается к радиолокатору. Диаграмма направленности диффузного вторичного излучения имеет вид сферы, касательной к поверхности. Неровности поверхности по-разному сказываются на различныхдлинах волн и при различных углах облучения. Для РЛС(особенно сантиметрового диапазона волн) большую часть поверхности суши следует считать шероховатой. Зеркальное отражение наблюдается лишь вслучаях гладких поверхностей(спокойная воднаяповерхность, бетонированные участкии т.д.).Шероховатая поверхность формирует обратное излучение, которое вызывает на экране индикаторов светящуюся область.
Дискретные пассивные помехи относятся к особой группе помех от оптически ненаблюдаемых объектов, которые создают на экранах локаторов засветки, подобные отметкам от воздушных судов, медленно перемещающихся л Пространстве. Число таких отметок может достигать очень большого количества, а методы борьбы с пассивными помехами оказываются малоэффективными.
Физической природой, обусловливающих появление дискретных пассивных помех (ДПП) могут быть объекты биологического происхождения (стаи птиц, рои насекомых) и атмосферные образования (диэлектрические неоднородности, турбулентности и другие малоизученные образования). Области существования, плотность иинтенсивность отражений зависят от географическо-
го положения, метеоусловий. Существует годовой и суточный периоды наблюдений. Число ДПП уменьшается с увеличением скорости ветра. Характер движения помех согласуется с направлением среднего ветра.
Возможные высоты наблюдения - 50-3500 м. Наибольшая концентрация ДПП на дальностях 35-70 км. Помехи наблюдаются над сушей и над морем. Время «жизни» объектов составляет от нескольких десятков секунд до десятков минут.
По своим геометрическим размерам помехи являются точечными, линейные размеры которых не превышают 100 м (наиболее вероятные размеры менее 50 м). Огибающая последовательности отраженных импульсов представляет собой гладкую одногорбую кривую, соответствующую диаграмме направленности антенны (рис. 2.100).
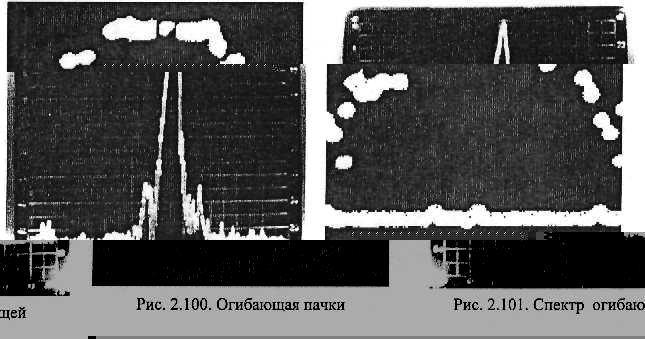
Сигналы обладают высокой когерентностью. Спектры сигналов в большинстве случаев одномодовые. Ширина спектра редко превышает 20-30 Гц (рис. 2.101). Спектры ДПП сохраняют свой характер для различных длин волн.
Доплеровский спектр отличается разнообразием форм и характером изменения во времени. Характер изменения параметров спектра нестационарный.
Еще одним свойством ДПП является их высокая степень деполяризации. При отражении наблюдается деполяризационная компонента, которая на
10-12 дБ меньше основной. Для диэлектрических неоднородностей деполяризация отсутствует.
Таким образом ,ДПП целеподобны (малоразмерный, мало скоростной объект), имеют высокую плотность пространственного распределения и существующие системы СДЦ, не обеспечивают защиту от них.
2.5.3. Когерентность сигналов
Для измерения доплеровских частотных сдвигов у отраженных сигналов используются когерентные РЛС, характеризующиеся когерентностью излучаемых колебаний. Колебания называются когерентными в течение определенного интервала времени, если существует функциональная связь какой-либо части колебания с любой другой ее частью. Для двух гармонических колебаний когерентность достигается в случае, если разность фаз между ними на определенном интервале остается постоянной.
Импульсная последовательность радиоимпульсов характеризуется такими параметрами, как несущая частота, начальная фаза каждого импульса, форма, амплитуда и временное положение импульсов, В общем случае когерентной пачкой импульсов является такая последовательность импульсов, у которой зависимость между указанными параметрами известна. Все параметры импульсной последовательности, кроме соотношения начальных фаз, или известны, или могут быть измерены. Характер соотношения начальных фаз (случайный, неслучайный) определяет когерентность пачки импульсов. Когерентная пачка такая, в которой отсутствуют случайные изменении фазы от импульса к импульсу.
Различают несколько видов обеспечения когерентности колебаний.
1. Истинная внутренняя когерентность достигается тем, что колебания
создаются стабильным задающим генератором, после которого включается
усилитель мощности с устойчивой фазовой характеристикой.
2, Эквивалентная внутренняя когерентность достигается тем, что генератор с самовозбуждением формирует последовательность импульсов постоянной
несущей частоты со случайными начальными фазами. Начальная фаза каждого зондирующего импульса запоминается на время приема отраженных сигналов до следующего зондирования. Путем соответствующей обработки принимаемого колебания эта фаза исключается и принимаемые колебания оказываются практически такими же, как и в случае истинной когерентности.
3. Внешняя когерентность достигается тем, что информация о случайной начальной фазе зондирующего импульса извлекается из приходящих от пассивных помех сигналов.
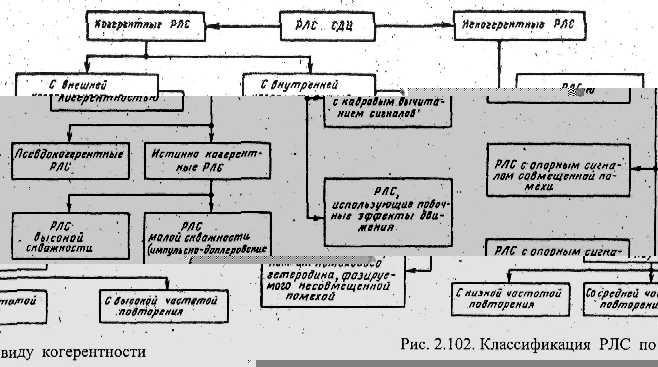
Все радиолокационные станции, имеющие систему СДЦ , разделяются по принципу работы на две группы: когерентные и некогерентные. Классификация РЛС изображена на рис. 2.102,
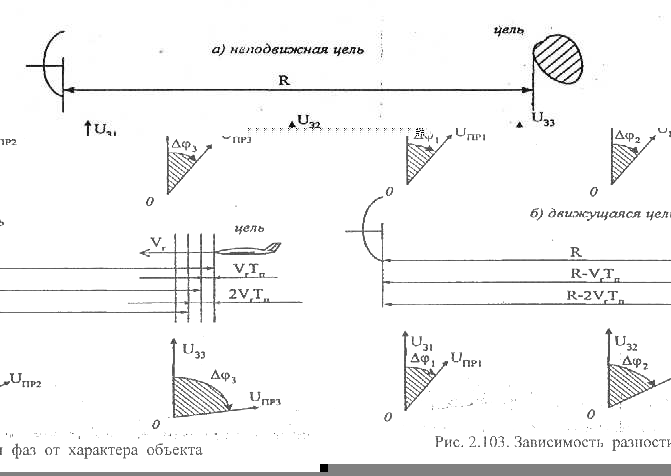
В когерентных РЛС для селекции движущихся целей применяется принцип сравнения по фазе отраженных сигналов с опорным. При когерентности этих колебаний разность фаз сигналов, отраженных от неподвижных объектов, с течением времени меняться не будет, а разность фаз сигналов, отраженных от движущихся целей, будет функцией времени (рис.2.103), Выявляя эти различия с помощью фазового детектора, можно отселектировать полезные сигналы движущихся целей.
Не когерентные РЛС используют для выделения движущихся объектов не фазовую структуру, а смещение огибающей сигнала за значительный промежуток времени либо побочные эффекты движения (изменение диаграммы обратного рассеяния, пропеллерная модуляция и др.).
Когерентные РЛС, в свою очередь, подразделяются на РЛС с внутренней и внешней когерентностью и зависимости от источника опорного сигнала.
2.5.4. Радиолокаторы с эквивалентной внутренней когерентностью
Простой однокаскадный передатчик, работающий в режиме самовозбуждения, каковым является, например, магнетрон, проще передатчиков истинно когерентных РЛС. Особенностью таких передатчиков является случайная начальная фаза формируемого радиоимпульса (импульсы некогерентны). Используя такой передатчик, нельзя подавать на фазочувствительный детектор опорное напряжение с жестко фиксированной фазой. Однако, можно путем запоминания начальной фазы каждого импульса на время периода повторения построить когерентно-импульсную систему, которую называют псевдокогерентной. В
такой системе в качестве опорного напряжения используется специальный генератор - когерентный гетеродин (на высокой или промежуточной частоте), которому навязывается начальная фаза магнетрона. Когерентный гетеродин за
поминает фазу, осуществляя тем самым эквивалентную когерентность.
Структурная схема когерентно-импульсного радиолокатора с эквивалентной внутренней когерентностью изображена на рис.2.104.
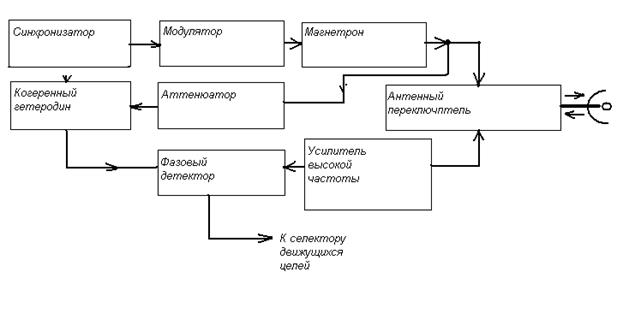
Когерентный гетеродин представляет собой генератор с самовозбуждением. Обычно его колебания искусственно срываются после приема отраженных импульсов от самых далеких объектов. На рис.2.105 изображены эпюры, поясняющие принцип действия когерентного гетеродина.
Рис. 2.105. Пояснение принципа действия когерентного гетеродина.
После начала зондирования в контур когерентного гетеродина поступает напряжение зондирующего импульса. До момента отпирания гетеродина контур работает в режиме вынужденных колебаний, и полная фаза будет равна

