Определение длины пути, на котором при увеличении или уменьшении продольного уклона происходит изменение скорости автомобиля от Vi1 до Vi2,, соответствующей новому уклону. 2 страница
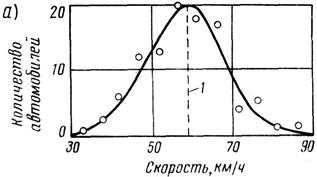
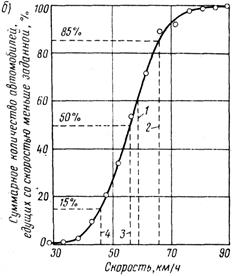
3) обеспеченность 50% выражает среднюю скорость транспортного потока. Ее принимают за основную характеристику режима движения транспортного потока;
4) изгиб верхней части кривой, примерно от 85%-ной обеспеченности, выделяет наиболее быструю группу автомобилей, в число которой входят и автомобили, нарушающие требования безопасности движения.
| 
|
Рис. 4.2. Закономерности распределения движения между автомобилями в транспортном потоке: а – кривая распределения скоростей для однородного транспортного потока; б – кумулятивная кривая; 1 – наиболее характерная (модальная) скорость; 2 – скорость 85%-ной обеспеченности;
3 – средняя скорость; 4 – скорость 15%-ной обеспеченности
Поэтому за наибольшую скорость движения автомобилей, для которой должна быть обеспечена безопасность, принимают обычно скорость 85%-ной обеспеченности, которая является основной при разработке мер по организации движения.
Если транспортный поток складывается из нескольких групп автомобилей, которые обладают резко отличающимися динамическими качествами, но при сравнительно малой интенсивности движения практически не влияют на условия движения друг друга, кривые распределения для потока в целом являются суммой кривых для отдельных составляющих его групп и могут иметь несколько вершин (рис. 4.3).
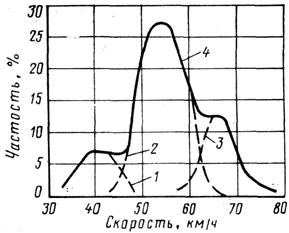
Рис. 4.3. Кривая распределения скоростей для потока разнотипных автомобилей:1 – кривая распределения скоростей для медленно движущихся автомобилей и автопоездов; 2 – то же для основной массы грузовых автомобилей; 3 – то же для легковых автомобилей; 4 – суммарная кривая распределения для транспортного потока
Для проектирования пересечений и примыканий дорог, а также разработки мероприятий по организации движения имеет значение интервал во времени между проходами следующих друг за другом автомобилей. При малых интенсивностях (до 200 авт/ч по одной полосе) распределение интервалов по времени близко к распределению Пуассона, при высоких (до 650 авт/ч) – к распределению Пирсона III типа (рис. 4.4).
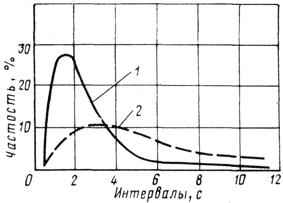
Рис. 4.4. Кривые распределения величин интервалов между проходами автомобилей во времени:
1 – распределение Пуассона (при низкой интенсивности движения); 2 – распределение Пирсона III типа при высокой интенсивности
Характеристикой потоков движения также является плотность транспортного потока – количество автомобилей, приходящееся на единицу длины однородного по транспортным качествам участка дороги, обычно протяженностью 1 км q=N/V, где N – интенсивность движения, авт/ч; V – скорость движения, км/ч.
Характерно, что одной интенсивности движения, кроме точки максимума, соответствуют два значения плотности транспортного потока. В одном случае он состоит из быстрых автомобилей, едущих с большими дистанциями между ними, в другом – из более медленных автомобилей, следующих на меньших расстояниях друг от друга.
Максимум кривой зависимости плотности транспортного потока от его интенсивности (рис. 4.5) соответствует наибольшему количеству автомобилей, которое может пропустить данный участок дороги. Поскольку условия движения по длине дороги меняются, плотность транспортных потоков на разных участках при постоянной интенсивности движения различна.
