Расчетные скорости на смежных участках автомобильных дорог не должны отличаться более чем на 20%.
Основная расчетная скорость движения для дорог I категории соответствует средним скоростям, которые могут развивать современные легковые автомобили, а расчетная скорость для дорог IV категории близка к максимальным скоростям грузовых автомобилей производства СНГ.
Таблица 2.3. Расчетные скорости движения
| Категория дороги | Расчетные скорости, км/ч | ||
| основные | допускаемые на трудных участках местности | ||
| пересеченной | горной | ||
| I-а | |||
| I-б | |||
| II | |||
| III | |||
| IV | |||
| V |
Примечания: 1. К трудным участкам пересеченной местности относится рельеф, прорезанный часто чередующимися глубокими долинами, с разницей отметок долин и водоразделов более 50 м на расстоянии не свыше 0,5 км, с глубокими боковыми балками и оврагами, с неустойчивыми склонами. 2. При наличии вдоль трассы автомобильных дорог, проектируемых на подходах к городам, капитальных дорогостоящих сооружений и лесных массивов, а также в случаях пересечения дорогами земель, занятых особо ценными сельскохозяйственными культурами и садами, при соответствующем технико-экономическом обосновании допускается принимать расчетные скорости, установленные в табл. 2.3 для трудных участков пересеченной местности.
При движении по дороге потока транспортных средств из-за взаимных помех скорости движения снижаются по сравнению с расчетными. Однако расчет элементов на высокие скорости обеспечивает удобство и безопасность движения в часы меньшей загрузки дороги.
По дорогам низших категорий происходит движение тех же автомобилей, что и по дорогам высших категорий. Однако дороги III-V категорий ограничивают возможности автомобилей в полной мере использовать свои динамические качества. Поэтому в нормах проектирования автомобильных дорог специально оговорено, что всегда, когда позволяют условия местности и это не связано с существенным увеличением объемов и стоимости работ, следует предусматривать значения элементов плана и продольного профиля дорог, обеспечивающие высокие скорости движения, если возможно даже превышающие расчетные для дорог I категории. Расчетные скорости движения автомобилей, принятые в Беларуси, примерно соответствуют расчетным скоростям в других странах.
Нагрузку на одиночную наиболее нагруженную ось двухосного автомобиля для расчета прочности дорожных одежд, а также проверки устойчивости земляного полотна принимается в зависимости от категории дороги: I-IV категорий – 100 кН (10 тс); V категории – 60 кН (6 тс).
3. ОСНОВЫ РАСЧЕТОВ ДВИЖЕНИЯ АВТОМОБИЛЕЙ ПО ДОРОГАМ
3.1. Характеристика движения по автомобильной дороге
Основными видами подвижного состава автомобильных дорог являются различные типы автомобилей: легковые, автобусы, грузовые, автопоезда, мотоциклы, тракторы и тракторные поезда, сельскохозяйственная техника, гужевые повозки. Для гусеничных машин и гужевых повозок используются специальные дороги, прокладываемые параллельно основным и специально устраиваемые тракторные пути.
Расчет обеспечиваемых дорогой скоростей движения выполняют на наиболее совершенные и распространенные автомобили массового производства (в СССР это были «ВАЗ», «Волга» и «ЗИЛ»). Многие современные дороги запроектированы на эти типы автомобилей.
Требования к габаритным размерам автомобилей ограничивают их высоту 4 м (3,8м – для дорог V категории), ширину 2,5 м, длину 12 м для одиночного грузового автомобиля или с одним прицепом, 20 м для трехосного тягача с одним прицепом и 24 м для трехосного тягача с двумя двухосными прицепами (рис. 3.1).

Рис. 3.1. Предельные габаритные размеры автомобилей и автопоездов, допускаемых к движению на дорогах: а, б – грузовой автомобиль; в – двухосный седельный тягач с полуприцепом; г – трехосный тягач с двухосным прицепом; д – трехосный тягач с двумя двухосными прицепами
В современной дорожной практике принято проектировать дороги с интенсивным движением на автомобили с нагрузкой на одиночную ось 100 кН, а при двух спаренных осях – 180 кН (автомобили группы А), остальные дороги – соответственно на 60 и 100 кН (автомобили группы Б). Это создает затруднения при организации перевозок, так как ограничивает возможность использования большегрузных автомобилей на многих дорогах, а при случайных заездах приводит к ускоренному их разрушению.