После окончания зондирующего импульса и отпирания в некоторый момент времени / = 0 когерентный гетеродин формирует сигнал на своей частоте и его полная фаза

Переход от режима вынужденных колебаний к собственным имеет место при t = 0 и полная фаза колебаний когерентного гетеродина при этом не меняется. Это значит, что начальная фаза сигнала навязывается когерентному гетеродину, т,е.  и остается таковой в течение всего периода следования импульсов.
и остается таковой в течение всего периода следования импульсов.
Время запаздывания отраженного сигнала составляет величину, например,tз (рис.2.105). В этом случае полная фаза отраженного сигнала за время его существования определяется следующим образом:

Разность фаз колебаний когерентного гетеродина и отраженного сигнала является функцией времени:

При наложении колебаний образуется импульс биений, происходящих с разностной частотой. Скос импульса объясняется изменением сдвига фаз между напряжением когерентного гетеродина и отраженного сигнала за время длительности импульса.
Основными нестабильностями , влияющими на СДЦ с внутренней когерентностью, являются;
- нестабильность периода посылки и длительности импульса;
- нестабильность частоты задающего генератора при истинной внутренней
когерентности;
- нестабильность частоты когерентного гетеродина при эквивалентной внутренней когерентности;
- нестабильность частоты сигнала;
- нестабильность частоты местного гетеродина.
Все перечисленные факторы приводят к появлению остатков на выходах схем компенсации. Поэтому применяются специальные меры для стабилизации всех параметров. Особенно сложной является стабилизация частоты при эквивалентной внутренней когерентности. Стабилизация когерентного гетеродина особенно осложняется, поскольку требуется фазирование. Поэтому, для облегчения его стабилизации, работу когерентного гетеродина переводят на промежуточную частоту.
2.5.5. Радиолокаторы с внешней когерентностью
Применение СДЦ с внутренней когерентностью затрудняется по мере расширения спектра доплеровских частот пассивных помех. Такое расширение вызывается двумя обстоятельствами; увеличением верхней границы зоны обнаружения РЛС и укорочением длины волны. В сантиметровом диапазоне волн спектр доплеровских частот может достигать такой величины, что в СДЦ с внутренней когерентностью подавить пассивную помеху весьма трудно. В этом случае используют системы СДЦ с внешней когерентностью.
Принцип работы систем с внешней когерентностью аналогичен системам с внутренней когерентностью. Отличие состоит в том, что когерентный гетеродин фазируется не зондирующим сигналом, а сигналом пассивной помехи, или же сама пассивная помеха используется в качестве источника опорного напряжения. Известно несколько разновидностей метода внешней когерентности.
На рис. 2.306 изображена схема и эпюры, поясняющие возможность не-когерентной компенсации пассивных помех
Принцип работы заключается в следующем .Сигналы от усилителя промежуточной частоты (УПЧ) с большим динамическим диапазоном (например, логарифмическою) поступают на обычный детектор (Д), за которым следует схема череспериодного вычитания (ЧПВ), На индикатор с амплитудной отметкой (АИ) подаются сигналы до схемы ЧПВ или после нее. Соответствующие осциллограммы изображены на рис.2,106, б.
До схемы ЧВП наблюдается продетектированная пассивная помеха, сравнительно медленно флюктуирующая вследствие взаимного перемещения отражателей в каждом разрешаемом объеме. Если внутри некоторых разрешаемых объемов имеются быстро перемещающиеся объекты, то имеют место значительно более быстрые флюктуации. После череспериодного вычитания можно обнаружить пульсации цели на фоне остатков помех. Таким образом, с одновременным приходом отраженных сигналов от пассивных помех и целей обыкновенный амплитудный детектор приобретает свойства фазочувствительного детектора. Опорным напряжением оказывается напряжение пассивной помехи. Фаза этого напряжения и фаза отраженного сигнала одинаково зависят от начальной фазы зондирующего импульса, вследствие чего последняя не влияет па разность фаз сигнала и опорного напряжения. Она зависит лишь от радиальной скорости перемещения объекта относительно пассивной помехи и определяется по формуле:
Схема некогерентной компенсации обладает существенным недостатком. Для разрешаемых объемов, в которых отсутствует помеха, имеет место обыч-
ное детектирование и при отсутствии флюктуации сигналы от целей повторяются каждый период и компенсируются в схеме ЧПВ, Следовательно, а зонах, свободных от пассивных помех, цели окажутся потерянными, если не принять специальных мер.
Одной из таких мер может быть следующая. В тракт обработки вводится искусственная линия задержки с регулируемой задержкой сигналов на промежуточной частоте, подключаемую через переключатель К (рис. 2.107).
Пусть в пределах диаграммы направленности антенны РЛС одновременно находятся цель, движущаяся с радиальной скоростью up и практически неподвижный объект (облако). Сигнал от неподвижного объекта может быть использован для выделения доплеровской частоты сигнала цели. На рисунке цель и облако находятся на различных дальностях и их сигналы в приемнике не
 совпадают во времени. Если в тракте усиления по промежуточной частоте имеется линия задержки на время то задержанный сигнал цели совпадает с сигналом от облака. В УПЧ2 возникнут биения двух сигналов, в результате чего образуется амплитудная модуляция результирующего колебания допплеровской частоты. На выходе детектора ее можно отфильтровать и измерить.
совпадают во времени. Если в тракте усиления по промежуточной частоте имеется линия задержки на время то задержанный сигнал цели совпадает с сигналом от облака. В УПЧ2 возникнут биения двух сигналов, в результате чего образуется амплитудная модуляция результирующего колебания допплеровской частоты. На выходе детектора ее можно отфильтровать и измерить.
Еще одно видоизменение по сравнению с первоначальным вариантом заключается во введении быстродействующего устройства анализа помехи и коммутатора выходного напряжения. При отсутствии помехи на индикатор подается напряжение не с выхода схемы ЧВП, а непосредственно с детектора. Наличие или отсутствие помехи определяется по превышению установленного порога в течение определенного времени. Эффективность коммутации возрастает, если напряжение на детектор подать через небольшую линию задержки, а на анализатор помехи - без задержки. Одним из методов учета свойств помехи является использование корреляционных обратных связей, что позволяет не только компенсировать помеху, но и накапливать полезный сигнал.
Следует обратить внимание на то, что при фазировании когерентного гетеродина помеховыми сигналами они задерживаются на время, равное или несколько большее длительности импульса РЛС, с тем, чтобы предотвратить компенсацию полезных сигналов от целей, летящих в облаке помех.
К достоинствам систем СДЦ с внешней когерентностью можно отнести следующее. Фазирующий импульс помехи проходит те же элементы приемного тракта (от антенны до фазового детектора), что и обрабатываемый сигнал. Следовательно, медленные фазовые нестабильности элементов приемного тракта (УВЧ, смесителя, тракта промежуточной частоты) оказывают одинаковое влияние на фазу опорного напряжения и фазу обрабатываемого сигнала и, следовательно, взаимно компенсируются.
Еще один вариант системы СДЦ с внешней когерентностью предусматривает фазирование когерентного гетеродина помеховыми сигналами. Структурная схема такого устройства изображена на рис.2.108.
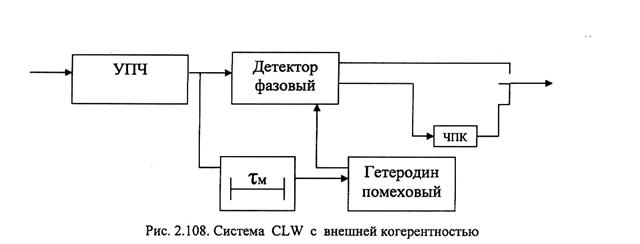
Сравнение принятых колебаний с опорными происходит на фазовом детекторе. Чтобы исключить потерю сигнала при отсутствии помехи в схеме применяют устройство анализа помехи и переключатель, который в отсутствии помехи подключает выход фазового детектора непосредственно к индикатору.
Недостатком схем с внешней когерентностью является расширение спектра помех вследствие нелинейного преобразования колебаний в детекторе. Поэтому качество подавления помех может быть хуже, чем для метода внутренней когерентности.
 |
Принцип работы радиолокатора рассмотрим на примере схемы, изображенной на рис. 2.109.
Стабильный задающий генератор формирует непрерывные колебания несущей частоты (/о), которые являются опорными для фазового детектора. Импульсный модулятор обеспечивает включение усилителя мощности на время излучения импульсов (ти). Усилитель мощности с линейной фазово-частотной характеристикой усиливает колебания несущей частоты до необходимой мощности, которые через антенный переключатель и антенну излучаются в пространство. Отраженный от цели сигнал принимается антенной, усиливается в усилителе высокой частоты и подается на фазовый детектор.
Когерентность сигнала обеспечивается тем, что для формирования зондирующих и опорных колебаний используется один и тот же задающий генератор непрерывных колебаний. В фазовом детекторе осуществляется сравнение начальных фаз приходящих радиоимпульсов с фазой опорного колебания.
Если сигнал отражается от неподвижного объекта, то начальные фазы всех отраженных радиоимпульсов  будут одинаковы
будут одинаковы
где До - расстояние до объекта.
Напряжение на выходе фазового детектора будет представлять собой видеоимпульсы одинаковой амплитуды и полярности, определяемыми дальностью до цели.