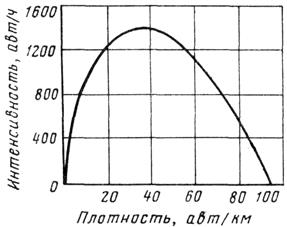
Рис. 4.5. График зависимости между плотностью транспортного потока и его интенсивностью
4.2. Основные теории транспортных потоков
Сложность процессов, протекающих в транспортном потоке, и влияние на скорость каждого автомобиля большого числа факторов не позволяют точно описать режимы движения потока математическими зависимостями. Поэтому высказанные в разное время многочисленные гипотезы теории движения транспортных потоков исходят из рассмотрения упрощенных схем (моделей). Их можно разделить на две основные группы:
1) теории, основанные на динамических моделях потоков автомобилей. Они исследуют расстояния между автомобилями при различных скоростях, следующими друг за другом без обгона по одной полосе проезжей части и распространяют установленные закономерности на весь транспортный поток. Эта схема лучше всего соответствует высоким интенсивностям движения, когда обгоны практически невозможны или сопряжены с большим риском;
2) теории, основанные на вероятностных моделях. Они анализируют движение двух встречных потоков автомобилей в целом, учитывая возможность обгонов с заездом на полосу встречного движения в моменты, когда во встречном потоке имеется достаточное для этого расстояние между автомобилями.
При обосновании требований к дорогам пока еще наибольшее распространение имеет простейшая динамическая модель, которая предполагает, что движение всех автомобилей происходит с равными скоростями и на одинаковом расстоянии друг от друга, зависящем от длины тормозного пути.
Более совершенна динамическая теория «следования за лидером». Она предполагает, что в пределах транспортного потока расстояния между автомобилями не являются постоянными. В каждой паре автомобилей задний движется с ускорением, пропорциональным разности скоростей этих автомобилей:
 , (4.1)
, (4.1)
где Vп, Vз – скорости переднего и заднего автомобилей, м/с; t – время реакции водителя, с.
Так как задний автомобиль в свою очередь является передним для следующего за ним, его ускорение или притормаживание отражается на следующем автомобиле, и в транспортном потоке все время возникают своеобразные волны сгущения и разрежения.
Возможность проведения аналогии между движением транспортного потока и течением по руслу вязкой жидкости привела к появлению «гидродинамической модели», позволяющей исследовать скорость сжатия и растягивания транспортных потоков при возникновении и последующем удалении препятствий на пути потока автомобилей, движущихся с постоянной скоростью.
В дальнейшем должны широкое распространение получить вероятностные модели, учитывающие возможность обгона, поскольку они точнее учитывают реальные условия движения на дороге. Вероятностные модели рассматривают характеристики режима движения каждого автомобиля (скорость, выдерживаемый интервал и выходы на обгон) как случайные события, возникновение каждого из которых в малой степени связано с предшествующими.
Для оценки этих характеристик наиболее широко используется теория массового обслуживания. Основной областью использования вероятностных моделей являются задачи, в которых решаются вопросы взаимодействия потоков средней интенсивности, когда еще возможны обгоны автомобилей, движущихся по различным полосам, например, по пересечениям в одном уровне, участкам слияния и переплетения потоков, а также технико-экономические задачи.
4.3. Пропускная способность дороги
Количество автомобилей, которое может пройти по дороге за определенный отрезок времени, – пропускная способность – зависит от их скорости и степени организованности движения. Поэтому следует ясно представлять, что пропускная способность не является однозначным параметром, характеризующим дорогу, так как может меняться в широких пределах.
Различают следующие виды пропускной способности как характеристики дороги:
1) максимальную теоретическую пропускную способность, определяемую расчетом по формулам динамической задачи теории движения транспортных потоков для идеализированного колонного движения однотипных автомобилей в благоприятных дорожных условиях (прямой горизонтальный участок с сухим шероховатым покрытием);
2) практическую типичную пропускную способность – наибольшее число автомобилей, которое может быть пропущено участком дороги при фактически складывающихся на ней режимах движения транспортных потоков в благоприятных погодных условиях. В СНиП пропускная способность приводится для средних дорожных условий применительно к смешанному транспортному потоку в различных условиях рельефа и выражается числом автомобилей, приведенным к легковым.