Отдельные автомобили, различные по типам, степени загрузки и техническому состоянию, следуя в одном направлении с разными скоростями по самостоятельным маршрутам, образуют на дороге транспортный поток. Очевидно, что чем больше автомобилей движется в потоке, тем более высокие требования должны быть предъявлены к устройству дороги. При обосновании требований к разным элементам дороги используют различные характеристики транспортного потока. Для назначения числа полос движения автомобилей при обосновании ширины земляного полотна и проезжей части решающее значение имеет количество автомобилей, проходящих по дороге за определенный срок, а не их нагрузка. Поэтому за основную характеристику движения по дорогам принимают общее количество автомобилей, проходящих через некоторое сечение дороги за единицу времени (сутки, час), называемое интенсивностью движения.
Обычно при оценке условий работы дороги интенсивность движения выражают в фактическом количестве проходящих автомобилей, суммируя автомобили независимо от их типов. В этом есть условность, так как проезд по дороге с малой скоростью нескольких автопоездов с тяжелыми прицепами неэквивалентен по продолжительности проезду равного числа быстроходных легковых автомобилей. Иногда для уточнения в составе движения указывают долю легковых, грузовых автомобилей и автобусов.
Поэтому для характеристики количества автомобилей, которые дорога может пропустить, фактическую интенсивность движения обычно приводят к эквивалентному количеству легковых автомобилей. Для этого вводят коэффициенты приведения, характеризующие, сколько легковых автомобилей могло бы проехать по участку дороги за время проезда одного грузового автомобиля или автопоезда. На эти коэффициенты умножают число автомобилей каждого типа и получают приведенную интенсивность движения. Согласно СНИП 2.05.02-85 при определении приведенной интенсивности движения используют коэффициенты, приведенные в табл. 3.1.
Таблица 3.1. Коэффициенты приведения к легковому автомобилю
| Типы транспортных средств | Коэффициент приведения |
| Легковые автомобили | 1,0 |
| Мотоциклы с коляской | 0,75 |
| Мотоциклы и мопеды | 0,5 |
| Грузовые автомобили грузоподъемностью, т: | |
| 1,5 | |
| 2,0 | |
| 2,5 | |
| 3,0 | |
| св. 14 | 3,5 |
| Автопоезда грузоподъемностью, т: | |
| 3,5 | |
| 4,0 | |
| 5,0 | |
| св. 30 | 6,0 |
Примечания: 1. При промежуточных значениях грузоподъемности транспортных средств коэффициенты приведения следует определять интерполяцией. 2. Коэффициенты приведения для автобусов и специальных автомобилей следует принимать как для базовых автомобилей соответствующей грузоподъемности.
3. Коэффициенты приведения для грузовых автомобилей и автопоездов следует увеличивать в 1,2 раза при пересеченной и горной местности.
Интенсивность движения меняется по длине отдельных участков дороги и, увеличиваясь вблизи городов, крупных населенных пунктов и железнодорожных станций, имеет наименьшее значение на средних участках маршрутов (рис. 3.2а). Интенсивность движения непостоянна в течение суток и резко снижается в ночное время (рис. 3.2б). Не остается она постоянной и в течение года и дней недели. На дорогах сельскохозяйственных районов в периоды уборки урожая объем перевозок и интенсивность движения значительно возрастают (рис. 3.2в). В праздничные дни движение грузовых автомобилей уменьшается, а легковых, наоборот, увеличивается. В связи с отмеченными частыми колебаниями интенсивности движения на дорогах ее можно надежно характеризовать только средними значениями за расчетный период времени.

Рис. 3.2. Изменение интенсивности движения по дорогам: а – интенсивность движения на разных участках маршрутов на подходах к городу; б – изменение в течение суток интенсивности движения; в – изменение объема перевозок в течение года; 1 – среднесуточная среднегодовая интенсивность; 2 – перевозки зерна в сельскохозяйственных районах; 3 – вывозка сахарной свеклы
При проектировании дорог движение чаще всего характеризуют средним за год количеством автомобилей, проезжающих по участку в сутки, называемым среднегодовой суточной интенсивностью движения.
Интенсивность не является исчерпывающей характеристикой движения. Для решения некоторых задач проектирования и эксплуатации автомобильных дорог используют ряд других характеристик. Так, например, для расчета толщины дорожной одежды имеет значение не только количество, но и размер нагрузок. Один проезд тяжелого автомобиля оказывает на дорогу более разрушительное воздействие, чем проход большого числа легких автомобилей. Это обстоятельство учитывают пересчетом фактической интенсивности движения в эквивалентную приведенную интенсивность движения одного из тяжелых автомобилей, принимаемого за расчетный.