|
Если цель движется равномерно, то непрерывно изменяется и сдвиг фаз

|
На выходе фазового детектора образуется последовательность видеоимпульсов с зменяющейся амплитудой и полярностью.
Необходимо заметить, что пассивные помехи, в общем случае не являются неподвижными (кроме «местных» предметов), а перемещаются со скоростью
ветра  что приводит к пульсации помехи на выходе фазового детектора.
что приводит к пульсации помехи на выходе фазового детектора.
Для компенсации пульсаций необходимо частоту опорного сигнала изменять на величину
где  - изменение сдвига фаз за время периода следования Т.
- изменение сдвига фаз за время периода следования Т.
Однако частота опорного сигнала  и даже промежуточная час
и даже промежуточная час
тота  , поэтому в схемах РЛС смещение частот обычно реализуют
, поэтому в схемах РЛС смещение частот обычно реализуют
путем двукратного преобразования частоты. Кроме того компенсацию скорости ветра производят лишь в определенных участках пространства, для чего реализуется стробирование по дальности и угловой координате.
Известны и другие способы компенсации скорости ветра:
- использование систем обработки с внешней когерентностью;
- переход к более длинным волнам (метровый диапазон);
- двухчастотный метод работы РЛС;
- использование схем ЧПК на видеочастоте.
2.5.7. Селекция сигналов движущихся целей
Выше было показано, что физической основой для селекции сигналов движущихся целей является эффект Допплера. При движении воздушного объекта и наличии радиальной составляющей скорости происходит изменение фазы отраженного сигнала относительно излученного. Следовательно, разность фаз сигналов излученных и отраженных, при наличии частоты Допплера, изменяется от периода к периоду (для неподвижных объектов такого нет).
Соотношение фаз сигналов может быть выявлено фазовым детектром. На рис.2.110 изображены сигналы на выходе фазового детектора для неподвижных и подвижных объектов. 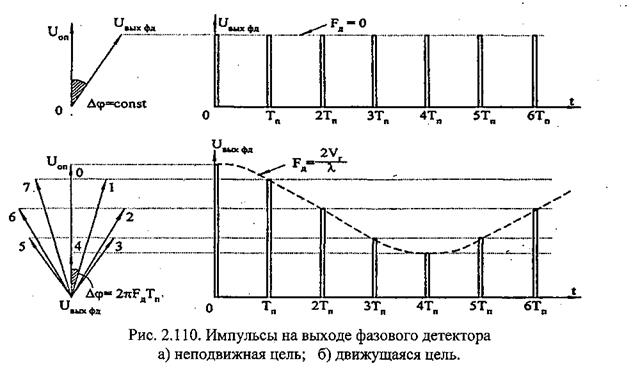
Сравнивая импульсы движущихся и неподвижных объектов, можно сделать заключение, что основным отличием временных функций, соответствующих этим последовательностям, будет наличие переменной составляющей в сигнале движущегося объекта. Следовательно, для селекции движущихся целей необходимо компенсировать на выходе фазового детектора импульсные последовательности с постоянной амплитудой или подавлять в спектре сигнала все гармоники частоты повторения 
Структурную схему системы СДЦ можно представить в виде, изображенном на рис. 2.111.

Система состоит из двух частей: когерентно-импульсной аппаратуры (КИА) и компенсационной аппаратуры (КА). Основу КИА составляют фазовый детектор и когерентный гетеродин (рис. 2.112.).

Компенсационная аппаратура (рис. 2.113) обеспечивает сравнение амплитуд сигналов через период повторения импульсов (метод сравнения по огибающей), что сводится к череспериодной компенсации.

Сигналы после фазового детектора без задержки (прямой канал) и с задержкой на период повторения (задержанный канал) поступают на устройство вычитания (УВ), так что образуется функция
При вычитании одинаковые по амплитуде импульсы компенсируются, а импульсы разной амплитуды дают нескомпенсированные остатки. Полярность остатков различна и при дальнейшей обработке в двухтактном детекторе (Д) формируется последовательность импульсов одной полярности.
С точки зрения оптимальной обработки сигналов движущихся целей на фоне пассивных помех система должна быть построена в соответствии со схемами, изображенными на рис.2.114.

При реализации схемы рис. 2.114, а возможны различные варианты. Можно использовать некогерентный накопитель в виде полосового гребенчатого фильтра (ПГФ) после детектора, а режекторный гребенчатый фильтр (РГФ) включить до детектора в цепи промежуточной частоты. На рис. 2.114, б показана оптимальная обработка для псевдокогерентной когерентно-импульсной РЛС.
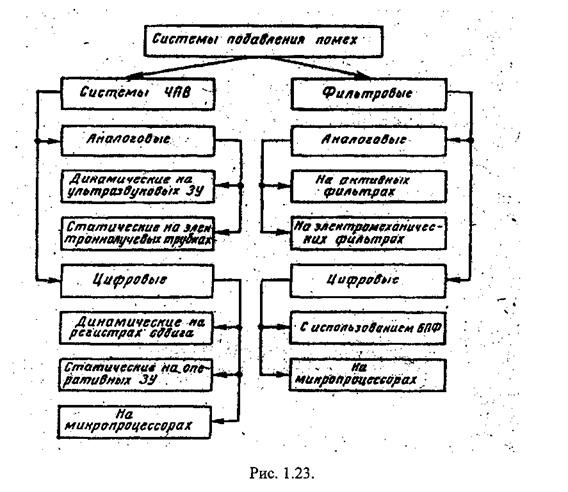
В заключении приводится классификация систем подавления помех (рис.2.115).
В последующих разделах будут рассмотрены ряд особенностей, возникающих при реализации систем СДЦ.
2.5.8. Особенности систем СДЦ
2.5.8.1. Понятие слепого направления.
 Подобная ситуация может возникнуть в том случае, если объект движется (скорость может быть значительной) по окружности относительно РЛС. С течением времени расстояние Д не меняется. Радиальная составляющая скорости ир равна О, следовательно и частота Допплера также равна нулю. Ситуация аналогична случаю неподвижного объекта. На выходе фазового детектора образуется последовательность импульсов с постоянной амплитудой и полярностью и компенсационная аппаратура такие сигналы исключит из обработки. Таким образом, движущийся воздушный объект будет потерян. Для исключения такого случая необходимо выключить систему СДЦ.
Подобная ситуация может возникнуть в том случае, если объект движется (скорость может быть значительной) по окружности относительно РЛС. С течением времени расстояние Д не меняется. Радиальная составляющая скорости ир равна О, следовательно и частота Допплера также равна нулю. Ситуация аналогична случаю неподвижного объекта. На выходе фазового детектора образуется последовательность импульсов с постоянной амплитудой и полярностью и компенсационная аппаратура такие сигналы исключит из обработки. Таким образом, движущийся воздушный объект будет потерян. Для исключения такого случая необходимо выключить систему СДЦ.
2.5.8.2, «Слепые» фазы.
При работе когерентно-импульсной аппаратуры напряжение когерентного гетеродина превышает напряжение сигнала, амплитуда видеоимпульсов на выходе фазового детектора будет определяться следующим образом:
где ср - разность фаз .опорного напряжения когерентного гетеродина и начальной фазой отраженного импульса.
Устройство ЧПВ реагирует на изменение ифд, а следовательно, при фиксированной амплитуде сигнала Ц, на изменение разности фаз <р. Чувствительность системы к изменению разности фаз определяется выражением

 На рис. 2.116 изображены характеристики фазового детектора и его чувствительности.
На рис. 2.116 изображены характеристики фазового детектора и его чувствительности.
Таким образом, чувствительность ФД изменяется во времени с доплеровской частотой. Провалы чувствительности имеют место при разности фаз
 Такие фазы называются «слепыми». Они повторяются
Такие фазы называются «слепыми». Они повторяются
через интервалы времени  В точках «слепых» фаз достаточно значительные изменения разности фаз не приводят к аналогичному изменению амплитуды импульсов на выходе фазового детектора. В этих областях сигналы могут быть подавлены в компенсационной аппаратуре.
В точках «слепых» фаз достаточно значительные изменения разности фаз не приводят к аналогичному изменению амплитуды импульсов на выходе фазового детектора. В этих областях сигналы могут быть подавлены в компенсационной аппаратуре.

