Определение места судна по двум горизонтальным углам
Сущность способа и его практическое выполнение. Рассматриваемый способ — один из самых старых визуальных способов определения места и обладает рядом важных достоинств:
• не требует для своей реализации наличия на судне курсоуказателя;
• является самым точным из визуальных способов определения места.
Его можно применять при сомнениях в поправке компаса и для повышения точности обсервации (например, при ведении дноуглубительных работ, бурении скважины, прокладки кабеля и др.).
К недостаткам способа относятся его трудоемкость, наличие случаев неопределенности и отсутствие контроля, вследствие чего возможны незамеченные промахи.
В рассматриваемом способе определения места судна в качестве навигационного параметра выступает горизонтальный угол между направлениями на два навигационных ориентира, измеренный секстаном. Этому навигационному параметру соответствует навигационная изолиния в виде окружности, проходящей через ориентиры и место судна. При измерении горизонтального утла между визуально наблюдаемыми ориентирами (расстояние до ориентиров не превышает 10—12 миль) эта окружность является плоской. Название навигационной изолинии — изогона. Градиент горизонтального утла gaнаправлен к центру изогоны. Модуль градиента [ga] определяется выражением:
ga =  (2.7)
(2.7)
где b — расстояние между навигационными ориентирами (база); D1D2 — расстояния до первого и второго ориентиров от места измерения соответственно (т.С).
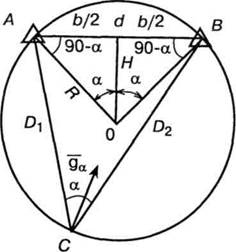
Рис. 2.6. Построение изогоны
Из рисунка 2.6 следует, что центр изогоны (т.О) удален от центра базы на расстояние
H =  ctga (2.8)
ctga (2.8)
а радиус кривизны определяется выражением:
R = coseca (2.9)
Построение изогоны может осуществляться двумя способами:
• нахождением центра изогоны и ее радиуса по формулам (2.8) и(2.9);
• нахождением центра изогоны путем графических построений: из точек А и В под утлом (90 — a)° к базовой линии проводятся два луча, а из середины базы (точка d) восстанавливается перпендикуляр к линии базы; все три линии при правильном построении пересекаются в одной точке — центре изогоны.
Точность способа.Точность изогоны оценивается средней квадратической погрешностью mил, рассчитываемой по формуле:
mил =  (2.10)
(2.10)
где ma - СКП измеренного (с учетом поправок) горизонтального угла, рад.

| a1 = const |
a2 = const
Рис. 2.7. Определение места судна по двум горизонтальным углам