В последнее время практикуется использование прогрессивных методов оценки интенсивности движения. Например, в Бельгии, разработана и практически применена система определения интенсивности движения автомобилей с использованием технологии автоматического подсчета включенных мобильных телефонов, проезжающих через определенное сечение дороги. При этом, если в автомобиле их несколько, срабатывает система корректировки, исключая крупные ошибки на основании оценки расстояния между мобильными аппаратами.
При проектировании дорог промышленных предприятий, где движение легковых автомобилей практически отсутствует, транспортный поток характеризуют грузонапряженностью – массой нетто перевозимых за год грузов (в млн. т). Для детальной характеристики состава автомобили обычно делят на 4 основные категории: особой малой грузоподъемности – до 1 т, малой – от 1 до 2 т; средней – 2 до 5 т и большой – свыше 5 т.
Все это и обуславливает необходимость оперирования понятием нормативная нагрузка– нагрузка, устанавливаемая для целей расчета, нормами для каждого вида сооружения с учетом коэффициента условий работы.
3.2. Сопротивление движению автомобиля
Все элементы современной автомобильной дороги должны обеспечивать возможность безопасного движения автомобилей с расчетной скоростью. Чем выше интенсивность движения по дороге, тем большие взаимные помехи испытывают автомобили, и скорость их движения снижается. Поэтому требования к отдельным элементам трассы дороги устанавливают из условия движения по дороге одиночного автомобиля.
Движущийся автомобиль испытывает сложную систему перемещений:
– поступательное движение на прямых;
– вращение вокруг вертикальной оси при движении по закруглениям;
– колебания в продольном и поперечном направлениях, вызываемые наездами колес на неровности покрытия и т. д.
Не все эти особенности движения пока еще могут быть в полной мере учтены при проектировании дорог. Поэтому при обосновании требований к элементам дороги в плане и профиле условно допускают, что автомобиль движется без колебаний по ровной, твердой поверхности. Фактический режим движения автомобиля по дороге определяется тремя факторами:
1) эксплуатационными свойствами автомобилей;
2) дорожными условиями, обеспечивающими возможность развить ту или иную скорость;
3) индивидуальными особенностями водителей, избирающих в зависимости от восприятия ими дорожных условий наиболее удобную для себя скорость.
Сила тяги, развиваемая двигателем на ведущих колесах автомобиля, расходуется на преодоление сил сопротивления движению. В наиболее общем случае ускоренного движения на подъем на автомобиль действуют следующие силы сопротивлений (рис. 3.3):
– сопротивление качению (трение качения) Рf;
– сопротивление движению на подъем Рi;
– сопротивление воздуха Pw;
– инерционные силы самого автомобиля и вращающихся масс его механизмов Pj, возникающие при изменении скорости движения.
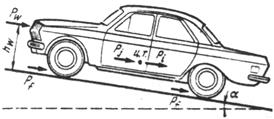
Рис. 3.3. Силы сопротивления движению, действующие на автомобиль
Силы сопротивления качению и сопротивления воздушной среды всегда действуют на движущийся автомобиль. Сопротивления движению на подъем и силы инерции в зависимости от продольного профиля дороги и режима движения автомобиля могут или отсутствовать, или даже иметь отрицательный знак, способствуя движению (например, при спуске под гору или при торможении).
Сопротивление качению вызывается затратой энергии на деформацию шин и дороги. На ровных цементобетонных и асфальтобетонных покрытиях основным фактором, определяющим сопротивление качению, является обжатие шин. На менее ровных покрытиях (щебеночных, гравийных, булыжных мостовых) добавляются наезды колес на неровности покрытия. На грунтовых дорогах с мягкой поверхностью сопротивление создается затратой усилий на деформирование шины и грунта при образовании колеи.
При движении по дорогам с твердыми покрытиями сопротивление качению прямо пропорционально давлению на дорогу
 , (3.1)
, (3.1)
где Gi – нагрузка на дорогу от отдельных колес, Н; fi – коэффициенты сопротивления качению.
При движении по деформирующимся грунтовым поверхностям с образованием колеи существует более сложная зависимость между коэффициентом сопротивления качению и нагрузкой на колесо
 , (3.2)
, (3.2)
где x – коэффициент, меняющийся от 0,75 до 1,0 в зависимости от состояния грунта (более влажному грунту соответствует большее значение); H – глубина колеи после прохода данного колеса, м; D – диаметр колеса, м.