 Если подобрать амплитуду опорного напряжения когерентного гетероди
Если подобрать амплитуду опорного напряжения когерентного гетероди
на так, чтобы то
 В этом случае провалы чувствительности будут возникать при т.е. в два
В этом случае провалы чувствительности будут возникать при т.е. в два
раза реже, чем в предыдущем случае. Чтобы избавиться от провалов чувствительности до нуля следует применить балансный детектор (рис. 2.117).

 При
При  амплитуды напряжений, приложенных к каждому из диодов,
амплитуды напряжений, приложенных к каждому из диодов,
для случая равны:

 На выходе балансного детектора напряжение равно:
На выходе балансного детектора напряжение равно:

 Для случая
Для случая
 Чувствительность системы
Чувствительность системы
Чувствительность системы уменьшается до 0,7 от максимума, но нулевые
провалы полностью отсутствуют.
 Более эффективным средством борьбы со «слепыми» фазами является переход к квадратурной системе СДЦ, структурная схема которой изображена на рис. 2.118.
Более эффективным средством борьбы со «слепыми» фазами является переход к квадратурной системе СДЦ, структурная схема которой изображена на рис. 2.118.
 При таком построении используются два фазовых детектора, на которые подаются сдвинутые по фазе на опорные напряжения. После каждого из детекторов имеется свой подавитель с ЧПВ. В результате огибающая импульсов в одном из каналов оказывается промодулированной по синусоидальному закону, а в другом по косинусоидальному рис. 2.119. Если теперь вместо двухтактных детекторов использовать в каждом канале квадратичный детектор, сложить полученные напряжения и далее произвести операцию извлечения корня, то провалы чувствительности одного канала компенсируются повышенной чувствительностью другого. Пачка импульсов оказывается неискаженной.,
При таком построении используются два фазовых детектора, на которые подаются сдвинутые по фазе на опорные напряжения. После каждого из детекторов имеется свой подавитель с ЧПВ. В результате огибающая импульсов в одном из каналов оказывается промодулированной по синусоидальному закону, а в другом по косинусоидальному рис. 2.119. Если теперь вместо двухтактных детекторов использовать в каждом канале квадратичный детектор, сложить полученные напряжения и далее произвести операцию извлечения корня, то провалы чувствительности одного канала компенсируются повышенной чувствительностью другого. Пачка импульсов оказывается неискаженной.,

Аналогичным свойством обладает система СДЦ на промежуточной частоте.
2.5.9. Подавитель на промежуточной частоте
Рассмотрим подавитель на примере псевдокогерентной РЛС, часть схемы которой изображена на рис. 2.120.

В приведенной схеме после когерентного гетеродина вместо фазового детектора включен третий смеситель. При этом колебания когерентного гетеродина являются опорными для этого смесителя. Так как когерентный гетеродин и сигнал приведены к одной и той же промежуточной частоте, то на выходе
смесителя можно получить сигнал на второй промежуточной частоте  которая равна удвоенному значению первой промежуточной частоты.
которая равна удвоенному значению первой промежуточной частоты.
Сигнал второй промежуточной частоты подается на устройство, аналогичное ЧПВ, в котором, вместо вычитающего устройства используется фазовый детектор. Фаза сигналов на входах фазового детектора определяется следующим образом:

где  - суммарная начальная фаза, определяемая действием внутренних и
- суммарная начальная фаза, определяемая действием внутренних и
внешних факторов.
 На выходе фазового детектора образуется сигнал, пропорциональный косинусу разности фаз
На выходе фазового детектора образуется сигнал, пропорциональный косинусу разности фаз

Для компенсации необходимо выполнение условия:


 В противном случае компенсация может отсутствовать при Промежуточ
В противном случае компенсация может отсутствовать при Промежуточ
ная частота должна быть связана с частотой повторения импульсов следующим
образом:
При компенсации на промежуточной частоте предъявляются более жесткие требования к точности задержки, чем при компенсации на видеочастоте. Отсутствует эффект «слепых» фаз.
2.5.10. Череспериодное вычитание
Для череспериодного сравнения амплитуд импульсов с выхода фазового детектора используются устройства череспериодного вычитания или схемы че-респериодной компенсации (ЧПК). Простейший вариант такого устройства изображен на рис. 2.121.

 Операция череспериодного вычитания реализуется в соответствии с выражением
Операция череспериодного вычитания реализуется в соответствии с выражением
Операции обработки линейные, следовательно, и схема представляет собой линейный фильтр. При действии на входе последовательности импульсов с периодом повторения Т„, выходной сигнал представляет собой разность амплитуд входного сигнала и сигнала, задержанного на период повторения  Если амплитуды входных импульсов одинаковы, то на выходе схемы они оказываются подавленными, начиная со второго. Следовательно, сигналы от неподвижных объектов подавляются (рис. 2.122).
Если амплитуды входных импульсов одинаковы, то на выходе схемы они оказываются подавленными, начиная со второго. Следовательно, сигналы от неподвижных объектов подавляются (рис. 2.122).

Если амплитуда изменяется от импульса к импульсу (объект движется), имеет место выходной сигнал в виде последовательности импульсов различной амплитуды и полярности.
Частотная характеристика режекторного гребенчатого фильтра (схемы однократного ЧПВ) может быть определена как отношение комплексных амплитуд выходных и входных сигналов, при условии, что на выход подан гармонический сигнал

Амплитудно-частотная характеристика определится следующим образом:

 Вид АЧХ изображен на рис. 2.123.
Вид АЧХ изображен на рис. 2.123.
 Полагая, что в системе СДЦ обрабатываются сигналы, амплитуда которых изменяются в соответствии с частотой Допплера, амплитудно-частотная характеристика примет следующий вид:
Полагая, что в системе СДЦ обрабатываются сигналы, амплитуда которых изменяются в соответствии с частотой Допплера, амплитудно-частотная характеристика примет следующий вид:
Характеристика имеет нули, положение которых изменяется при изменении периода посылок Т„ на некоторую величину. Частотная характеристика наглядно поясняет работу схемы ЧПВ со спектральной точки зрения. Так как периодическая последовательность импульсов от неподвижных объектов имеет
 спектральные составляющие на частотах , т.е. в нулях час
спектральные составляющие на частотах , т.е. в нулях час
тотной характеристики, то сигналы таких целей полностью подавляются. В
случае движущихся объектов спектральные линии имеют частоты  и
и
такие сигналы проходят на выход подавителя. Однако амплитуда этих сигналов
значительно зависит от скорости воздушного объекта. На рис. 2.124 изображе
но расположение спектральных линий при двух скоростях цели.



