ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО РАССТОЯНИЯМ
Сущность способа и его практическое выполнение.Способ определения места судна по расстояниям до визуально наблюдаемых ориентиров — один из наиболее старых способов. До интенсивного внедрения в практику решения навигационных задач судовождения радиолокационных станций само измерение расстояний производилось либо с использованием оптических средств (бинокль с нанесенной шкалой в делениях угломера, навигационный секстан), либо невооруженным глазом. При этом точность обсерваций не удовлетворяла требованиям безопасности плавания в прибрежных зонах вблизи навигационных опасностей.
В настоящее время способ находит относительно редкое применение, однако как резервный, при выходе из строя технических средств навигации, реализующих другие способы определения места, может обеспечить плавание судна с удовлетворительной точностью.
Измеренному до навигационного ориентира расстоянию соответствует навигационная изолиния в виде сферической (на шаре) или сфероидической (на эллипсоиде вращения) окружности. Центр этой окружности совпадает с местом ориентира. На карте в проекции Меркатора при относительно небольших расстояниях, характерных для визуальных способов определения места судна, эта изолиния изображается плоской окружностью с центром в точке, обозначающей ориентир. Модуль градиента расстояния gd равен 1, а направление градиента td совпадает с направлением линии обратного истинного пеленга ориентира, т. е. tд = ОИП.
Если с судна измерить расстояния до двух ориентиров А и В, положение которых известно, а затем на карте из точек расположения этих ориентиров провести окружности радиусами, равными измеренным расстояниям, то одна из точек их пересечения (С) укажет место судна на момент измерения расстояний (рис. 3.1). Неоднозначность решения задачи разрешается привлечением дополнительной информации.
В случае, если наблюдатель один и невозможно измерить два расстояния одновременно или хотя бы достаточно быстро одно после другого, то, чтобы пренебречь ошибкой, происходящей от неодновременности измерения расстояний, можно измерить расстояние до одного ориентира, затем до второго и заметить время и отсчет лага, а затем вторично измерить расстояние до первого ориентира.
Принимая, что за короткий промежуток времени расстояние меняется пропорционально времени, можно считать, что среднее из двух расстояний до второго ориентира будет относиться к моменту, в который измерено расстояние до второго ориентира.

|
Рис. 3.1. Определение места судна по измеренным расстояниям до двух навигационных ориентиров
В настоящее время существуют три способа определения расстояния в море:
• с помощью оптических дальномеров;
• по вертикальному углу ориентира;
• глазомерный.
На судах морского и смешанного река-море плавания дальномерный способ определения расстояния не нашел широкого применения вследствие отсутствия материальной базы. Расстояние, оцененное глазомерно, содержит значительные погрешности, что не позволяет его использовать в штурманском методе решения рассматриваемой задачи навигации. Поэтому, основным средством определения расстояния до навигационного ориентира стал навигационный секстан. Измеренный секстаном и исправленный соответствующими поправками вертикальный угол ориентира дает возможность определить расстояние до последнего, если известны его высота h и высота глаза наблюдателя е.
При определении расстояния до навигационного ориентира возможны два случая:
• основание ориентира находится за видимым горизонтом (измерение вертикального угла производится между видимым горизонтом и вершиной ориентира);
• основание ориентира расположено ближе видимого горизонта (вертикальный угол измеряется между направлением на вершину ориентира и урезом воды).
Рассмотрим первый случай, полагая Землю шаром радиуса R = 6371116 м. Пусть наблюдатель находится в точке Сна высоте е над поверхностью Земли, высота ориентира над уровнем моря ВМ равна h, а вершина ориентира находится в точке М (рис.3.2).
Измеряется вертикальный угол ризм между направлением на вершину ориентира и видимым горизонтом. Из-за земной рефракции этот угол будет равен углу между касательными СЕ и CL к световым лучам СМ и CL'.
Обозначим угол между плоскостью истинного горизонта Н— Н и касательной CL буквой d. Угол d называется наклонением видимого горизонта и, как правило, отрицателен. Из рис. 3.2 следует, что
b=b изм - d. (3.1)
Формула (3.1) алгебраическая, наклонение видимого горизонта d входит в нее со своим знаком.