Обычно коэффициент сопротивления качению относят к общему весу автомобиля, т. е. считают
 , (3.3)
, (3.3)
где SPf – суммарное сопротивление качению всех колес автомобиля, Н; Gавт – вес автомобиля, Н.
Сопротивление качению зависит от ровности покрытия, скорости и эластичности шины. Однако при скоростях движения ниже 50 км/ч сопротивление качению возрастет настолько медленно, что коэффициент сопротивления качению можно считать практически постоянным (табл. 3.2).
Таблица 3.2. Значения коэффициента сопротивления качению f
| Покрытие | Значение f |
| Цементобетонное и асфальтобетонное | 0,01–0,02 |
| Из щебня или гравия, обработанных органическими вяжущими материалами, с ровной поверхностью | 0,02–0,025 |
| Из щебня или гравия, не обработанных вяжущими, с небольшими выбоинами | 0,03–0,04 |
| Булыжная мостовая | 0,04–0,05 |
| Грунтовая дорога, ровная, сухая и плотная | 0,03–0,06 |
| Пашня, переувлажненный заболоченный грунт, сыпучие пески | 0,15–0,30 |
При скоростях, близких к расчетным, для дорог с ровной, твердой поверхностью можно принимать, что коэффициент сопротивления качению при скорости V (60<V<150 км/ч) подчиняется зависимости
 , (3.4)
, (3.4)
где fo – коэффициент сопротивления качению при скоростях до 60 км/ч.
Аэродинамическое сопротивление воздушной среды движению автомобиля вызывается:
1) лобовым сопротивлением, которое обусловлено разностью давления воздуха спереди и сзади движущегося автомобиля;
2) трением воздуха о боковую поверхность автомобиля;
3) сопротивлением, создаваемым выступающими частями автомобиля – крыльями, зеркалами, номерными знаками и др.;
4) затратой мощности на завихрение воздушных струй за автомобилем, около колес и под кузовом;
5) сопротивлением воздуха, проходящего через радиатор и подкапотное пространство.
В результате неравномерного обтекания и образования завихрений давление воздуха на поверхность движущегося автомобиля неравномерно. Имеются зоны повышенного давления (радиатор, лобовое стекло) и разряжения (капот, днище, крыша и задняя часть автомобиля) (рис. 3.4).
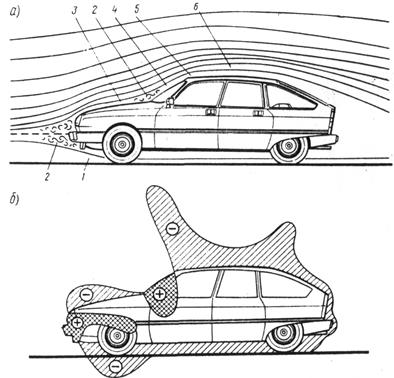
Рис 3.4. Распределение давления воздуха на автомобиль: а – картина обтекания движущеюся автомобиля воздухом; б – эпюра распределения давления по вертикальной плоскости симметрии;
1 – нижний поток воздуха; 2 – зовы повышенного давления; 3 – участок отрыва воздушных струй; 4 – прилипание воздушных струй; 5 – зона разрежения при большой скорости; 6 –верхний поток воздуха (знаком «+» обозначены зоны повышенного давления; знаком «–» – зоны разрежения).
Суммарная сила сопротивления воздуха движению автомобиля (в Н) выражается формулой аэродинамики
 , (3.5)
, (3.5)
где с – коэффициент сопротивления среды (безразмерная величина, зависящая от формы тела, движущегося в воздухе, а также от гладкости его поверхности); r – плотность воздуха, равная на уровне моря 0,125 Н×с2/м4; w – площадь проекции автомобиля на плоскость, перпендикулярную направлению его движения («лобовая площадь»), м2; V – скорость движения автомобиля относительно воздушной среды, км/ч; при попутном ветре V=Vавт-Vв, при встречном ветре V=Vавт+Vв.
Произведение с×r при тяговых расчетах автомобилей заменяют коэффициентом сопротивления воздуха Кв, определяемым экспериментально (табл. 3.3).
