Определение места судна по пеленгам трех навигационных ориентиров
Сущность способа и его практическое выполнение.Рассмотренный выше способ обладает существенным недостатком — отсутствием контрольной линии положения, что не дает возможности выявить возможный промах при измерении пеленгов. Для повышения надежности обсерваций и объективного суждения о поправке компаса производится пеленгование третьего ориентира.
При измерении пеленгов трех ориентиров судоводитель получает три линии положения, которые при отсутствии погрешностей в пеленгах пересекаются в одной точке. Эта точка и является обсервованным местом судна.
Перед измерением пеленгов выбирают на берегу три ориентира с расчетом, чтобы углы между их пеленгами были от 60 до 120°, и намечают порядок пеленгования. В общем случае первыми берут пеленги ориентиров, расположенных дальше от траверза, т. е. на более острых курсовых углах. Направления на них меняются медленнее и, следовательно, неодновременность пеленгования меньше будет сказываться на точности полученного места.
Ночью, чтобы сократить время между моментами пеленгования, этот порядок может быть изменен. Первыми пеленгуют маяки, на измерение пеленгов которых затрачивают больше времени. Например, если в видимости судоводителя имеются проблесковые и постоянные огни, то первыми, дождавшись проблеска, пеленгуют проблесковые огни, а затем — постоянные.
После опознания ориентиров, быстро и последовательно производится их пеленгование. При скорости судна более 10 узлов и незначительных расстояниях до ориентиров взятые пеленги приводят к одному моменту, измеряя их в таком порядке: три пеленга берут в обычной последовательности, а затем повторно измеряют пеленги второго и вслед за ним первого ориентира. Время и отсчет лага замечают при взятии третьего пеленга. Для исправления поправкой компаса и прокладки на карте получают три отсчета компасных пеленгов:
ОКП1 =  (2.4)
(2.4)
ОКП2 =  (2.5)
(2.5)
ОКП3 остается без изменений.
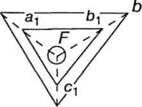
Треугольник погрешностей. Приемы отыскания обсервованного места, оценка точности обсервации. Проложенные линии положения, как правило, не пересекаются в одной точке, а образуют треугольник, который получил название треугольника погрешностей (рис. 2.3). Возможные причины появления треугольника:
1) погрешности, обусловленные неодновременностью измерения пеленгов;
2) неточное нанесение ориентиров на карту или ошибки в опознании ориентиров;
3) случайные погрешности пеленгования и прокладки линий положения на навигационной карте;
4) ошибки в поправке компаса, принятой для исправления пеленгов.
Влияние первой причины может быть уменьшено применением изложенной выше методики пеленгования навигационных ориентиров.
Влияние второй причины может быть исключено путем использования только штатных средств навигационного оборудования и надежным опознанием этих средств.
Влияние третьей и четвертой причин может быть уменьшено применением специальных приемов или учета этого влияния.
Получение треугольника погрешностей при обсервации ставит перед судоводителем две задачи:
· найти вероятнейшее место судна, полученное в ходе обсервации;
· оценить точность этого места.
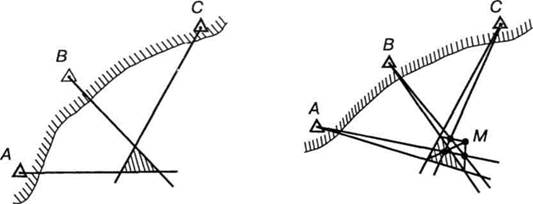
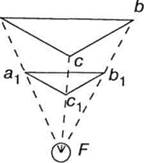
Рис.2.3. Треугольник погрешностей Рис.2.4. "Разгон" треугольника погрешностей
Решение этих задач зависит от принятой гипотезы о характере причин, обусловивших возникновение треугольника погрешностей. Таких гипотез может быть несколько:
• треугольник появился вследствие промахов при снятии отсчета или при исправлении компасных пеленгов;
• треугольник обусловлен чисто случайными погрешностями, например, погрешностями пеленгования;
• треугольник обусловлен систематическими (постоянными или повторяющимися при измерении каждого пеленга) погрешностями;
• появление треугольника обусловлено совокупным влиянием систематических и случайных погрешностей.
Промахи в наблюдениях сразу же обнаруживаются из-за появления большого треугольника погрешностей. Чтобы убедиться, что причиной этого не является промах, измерения пеленгов повторяют, а расчеты проверяют.
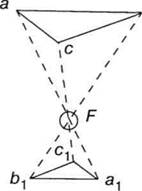
Когда имеется уверенность в правильности опознания ориентиров и в отсутствии грубых погрешностей в пеленгах, а треугольник получается большим, то это свидетельствует о погрешности в принятой поправке компаса. Чтобы исключить такую погрешность, поступают следующим образом (рис. 2.4):
• все пеленги изменяют на 3—5° в ту или иную сторону, и после прокладки они образуют новый треугольник погрешностей;
• через сходственные вершины старого и нового треугольников погрешностей проводят линии, а точку их пересечения (М) принимают за обсервованное место судна, свободное от влияния систематической погрешности в поправке компаса DК;
• точку М соединяют с ориентирами на карте и измеряют транспортиром полученные истинные пеленги. Сравнив их с компасными пеленгами тех же ориентиров, находят три значения поправки компаса DК= ОИП— ОКП. Среднее арифметическое из полученных результатов принимают за действительную поправку на данном курсе.
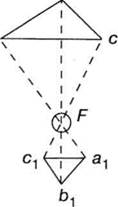
Наиболее характерное расположение треугольников погрешностей, полученных первоначально и после прокладки измененных пеленгов, показано на рис.2.5.
Случайные погрешности пеленгования и прокладки на карте измеренных пеленгов обычно невелики (mпел = 0,5 ÷ 0,7°). Поэтому треугольник погрешностей на путевой навигационной карте при расстояниях до ориентиров 10—12 миль получается незначительным. Его стороны, как правило, не превышают 5—7 мм.
Если треугольник близок к равностороннему, то обсервованное место принимается в его середине.
|
|
|
|

|

|
Рис.2.5. Характерное расположение треугольников погрешностей
При равнобедренном и косоугольном треугольниках вероятнейшее место судна принимается ближе к меньшей стороне и углу, более близкому к прямому (на пересечении медиан).
Точность обсервованного места может быть оценена радиальной средней квадратической погрешностью М0, которая рассчитывается по формуле:
M0 = 
 (2.6)
(2.6)
a1 = КП2 – КП1, a2 = КП3 – КП2, a1+a2 = КП3 – КП1; D1, D2, D3 — расстояния от обсервованного места до первого, второго и третьего ориентиров соответственно, мили.
Дата добавления: 2015-06-22; просмотров: 3923;