 Для допплеровского сдвига (пунктирные линии на рис.2.124), спектральные
Для допплеровского сдвига (пунктирные линии на рис.2.124), спектральные
составляющие заметно подавляются. При подавление отсутствует,
что соответствует оптимальной скорости движения воздушного объекта. Сле
довательно, требуется устройство с более равномерной АЧХ.
Ухудшение качества компенсации однократной системы ЧПВ по сравнению с оптимальным режекторным фильтром, объясняется расширением гребней спектра пачки. Ширина каждого гребня по уровню, близкому к 0,5, определяется величиной 1/МГ, где Т - период повторения; М - число импульсов в пачке. Чем меньше количество импульсов в пачке, тем хуже качество подавления. Качество подавления ухудшается и в том случае, если ширина гребней помехи увеличивается за счет разброса скоростей отражателей.
Сказанное иллюстрируется рисунком 2.125.
В обоих случаях существенное ухудшение качества подавления можно пояснить заостренной формой провалов АЧХ схемы однократного ЧПВ. Для лучшего подавления спектральных составляющих помехи и сохранения спектральных составляющих сигнала желательно иметь частотную характеристику в области режекции достаточно узкими. Этому удовлетворяют в определенной степени подавители с многократной череспериодной компенсацией, которые представляют собой последовательно включенные однократные схемы ЧПВ.
Схема двукратного вычитания представляет собой последовательно включенные две схемы однократного ЧПВ (рис. 2.126).
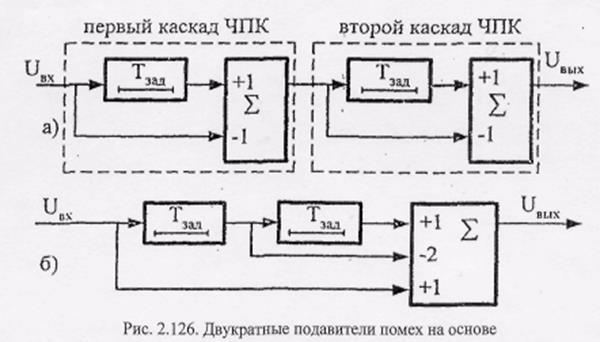
а) каскадного включения простейших схем ЧПК, 6) канонического фильтра второго порядка.
При этом первая схема однократного вычитания формирует первую конечную разность
а вторая схема вырабатывает вторую разность

Амплитудно-частотную характеристику схемы двукратного вычитания можно получить, перемножая АЧХ схем однократного череспериодного вычитания
В этом случае характеристика синус-квадратная, схема двукратного ЧПВ лучше компенсирует расширенные гребни спектра помехи. Улучшение качества подавления можно пояснить с временной точки зрения. Если при линейном нарастании амплитуды импульсов первая схема однократного ЧПВ даст постоянный уровень остатков, то вторая схема его полностью скомпенсирует. Поэтому схема двукратного вычитания в меньшей степени реагирует на амплитудную модуляцию импульсов в пачке, обусловленную обзором по угловой координате или разбросом скоростей отражателей.
Наряду с определенными достоинствами схема двукратного вычитания имеет следующие недостатки:
- увеличение объема аппаратуры;
- расширение области провалов частотной характеристики (ухудшение условий обнаружения движущихся воздушных объектов при некоторых скоростях).
Области провалов можно сузить, сохраняя при этом параболическую форму последних. Для этого могут быть использованы связи (положительные или отрицательные) в качестве цепей коррекции. Пример схемы двукратного ЧПВ с отрицательной обратной связью приведен на рис. 2.127, а результирующая АЧХ - на рис. 2.128.