Таблица 3.3. Значения коэффициента сопротивления воздуха Кв
| Автомобиль | Кв, Н×с2/м4 | w, м2 |
| Грузовой | 0,60-0,70 | 3,0-7,0 |
| Автобус с кузовом вагонного типа | 0,25-0,50 | 4,5-7,0 |
| Легковой | 0,15-0,30 | 1,4-1,6 |
| Обтекаемый спортивный, гоночный | 0,10-0,15 | 1,0-1,5 |
Площадь лобовой проекции вычисляют по приближенным формулам: для современных легковых автомобилей w=0,8ВН; для автобусов и грузовых автомобилей с кузовом фургон w=0,9ВН (где В, Н – габаритные ширина и высота автомобилей, м).
Сопротивление движению на подъем с уклоном i создается в результате необходимости дополнительных затрат энергии на перемещение автомобиля по наклонной поверхности дороги на некоторую высоту. Для перемещения автомобиля по участку подъема длиной L на высоту Н нужна работа на преодоление силы тяжести F=GH. Пренебрегая разницей между фактической длиной наклонного участка дороги и его горизонтальной проекцией, несущественной для допускаемых на автомобильных дорогах продольных уклонов, можно выразить сопротивление движению на подъем на единицу пути
 . (3.6)
. (3.6)
Сопротивление инерционных сил автомобиля, возникающее при изменении его скорости, слагается из сил инерции поступательного движения и инерционных моментов вращающихся частей автомобиля. При массе автомобиля m=G/g и скорости автомобиля V (в м/с) инерционная сила поступательного движения
 , (3.7)
, (3.7)
где dV/dt – ускорение автомобиля;  – относительное ускорение.
– относительное ускорение.
Наряду с инерцией поступательного движения при изменении скорости движения возникает инерция вращающихся частей автомобиля (колес, маховиков, механизмов трансмиссии). Для ее учета к инерции поступательного движения обычно вводят поправочный коэффициент учета вращающихся масс dвр, который представляет собой отношение полной силы, необходимой для разгона всех поступательно движущихся вращающихся частей автомобиля, к силе, необходимой только для разгона поступательно движущихся масс
 . (3.8)
. (3.8)
Поэтому окончательное выражение для инерционной силы автомобиля имеет вид
 . (3.9)
. (3.9)
Чем больше передаточное число коробки передач, тем выше значение коэффициента dвр. Для прямой передачи коэффициент колеблется в пределах 1,03-1,07, при других передачах увеличивается примерно по зависимости
 , (3.10)
, (3.10)
где n – коэффициент, равный 0,03-0,05 для легковых автомобилей и 0,06-0,07 для грузовых; iк – передаточное число коробки передач.
3.3. Динамические характеристики автомобиля
Механическая энергия, вырабатываемая двигателем автомобиля, передается через трансмиссию автомобиля на его ведущие колеса. Вращающий момент колеса Мвр вызывает появление пары сил. Одна из них окружная сила Рк, приложенная к площадке контакта шины с покрытием, передаваясь на покрытие, как бы стремится сдвинуть его верхний слой в сторону, противоположную движению, вторая сила – тяговое усилие Рр – передается через ведущий мост и рессоры на раму автомобиля и вызывает его движение (рис 3.5).
Тяговое усилие определяется по формуле
 , (3.11)
, (3.11)
где rк=l×ro – радиус качения ведущих колес с учетом обжатия шины в зове контакта с покрытием (рис. 3.5).Коэффициент деформации шины l на твердой поверхности составляет 0,945-0,950 для пневматических шин высокого давления, применяемых на грузовых автомобилях, и 0,930-0,935 для шин низкого давления.

Рис. 3.5. Вращающий момент Мвр, окружная сила Рк и тяговое усилие Рр на колесах автомобиля
Вращающий момент на ведущих колесах Мвр (в Н×м) может быть определен как произведение момента двигателя Ме на передаточные числа трансмиссии и механический коэффициент полезного действия (рис. 3.6)
 , (3.12)
, (3.12)
где iк – передаточное число коробки передач; iо – передаточное число главной передачи; h – механический коэффициент полезного действия трансмиссии автомобиля, учитывающий потери энергии на преодоление сопротивлений во всех механизмах от двигателя до ведущих колес. Примерные значения к.п.д. трансмиссии составляют для двухосных грузовых автомобилей и автобусов 0,9, для трехосных грузовых автомобилей – 0,8, для легковых автомобилей – 0,92.