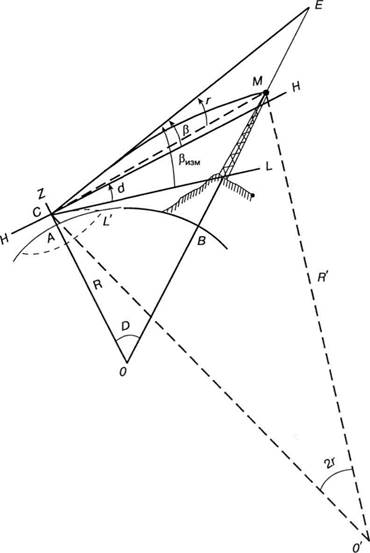
Рис. 3.2. Измерение вертикального угла относительно видимого горизонта
Приняв допущение, что tg b » b и выразив вертикальный угол b между плоскостью истинного горизонта и вершиной ориентира в угловых минутах, расстояние до ориентира D — в морских милях, высоту ориентира h над уровнем моря и высоту глаза наблюдателя е — в метрах, приняв, что R = 3437,75 морских миль, а c = 0,16, получим окончательную формулу для вычисления расстояния по измеренному вертикальному углу навигационного ориентира:
D =  (3.6)
(3.6)
Вопросы для самоконтроля
1. В чем заключается сущность способа и его применение в ОМС по расстояниям?
2. Как определяется расстояние до ориентира по вертикальному углу, измеренным секстаном?
3. Каков порядок вычисления расстояний?
4. Какова точность способа?
Глава 4
Определение места судна по разновременным линиям положения
Сущность способа. Все наблюдения, выполненные для определения места судна, являются, строго говоря, разновременными. Исключение составляют те относительно редкие случаи, когда измерения навигационных параметров производятся по общей команде несколькими наблюдателями.
При измерениях одним наблюдателем влияние неодновременности наблюдений обычно устраняют оптимальным выбором последовательности измерений, их быстротой, повторными измерениями навигационных параметров. Однако при больших промежутках времени между измерениями эти приемы оказываются мало эффективными или вообще непригодными. Появляется необходимость применения других методов обработки результатов навигационных измерений, т. е. разработки других способов определения места.
В практике судовождения часты случаи, когда необходимо уточнить координаты места судна, а в поле зрения имеется один навигационный ориентир, дающий возможность измерять только однородные навигационные параметры (например, пеленг или расстояние). Имеют место также случаи, когда в районе плавания судна имеются два или несколько ориентиров, однако зоны их действия не перекрываются и судоводитель производит навигационные измерения по мере появления их в поле зрения. В данных ситуациях находят применение специфические способы определения места судна.
Особенность разновременных наблюдений на ходу судна заключается в том, что измерения навигационных параметров производятся из разных мест. Возникает необходимость приведения результатов измерения к одному месту, или к одному зениту. После выполнения этой операции навигационные параметры и сведенные с ними навигационные изолинии (линии положения) называются приведенными. В пересечении приведенных изолиний или линий положения находится обсервованное место судна на момент обсервации Т0, к которому приведены все измерения. В качестве Т0 принимают обычно момент последнего измерения.
Приведение к одному месту заключается в учете при обработке разновременных наблюдений перемещения судна за промежуток времени между моментом измерения i-го параметра Т1 и моментом То
Перемещение судна за время Т0 — Т1 характеризуется вектором Si Направление его относительно меридиана обозначим символомK (это может быть ПУС, ПУа, ПУbИК). Длина вектора¯Sii:S= (Toi- Ti) где V— путевая скорость.
Если в интервале времени Т0 –T судно изменило курс, то вектор Sопределяется как сумма векторов его частных перемещений за это время.
Приведение навигационных параметров (изолиний, линий положения) может осуществляться двумя способами: графическим или аналитическим. Рассмотрим подробнее графическое приведение к одному месту. Такое приведение состоит в том, что каждую точку приводимой i-ой навигационной изолинии смещают по направлению движения судна на величину Si.
Если на навигационной карте изолиния изображается прямой (например, изолиния визуального пеленга), то из произвольной точки этой прямой проводится вектор абсолютного перемещения судна за промежуток времени между моментами навигационных измерений. Из конца этого вектора проводится прямая линия, параллельная исходной линии положения.
Если изолиния представляет собой окружность (изогона, изостадия), то смещению подлежит центр окружности. Из перемещенного центра проводится смещенная навигационная изолиния.
Если изолиния представлена сложной кривой (например, изобатой), то поступают следующим образом:
• на исходной изолинии намечают несколько характерных точек;
• каждую точку смещают на величину абсолютного перемещения судна;
• смещенные точки соединяют плавной кривой, получая приведенную навигационную изолинию.
Во всех случаях мы использовали для получения места вектор абсолютного перемещения судна за время между измерениями навигационного параметра. Этот вектор определяется методом счисления. По этой причине место, полученное по разновременным линиям положения, называется счислимо-обсервованным.
Общая формула для оценки точности имеет вид:
Mco =  (4.1)
(4.1)
где mлп1(пр) – СКП первой приведенной линии положения, mлп2 - СКП
Дата добавления: 2015-06-22; просмотров: 2627;