Результирующая АЧХ имеет провалы параболической формы и примерно постоянное значение в промежутках между ними. В результате этого полезный сигнал при прохождении через схему не ослабляется почти при всех скоростях движения цели. Ширину провалов АЧХ можно регулировать, изменяя величину коэффициента обратной связи β.
Наряду с использованием обратных связей с выхода на вход, возможны более сложные случаи, когда используются обратные связи от промежуточных точек схемы череспериодного вычитания. За счет этого возрастают возможности коррекции амплитудно-частотной характеристики.
2.5.11. «Слепые» скорости воздушных объектов
Эффект «слепых» радиальных скоростей цели характерен для когерентно-импульсных РЛС и отсутствует в случае непрерывных колебаний. Поясним его с помощью рис. 2.129.
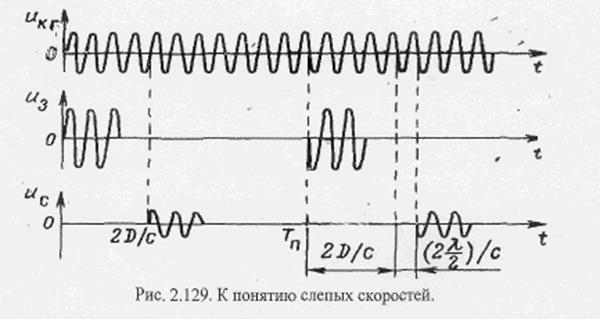
На рисунке изображены зондирующие импульсы, образованные из напряжения когерентного гетеродина и отраженные импульсы для случая, когда расстояние за период повторения Тп от одного обзора до другого изменилось на λ/2. Так как колебания проходят двойной путь до цели и обратно, то общий путь изменится на λ , а фаза на 2π. Фазовый сдвиг между напряжением когерентного гетеродина и обоими импульсами остается одинаковым. Поэтому на выходе фазового детектора оба импульса будут иметь одинаковую амплитуду, пульсации отсутствуют и наличие движения обнаружить невозможно. Аналогично будет происходить, если расстояние до цели за время Тп изменится на nλ/2( n = 1,2,3, …) Соответствующая радиальная скорость движущегося воздушного объекта называется «слепой». Она равна
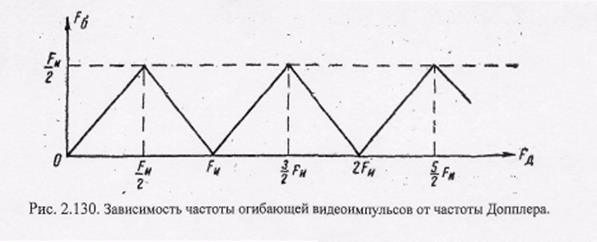
«Слепым» скоростям соответствуют допплеровские частоты
На рис.2.130 изображена зависимость частоты биений от частоты Доп-плера. Максимумы частоты огибающей соответствуют частотам Fд= (k +1/2)F (k = 0, 1, 2, …).Скорости цели, обеспечивающие максимальную частоту пульсаций, называются оптимальными.
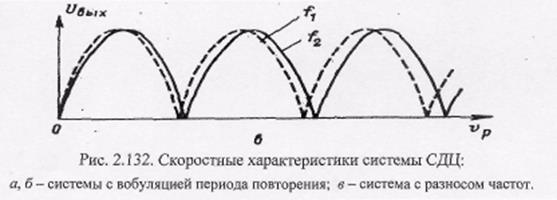
Одним из возможных методов борьбы со «слепыми» скоростями является вобуляция частоты повторения импульсов запуска. На рис.2.131, а изображены импульсы синхронизатора, следующие через период Тп, а на рис.2.131, б —
импульсы запуска модулятора с двухпериодной вобуляцией, при которой интервал между импульсами составляет Тn+ΔТп и Тn-ΔТn . Возможный способ формирования таких импульсов показан на рис.2.131, д.
Генератор синхронизирующих импульсов формирует импульсы с периодом Тп (благодаря синхронизации с помощью УЛЗ). С помощью переключателя, управляемого синхронизатором, между синхронизатором и модулятором через один период повторения подключается линия задержки с задержкой ΔТn , так что один интервал между импульсами возрастает на ΔТn , а второй уменьшается на этот же интервал времени.
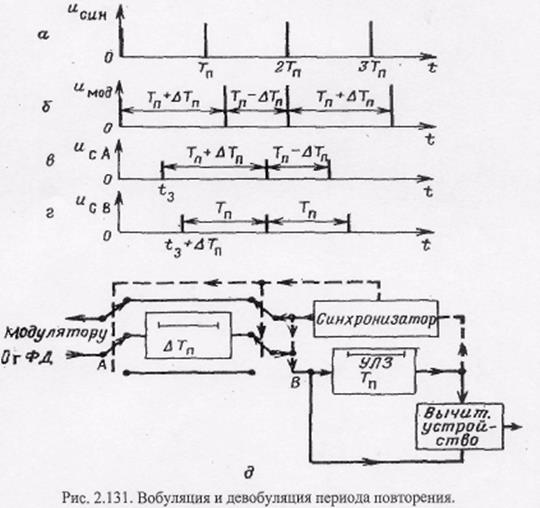
На рис. 2.131, в изображены видеоимпульсы цели, снимаемые с выхода фазового детектора (точка А на рис.2.131, д). При положении переключателей, показанных на схеме рис. 2.131, д, в периоды, когда импульсы передатчика задерживаются на время ΔТn , в цепи фазовой детектор — подавитель, задержка отсутствует и наоборот. Поэтому на входе подавителя (точка В на рис. 2.131, д) отраженные импульсы следуют с одинаковым периодом Тп (девобуляция), что обеспечивает обычный режим работы схемы ЧПВ.
Скоростная характеристика системы СДЦ с вобуляцией частоты повторения импульсов запуска будет определена следующим образом. Если рассматривать каждую пару отраженных импульсов с интервалами  и
и  на выходе фазового детектора, то им соответствуют различные «слепые» скорости. В частности первые «слепые» скорости равны
на выходе фазового детектора, то им соответствуют различные «слепые» скорости. В частности первые «слепые» скорости равны