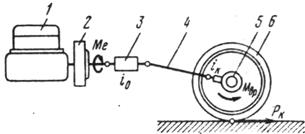
Рис. 3.6. Схема передачи вращающего момента двигателя на колеса автомобиля: 1 – двигатель;
2 – маховик и сцепление; 3 – коробка передач; 4 – карданный вал; 5 – главная передача; 6 – шина
Отсюда тяговое усилие (в Н)
 . (3.13)
. (3.13)
Учитывая, что вращающий момент, развиваемый двигателем, связан с его мощностью Ne (в Вт) и частотой вращения коленчатого вала nе (в об/мин) зависимостью Me=Ne/ne, выражение (3.13) можно привести к виду
 . (3.12)
. (3.12)
Каждой частоте вращения коленчатого вала nе соответствует строго определенная скорость движения автомобиля, выражаемая:
в метрах в секунду (в м/с)
 ; (3.14)
; (3.14)
в километрах в час (в км/ч)
 . (3.15)
. (3.15)
При постоянной скорости вращения коленчатого вала использование понижающих передач приводит к увеличению тяговой силы при соответствующем уменьшении скорости автомобиля. Поэтому при движении автомобиля по хорошей дороге, когда сопротивление качению мало, используется прямая передача (iк=1). При движении на подъем и по плохой дороге переходят на низшие передачи.
Мощность Ne и вращающий момент Ме, развиваемые двигателем, зависят от частоты вращения коленчатого вала. Эти зависимости характеризуются экспериментальным графиком внешней скоростной характеристики двигателя (рис. 3.7), который обычно получают путем испытания двигателей при полном открытии дроссельной заслонки карбюратора в карбюраторных двигателях или полной подаче топливного насоса в дизелях. Поэтому график внешней скоростной характеристики позволяет оценить максимальную мощность, которую может развивать двигатель при той или иной частоте вращения коленчатого вала.

Рис. 3.7. Внешние скоростные характеристики двигателей некоторых автомобилей
Условие равенства внешних и внутренних сил (уравнение движения автомобиля) выражается зависимостью
 , (3.16)
, (3.16)
где Pp – тяговое усилие автомобиля, Н; Pf – сопротивление качению; Pi – сопротивление движению на подъем; Рw – сопротивление воздуха движению; Рj – сопротивление инерционных сил.
Перенося сопротивление воздушной среды, зависящее от скорости движения, в левую часть уравнения и подставив значения сопротивлений из формул (3.3), (3.6) и (3.7), получим
 . (3.17)
. (3.17)
Академик Е. А. Чудаков предложил характеризовать тяговые или динамические качества автомобиля динамическим фактором – разницей между полной силой тяги на ведущих колесах и сопротивлением воздушной среды, отнесенной к единице веса автомобиля:
 . (3.18)
. (3.18)
Динамический фактор характеризует запас тягового усилия на единицу веса автомобиля, движущегося со скоростью V, который может быть израсходован на преодоление дорожных сопротивлений f±i и на ускорение автомобиля j.
Как сила тяги, так и сопротивление воздуха зависят от скорости движения. Поэтому значение динамического фактора не остается постоянным при изменении скорости. График зависимости динамического фактора от скорости движения при полной нагрузке на автомобиль, называемый динамической характеристикой (рис. 3.8), используется при тяговых расчетах на автомобильных дорогах как основной показатель тяговых качеств автомобилей.
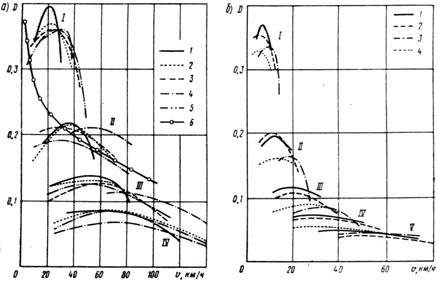
Рис. 3.8. Примеры динамических характеристик автомобилей: а – легковые автомобили:1 –ЗАЗ-968 «Запорожец»; 2 – ВАЗ-2103 «Жигули»; 3 – ГАЗ-24 «Волга»; 4 – ГАЗ-13 «Чайка»; 5 – «Москвич-2140»; 6 – ЗИЛ-111; б – грузовые автомобили: 1 – KaMA3-5320 с полуприцепом; 2 – ЗИЛ-130;
3 – ГАЗ-53А; 4 – ГАЗ-51А; I-V – передачи
Графики динамических характеристик обычно строят применительно к случаю полной загрузки автомобилей
 . (3.19)
. (3.19)
При изменении нагрузки на автомобиль стоящее в числителе (3.19) выражение не меняется, поскольку оно зависит только от скорости движения. Поэтому при постоянной скорости соблюдается соотношение
 . (3.20)
. (3.20)
Отсюда  , т. е. при неполной загрузке автомобиля его динамический фактор обратно пропорционален сумме полезной нагрузки на автомобиль и его собственного веса G1.