Для определения максимальной пропускной способности воспользуемся упрощенной динамической задачей теории транспортных потоков. Рассмотрим пропускную способность полосы движения, по которой следует с соблюдением постоянных расстояний между однотипными автомобилями транспортный поток. Определим минимальное безопасное расстояние между двумя автомобилями в потоке.
1) После того как водитель первого автомобиля по какой-либо причине начинает торможение, задний автомобиль за время реакции водителя, равное 1 с, проходит путь (в м) l1=V/3,6 (где V – скорость автомобиля, км/ч).
2) Вследствие возможного различия в состоянии тормозов переднего и заднего автомобилей тормозной путь первого может оказаться меньшим и тогда задний автомобиль дополнительно к l1 приблизится к переднему на расстояние
 , (4.1)
, (4.1)
где Sз, Sп – тормозные пути заднего и переднего автомобилей; Кз, Кп – коэффициенты эксплуатационного состояния тормозов заднего и переднего автомобилей; V – скорость автомобиля, км/ч.
3) Безопасное расстояние между автомобилями
 , (4.2)
, (4.2)
где lз – запас расстояния между остановившимися автомобилями.
4) Длина участка, приходящегося на один автомобиль на дороге L=S+l4 (где l4 – длина автомобиля).
5) Количество автомобилей, прошедших через рассматриваемое сечение дороги в одном направлении за час (в авт/ч), т. е. пропускная способность полосы движения при скорости V (в км/ч)
 . (4.3)
. (4.3)
В целях лучшего учета режимов движения различные авторы предлагают те или иные допущения о режиме торможения и состоянии тормозов переднего и заднего автомобилей.
Наиболее распространено предположение о мгновенной остановке переднего автомобиля (Кп=0), что можно себе представить как падение с грузового автомобиля какого-либо предмета, наезд на который представляет опасность для следующего за ним автомобиля.
В этом случае
 . (4.4)
. (4.4)
Математическое исследование уравнения (4.4) показывает, что оно имеет максимум пропускной способности в пределах 1100-1600 авт/ч, соответствующий скорости движения 20-40 км/ч. При дальнейшем возрастании скорости пропускная способность медленно снижается (рис. 4.6).
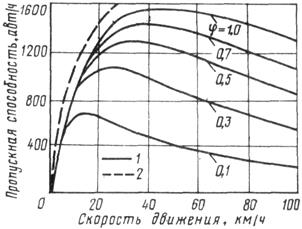
Рис. 4.6. Теоретическая пропускная способность полосы движения при разных значениях коэффициента сцепления: 1 – по уравнению (4.4); 2 – по уравнению (4.5)
Второе допущение исходит из предпосылки об одинаковом состоянии и режиме торможения переднего и заднего автомобилей (Кз = Кп). В этом случае
 . (4.5)
. (4.5)
Согласно уравнению (4.5) пропускная способность дорог возрастает с увеличением скорости и не зависит от коэффициента сцепления. Это предположение может осуществиться только в будущем при введении автоматического управления движением.
Уравнения (4.4) и (4.5), исходящие из схемы упорядоченного движения по одной полосе проезжей части, не отражают реальных условий движения по дороге разнотипных автомобилей с разными скоростями и обгонами, создающими помехи для движения во встречном направлении. С увеличением интенсивности движения взаимные помехи автомобилей возрастают, и средние скорости потока снижаются (рис. 4.7), подчиняясь для дорог с двумя полосами движения при смешанном составе движения эмпирической зависимости
 , (4.6)
, (4.6)
где Vо – скорость движения одиночного автомобиля при отсутствии помех, км/ч, которая зависит от дорожных и погодных условий; N – суммарная интенсивность движения в обоих направлениях, авт/ч; a – коэффициент снижения скорости, который зависит от состава движения (a=0,016 при 20% легковых автомобилей в составе транспортного потока, 0,012 – при 50% и 0,008 – при 80% легковых автомобилей).