Результирующая скоростная характеристика может быть определена как результат усреднения этих импульсов по напряжению или мощности

На рис, 1.40, а, б изображены скоростные характеристики системы СДЦ с вобуляцией периода повторения . Если отношение периодов  очень
очень
близко к единице, то «слепая» скорость значительно возрастает (при этом
 одновременно равны +1 или -1).
одновременно равны +1 или -1).
Еще один способ борьбы со «слепыми» скоростями заключается в разносе частот зондирующего сигнала (переход к двухчастотному сигналу передатчика). Использование двух несущих частот/о приводит к возникновению двух последовательностей «слепых» скоростей,
интервал между которыми растет с увеличением номера «слепой» скорости (рис.2.132, в). Применение раздельных систем СДЦ и смешивание выходных сигналов обеспечивает исключение «слепых» скоростей.

2.5.12. Применение систем СДЦ для компенсации сигналов
дискретных пассивных помех
Статистические характеристики дискретных пассивных помех (ДПП), свидетельствуют о достаточной проблематичности их компенсации с помощью существующих систем СДЦ. Однако некоторые особенности, в частности узкий спектр амплитудных флюктуации импульсов пачки отраженных сигналов, позволяют использовать элементы систем СДЦ для компенсации сигналов ДПП.
Квазиоптимальным и достаточно простым устройством спектрального анализа является схема череспериодного вычитания. По сути дела схема ЧПВ является фильтром, выделяющим информативные составляющие спектра амплитудных флюктуации огибающей пачки отраженных сигналов. На рис.2.133
изображены различные характеристики, поясняющие предлагаемый способ фильтрации.
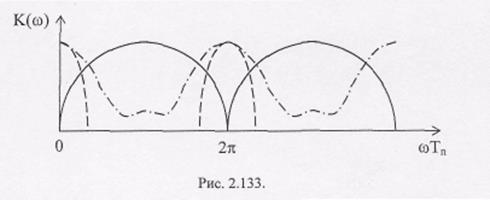
На рисунке сплошной линией изображена амплитудно-частотная характеристика схемы однократного ЧПВ, штриховой линией - амплитудно-частотный спектр слабо флюктуирующих сигналов, штрих-пунктирной - АЧС сильнофлюктуирующего сигнала (реальное воздушное судно). В случае слабофлюктуирующих сигналов (спектр амплитудных флюктуации узкий) уровень сигнала на выходе схемы ЧПВ мал. Во втором случае на выходе схемы ЧПВ будет наблюдаться значительный уровень остатков. Дальнейшая пороговая обработка позволяет исключить сигналы с узким спектром амплитудных флюктуации.
Схема однократного ЧПВ осуществляет, по сути дела, оценку ширины спектра амплитудных флюктуации импульсов пачки отраженных сигналов. Для получения более достоверных оценок целесообразно усреднить полученные результаты путем некогерентного накопления. Схема накопителя, собранного по схеме рециркулятора, изображена на рис.2.134.
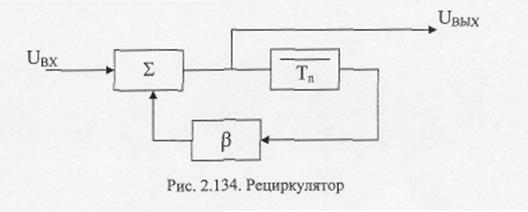
Суммарный сигнал на выходе накопителя равен
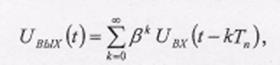
где β — коэффициент обратной связи накопителя β < 1).
Аплитудно-частотная характеристика накопителя определяется следующим
образом:
Устройство компенсации сигналов ДПП предлагается выполнить в соответствии со структурой, изображенной на рис.2.135.
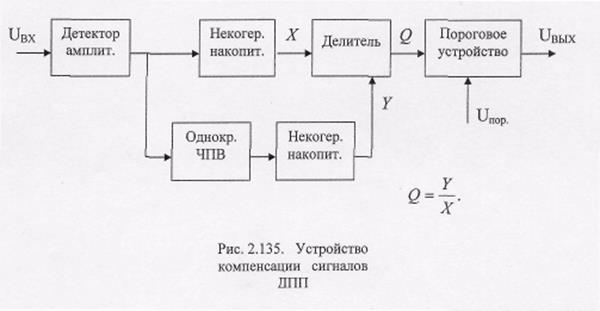
В процессе работы устройства осуществляется накопление импульсов пачки отраженного сигнала с выхода амплитудного детектора приемника РЛС и накопление сигналов, прошедших схему ЧПВ. Если обеспечить сравнение двух накопленных сигналов, то их отношение будет меняться в зависимости от степени флюктуации амплитуды входных импульсов. С ростом амплитудных флюктуации отношение сигналов увеличивается. Пороговая обработка позволяет выделять сигналы с различной степенью амплитудных флюктуации.
Для определения аналитического выражения для отношения накопленных сигналов учтем, что АЧХ схемы ЧПВ имеет следующий вид:
В этом случае мощность сигналов на выходе некогерентного накопителя входного сигнала равна
где S(ω) -энергетический спектр входного сигнала. Во второй цепи накопления