, т. е. при неполной загрузке автомобиля его динамический фактор обратно пропорционален сумме полезной нагрузки на автомобиль и его собственного веса G1.
При необходимости учета степени загрузки автомобилей при расчетах скоростей движения по предложению проф. Н. А. Яковлева к графику динамических характеристик пристраивают вспомогательную номограмму нагрузок (рис. 3.9).

Рис. 3.9. Дополнительная номограмма для учета нагрузки на автомобиль при расчетах по динамическим характеристикам: I-III – передачи
3.4. Сцепление шин с поверхностью дороги
Тяговое усилие на колесах автомобиля, обеспечиваемое мощностью двигателя, может быть развито лишь в том случае, если между ведущими колесами и дорогой имеется достаточное сцепление. Отношение максимального тягового усилия на колесе Рк к вертикальной нагрузке на покрытие Gк, при превышении которого начинается пробуксовывание ведущего колеса или проскальзывание заторможенного, называется коэффициентом сцепления (j) и соответственно j=Pк/Gк.
В зависимости от направления сдвигающей силы, действующей на колесо, различают два вида коэффициента сцепления:
1) коэффициент продольного сцепления jпр, соответствующий началу проскальзывания заторможенного или пробуксовывания движущегося колеса при качении или торможении без действия на колесо боковой силы. Его используют при вычислении пути, проходимого автомобилем при экстренном торможении и при оценке возможности трогания автомобиля с места;
2) коэффициент поперечного сцепления jпоп – поперечная составляющая коэффициента сцепления при смещении ведущего колеса, катящегося под воздействием боковой силы под углом к плоскости качения, когда колесо, вращаясь, скользит вбок. Коэффициент jпоп характеризует устойчивость автомобиля при проезде кривых малых радиусов.
Многочисленные экспериментальные исследования коэффициентов сцепления показали, что на их значение большее влияние оказывает состояние дорожного покрытия, чем его тип.
При любых покрытиях выступающие над их поверхностью твердые минеральные частицы, которые делают покрытие шероховатым, при наезде колеса вдавливаются в резину протектора. При проскальзывании колеса они упруго деформируют резину, сопротивление которой является основной причиной сопротивления колеса смещению по покрытию. По мере износа шероховатость покрытия уменьшается, а, следовательно, уменьшается и сцепление его с колесом. Впадины на поверхности покрытия между выступами шероховатости при увлажнении или загрязнении заполняются грязью, пылью, продуктами износа шин и т.д., что уменьшает возможную глубину вдавливания выступов в резину. Пленка влаги, смачивая зону контакта между шиной и покрытием, действует как смазка, разделяющая резину и покрытие. Все это снижает значение коэффициента сцепления. При высоких скоростях движения шина не успевает полностью деформироваться, так как продолжительность контакта с покрытием для этого недостаточна, а, следовательно, неровности покрытия вдавливаются в шину на меньшую глубину. В результате с ростом скорости коэффициент сцепления снижается. На сухих покрытиях снижение коэффициента сцепления со скоростью менее ощутимо, чем на увлажненных.
При сильном износе или при малой высоте и расчлененности элементов протектора на мокром покрытии может возникать явление аквапланирования, когда между шиной и покрытием в начальной части зоны контакта накапливается вода, не успевающая выжаться в стороны. Под шиной образуется водяной клин, создающий гидродинамическую подъемную силу, снижающую давление колеса на дорогу (рис. 3.10). При слое воды на покрытии толщиной 2-3 мм нарушение контакта передних колес с покрытием и потеря управляемости автомобилем становятся возможными при скоростях, близких к 80-100 км/ч.
В среднем можно считать, что коэффициент продольного сцепления jпр полностью заблокированных шин, имеющих слабоизношенный протектор, и гладкого влажного цементобетонного покрытия следующим образом зависит от скорости:
V, км/ч 30 40 60 80 100 120 150 175;
jпр 0,50 0,45 0,39 0,35 0,32 0,29 0,26 0,24.
Коэффициенты продольного сцепления при скорости 60 км/ч в зависимости от состояния покрытия и приведены в табл. 3.4.