Рис. 2.8. Случай неопределенности
В свою очередь
ma2 = m2oc + m2Doc (2.13)
где тoc — СКП отсчета секстана (при измерении утла секстаном);
mDoc — СКП учитываемой поправки секстана.
Если измерить горизонтальный угол между вторым (В) и третьим (С) ориентирами, то будет получена вторая навигационная изолиния a2 = const (рис. 2.7). В пересечении первой и второй изолиний получим обсервованное место судна (т. F). Обе изолинии пересекаются в двух точках, однако неоднозначность не имеет места, так как в одной из этих точек находится средний ориентир.
Случай неопределенности имеет место тогда, когда все три ориентира и место судна оказываются на одной окружности (рис.2.8). Признаком случая неопределенности является соблюдение равенства
a1 + a2 + b = 180°, где b — угол между базовыми линиями при среднем ориентире.
Неопределенность исключается при следующем взаимном расположении ориентиров:
• все три ориентира располагаются на одной прямой (b = 180°);
• средний ориентир располагается ближе к счислимому месту судна, чем крайние (b > 180°);
• счислимое место судна находится внутри треугольника, образованного ориентирами;
• счислимое место судна находится на равных расстояниях от всех трех ориентиров.
Горизонтальные утлы между направлениями на навигационные ориентиры могут быть получены следующими приемами:
• непосредственным измерением углов навигационным или промерным секстаном;
• измерением визуальных пеленгов на ориентиры и их последующей обработкой.
При использовании секстана полученные в результате измерения утлы (в градусах и угловых минутах) исправляют поправкой секстана Dос, включающую в себя поправку индекса i и инструментальную поправку s. Таким образом, горизонтальный угол a рассчитывается по формуле:
a= ОС+Dос= OC+(i+s),
где ОС — отсчет секстана.
При использовании второго приема значения горизонтальных углов получаются как разности измеренных тем или иным способом пеленгов навигационных ориентиров (П1, П2, П3):
a1 = П2 – П1, a2 = П3 – П2
Такой прием рекомендуется к применению, когда все направления, измеренные с помощью компаса, содержат постоянную, но неизвестную погрешность.
В практике применения данного способа определения места судна обычно реализуются три способа получения места на морской навигационной карте:
1) построением навигационных изолиний;
2) с помощью протрактора;
3) с помощью кальки.
Первый способ наиболее точен, позволяет выявить случай неопределенности при одноразовом ОМС и не требует специальных навыков у судоводителей. Приемы нахождения центра изогоны и ее радиуса рассмотрены нами ранее. Способ находит широкое применение при построении сеток изолиний, соответствующих измеренным горизонтальным углам.
Второй способ находит применение, как правило, в однократной обсервации. При его реализации крайние подвижные линейки протрактора устанавливаются относительно средней неподвижной линейки под углами a1 и a2. Затем грани линеек совмещаются с изображениями соответствующих ориентиров на карте. Центральная точка протрактора соответствует обсервованному месту судна.
Третий способ находит применение, когда на судне отсутствует протрактор. Из произвольной точки на кальке проводятся три луча, углы между которыми равны измеренным горизонтальным углам a1 и a2. Накладывая кальку на карту, добиваются такого положения, при котором лучи проходят через изображения навигационных ориентиров. Место судна фиксируется уколом циркуля в точке, из которой проведены лучи.
При рассмотрении сущности способа определения места предполагалось, что оба угла a1 и a2 измеряются одновременно. На практике такое одновременное измерение может быть реализовано только при наличии двух наблюдателей. Если наблюдатель один, необходимо оба наблюдения привести к одному моменту. Для этого сначала измеряется один угол, например a1¢, затем угол a2 и опять угол a1¢¢. В расчет принимается угол a2 и среднее значение угла a1 = (a1¢ + a1¢¢). Показания лага и время замечаются в момент измерения угла a2.
Применение этого метода имеет смысл только при большой скорости судна и ведении прокладки повышенной точности на карте крупного масштаба. Обычно уменьшения влияния неодновременности наблюдения добиваются соответствующим выбором порядка измерения углов:
• первым измеряется угол, для которого смещение навигационной изолинии за время между наблюдениями ориентиров будет минимальным;
• первым измеряется угол, требующий большего времени для измерения.
Время и отсчет лага относятся к моменту второго наблюдения.
Если планируется серия обсерваций по горизонтальным углам, то перед выходом судна в море на крупномасштабной карте вычерчивается сетка изолиний горизонтальных углов — семейство изогон (окружностей), соответствующих различным углам a. Центр окружности, вмещающей угол aI, находится на перпендикуляре к середине базы b — отрезку между ориентирами — в удалении от нее
H = 0,5bictgai
Изогоны каждой пары ориентиров проводятся различным цветом. Каждая изогона оцифровывается соответствующим значением утла ai.
Определение места судна в этом случае существенно ускоряется. Оно сводится к нахождению точки пересечения двух изогон, соответствующих обсервованным углам ai.
Точность способа.Радиальная средняя квадратическая погрешность места судна может быть рассчитана по формуле
M0 = 
M0 = 

где Q - угол пересечения линий положения.
В большинстве случаев ma1 = ma2 = ma, а Q = 360° - (a1 + a2 + b).
Тогда
M0 = 
 (2.14)
(2.14)
Из анализа формулы (2.14) следует, что для повышения точности места необходимо выбирать ориентиры, имеющие большие базовые расстояния d1 и d2, как можно меньшие расстояния D1, D2 и D3 от судна, а также повышать точность измерения горизонтальных углов.
СКП обсервации по горизонтальным углам в средних условиях (D = 8 ¸ 10 миль, b = 3 ¸ 5 миль, Q = 45°) оценивается величиной М0 = 0,1¸0,З кбт.
Вопросы для самоконтроля
1. В чем состоит сущность способа и его практическое применение?
2. Как определяется точность способа?
3. В чем заключаются недостатки способа?
4. Каковы правила взятия пеленгов?
5. Какова погрешность способа?
6. В чем состоит сущность определения места по трем пеленгам?
7. Что такое треугольник погрешности?
8. Как отыскивается ОМС в треугольнике погрешности?
9. В чем заключаются промахи судоводителя при ОМС?
10. Каковы причины появления треугольника погрешности?
11. В чем состоят достоинства способа ОМС по двум горизонтальным углам?
12. Что такое изогона?
13. Каковы способы получения места судна на навигационных картах?
14. Каков порядок взятия углов?
Дата добавления: 2015-06-22; просмотров: 3033;