Отношение сигналов

где р- коэффициент междупериодной корреляции.
На рис.2.136 изображена зависимость отношения сигналов Q от коэффициента междупериодной корреляции.
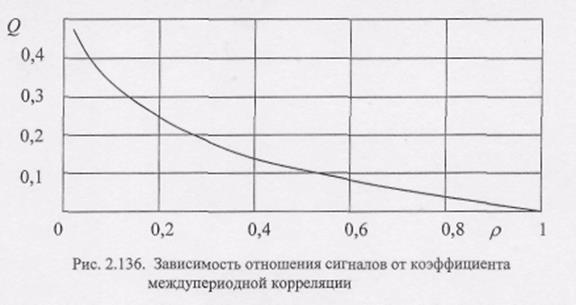
С увеличением коэффициента междупериодной корреляции (сужение спектра амплитудных флюктуации) отношение мощностей Q монотонно убывает, стремясь к нулю в случае полной корреляции импульсов пачки.
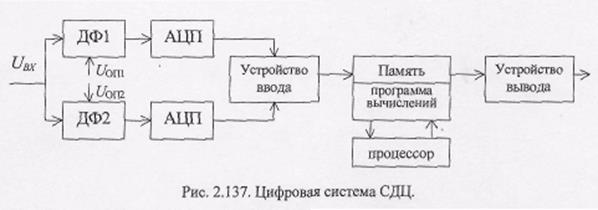
2.5.13. Цифровая система селекции движущихся целей
Одной из возможных реализаций системы СДЦ является цифровая обработка сигналов. При этом, в цифровом виде может быть реализована компенсационная часть системы (череспериодное вычитание). Наиболее просто осуществить в цифровом виде ЧПВ на видеочастоте, что снижает требования к быстродействию процессора. Схема ЧПВ при этом имеет вид, изображенный на рис.2.137.
Задержка на период, при череспериодном вычитании, осуществляется записью цифрового кода, соответствующего амплитудам видеоимпульсов с выхода фазового детектора, в память и извлечением его из памяти через время Т„. Операция вычитания реализуется в арифметическом устройстве, в соответствии с программой вычислений. Алгоритм схемы однократного ЧПВ можно представить в виде, изображенном на рис.2.138, а.
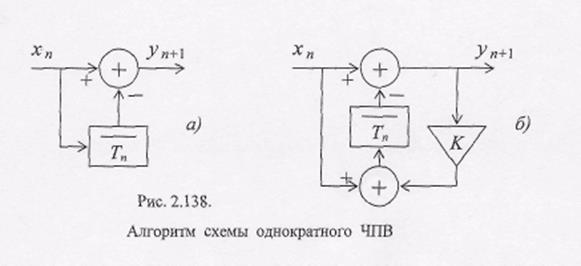
На рис.2.138, б изображена схема, с помощью которой возможна реализация однократного ЧПВ. В этом алгоритме задерживается на период повторения не код на входе хп, а разность хп – k*yn. Такая обработка использует на каждом последующем шаге не только входной сигнал, но и результаты вычислений на предыдущем шаге. Такой алгоритм называется рекурсивным.
Алгоритм, который не использует на последующих шагах результаты вычислений на предыдущих шагах, называется нерекурсивным.
Рекурсия в алгоритме аналогична обратной связи в аналоговой схеме ЧПВ. Она позволяет корректировать форму амплитудно-частотной характеристики в полосе пропускания.
Цифровая система СДЦ позволяет реализовать фильтры второго и более высоких порядков. Это позволяет получить очень высокие значения коэффициента подпомеховоЙ видимости. Реализация схем ЧПВ высоких порядков в аналоговой форме затруднена, так как для этого необходимо иметь идентичные линии задержки и для выравнивания АЧХ в полосе пропускания прецезионные усилители.
В цифровой схеме ЧПВ задержка осуществляется записью числа в память и извлечением его из памяти через время Тn. Усиление в цифровом виде осуществляется умножением. Если в аналоговом виде добиться точности в стабильности коэффициента усиления 1% очень трудно, то в цифровом виде точность определяется числом разрядов цифрового кода и достигает значительных величин. Это позволяет реализовать системы СДЦ в цифровом виде высоких порядков.
На выходах квадратурных каналов системы СДЦ имеются два выходных сигнала Ucos и Usin, полученных как результат разложения входного сигнала с помощью квадратурных фазовых детекторов на ортогональные составляющие. Для восстановления исходного (c учетом обработки) сигнала необходимо выполнить обратную операцию - получение модуля сигнала из его составляющих Ucos и Usin в соответствии с выражением
Непосредственное вычисление модуля сопряжено с рядом неоправданных аппаратны
Дата добавления: 2015-06-22; просмотров: 8956;