Условия сцепления пневматических шин с поверхностью дороги связаны с погодными условиями. Значения коэффициента сцепления меняются в течение года в широких пределах, повышаясь летом и значительно снижаясь в период зимних гололедов, когда для увеличения сцепления дорогу обрабатывают противогололедными материалами (гигроскопическими солями, песком, шлаком и др.) и на колеса автомобилей монтируют зимние шины.
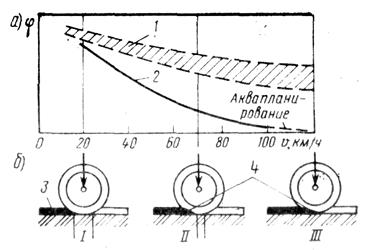
Рис. 3.10. Схема возникновения аквапланирования колес: а – принципиальная зависимость коэффициента сцепления шины с мокрым покрытием, б – схема уменьшения зоны контакта шины с мокрым покрытием при увеличении скорости; 1 – шины с новым протектором; 2 – изношенные шины; 3 – пленка воды >1 мм; 4 – водяной клин, образующийся под шиной; I – полная зона контакта колеса с покрытием; II – уменьшенная зона контакта; III – зона контакта отсутствует, возникло аквапланирование
Таблица 3.4. Значения коэффициентов продольного сцепления jпр при скорости 60 км/ч
| Покрытие | Значение jпр |
| Сухое шероховатое | 0,7 и более |
| Сухое гладкое | 0,6 |
| Влажное | 0,5 |
| Мокрое | 0,4-0,3 |
| Грязное | 0,2-0,3 |
| Обледенелое | 0,1-0,05 |
При обосновании геометрических элементов трассы исходят из значения коэффициента продольного сцепления при сухом чистом покрытии и скорости 60 км/ч jпр=0,6.
В увлажненном состоянии укладываемые на разных участках дорог покрытия должны удовлетворять при той же скорости требованиям, приведенным в табл. 3.5.
Таблица 3.5. Условия движения автомобилей
| Условия движения | Характеристика участков дорог | jпр, не менее |
| Легкие | Прямые участки, кривые с радиусами более 1000 м, продольные уклоны не более 30‰ при укрепленных обочинах, без пересечений в одном уровне при малой интенсивности движения. | 0,45 |
| Затрудненные | Участки с кривыми в плане с радиусами 250-1000 м, с продольными уклонами от 30 до 60‰. Дороги со средней интенсивностью движения. | 0,50-0,45 |
| Опасные | Участки с недостаточной видимостью, с уклонами, превышающими расчетный, зоны примыканий и пересечений в одном уровне. Дороги с высокой интенсивностью движения. | 0,60 |
Условия сцепления ведущих колес с поверхностью дороги оказывают влияние на динамические возможности автомобиля. При малых коэффициентах сцепления большие тяговые усилия, обеспечиваемые мощностью двигателя, не могут быть использованы из-за недостатка сцепления между колесами и покрытием. Поэтому наряду с динамическими характеристиками по мощности двигателя при тяговых расчетах используются также динамические характеристики по условиям сцепления, получаемые из уравнения тягового баланса при замене в уравнении (3.17) силы тяги Рр по мощности двигателя ее максимальным значением, возможным по условиям сцепления шины с покрытием Рр=G¢×jпр, т. е.
 , (3.21)
, (3.21)
где G' – нагрузка от ведущих колес на дорогу; Кв – коэффициент сопротивления воздуха; V – скорость движения автомобиля, км/ч.
Относя избыток сцепления над сопротивлением воздушной среды к единице веса автомобиля, получим выражение динамической характеристики по сцеплению
 . (3.22)
. (3.22)
График динамических характеристик по условиям сцепления, пример которого дан на рис. 3.11, строят для ряда значений коэффициента сцепления jпр. Совмещение его с графиком динамических характеристик по силе тяги позволяет выделить зоны, при которых обеспечивается возможность полного использования силы тяги.

Рис. 3.11. Динамические характеристики автомобиля: 1 – по силе тяги; 2 – по сцеплению (цифры у пунктирных кривых – коэффициенты сцепления)
3.5. Продольные уклоны, преодолеваемые автомобилем
График динамических характеристик дает возможность решить ряд задач по исследованию условий движения автомобиля по дороге (рис. 3.12).

Рис. 3.12. График динамических характеристик, используемый для тяговых расчетов
Дата добавления: 2015-06-05; просмотров: 3622;