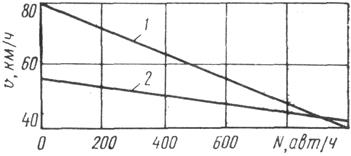
Рис. 4.7. Зависимость средней скорости движения по дороге от интенсивности движения:
1 – только легковые автомобили; 2 – типичный смешанный транспортный поток
Это накладывает ограничение на использование уравнения (4.4), поскольку средняя скорость потока автомобилей, которой соответствует определяемая пропускная способность, должна одновременно удовлетворять и уравнению (4.6). Поэтому, как следует из рис. 4.8, пропускная способность дороги с двумя полосами движения должна соответствовать точке пересечения прямой и кривой, выражаемых уравнениями (4.4) и (4.6) на графике зависимости скорости от пропускной способности.
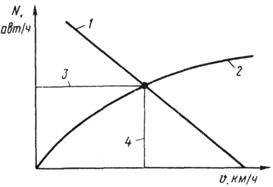
Рис. 4.8. Зависимость пропускной способности дороги от скорости движения транспортного потока: 1 – зависимость скорости транспортного потока от интенсивности; 2 – пропускная способность, рассчитанная по интервалам между автомобилями при разных скоростях движения;
3 – типичная пропускная способность полосы; 4 – скорость при типичной пропускной способности
Поскольку скорости движения по дорогам зависят от степени их технического совершенства, пропускные способности дорог разных категорий определяются точками пересечения с кривой, выражаемой уравнением (4.6), прямых, соответствующих значениям скорости Vо движения по этим дорогам одиночных автомобилей (рис. 4.9).
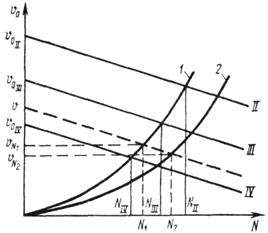
Рис. 4.9. Пропускная способность дорог разных категорий в зависимости от режимов движения:
1 – теоретическая пропускная способность при нормальных условиях движения; 2 – то же при сложных условиях движения; II – IV – скорости движения одиночных автомобилей на дорогах II –IV категорий
Если интенсивность возрастает по сравнению с пропускной способностью, найденной описанным способом, условия движения ухудшаются. Вначале сокращаются расстояния запаса между автомобилями lз, а затем расстояния между автомобилями становятся меньше длины тормозного пути, повышается напряженность работы водителей. В результате кривая теоретической пропускной способности как бы смещается на графике вправо в тем большей степени, чем больше превышает фактическая интенсивность движения пропускную способность, соответствующую нормальным условиям движения (см. рис. 4.9).
При разработке норм на проектирование дорог пропускную способность полосы движения оценивали, используя в уравнении (4.5) установленные путем наблюдений кривые зависимости средней скорости транспортного потока и интервалов между автомобилями от скорости. Полученные значения пропускной способности, представляющие практическую типичную пропускную способность, приведены в табл. 4.1.
Таблица 4.1. Средняя практическая пропускная способность одной полосы движения
| Категория дороги | Средняя практическая пропускная способность одной полосы движения при рельефе, авт/ч | ||
| равнинном | пересеченном | горном | |
| II | |||
| III | |||
| IV | |||
| V |
Они соответствуют состоянию дороги, принятому при разработке Строительных норм и правил на автомобильные дороги – ровная, слегка увлажненная шероховатая поверхность покрытия с коэффициентом сцепления jпр=0,6 при обеспеченной видимости. При ухудшении погодных условий и на участках дорог, не удовлетворяющих требованиям СНиП, пропускная способность снижается.
Из практических методов определения пропускной способности конкретных участков дорог наиболее распространен предложенный проф. В.В. Сильяновым способ с использованием эмпирических коэффициентов снижения пропускной способности b.
Практическую пропускную способность определяют по формуле
 , (4.7)
, (4.7)
где Nmax – максимальная практическая пропускная способность эталонного участка, составляет 2000 авт/ч для двухполосных дорог, 4000 авт/ч – для трехполосных, для многополосных дорог определяется как сумма пропускной способности отдельных полос. Эталонным является горизонтальный участок, прямоугольный в плане, с проезжей частью, имеющей не менее двух полос движения шириной по 3,75 м с сухим шероховатым покрытием, с расстоянием видимости не менее 800 м для транспортного потока из легковых автомобилей; n – количество типов автомобилей в составе транспортного потока; Кпрi – коэффициент приведения автомобиля i-го типа к легковому автомобилю согласно СНиП 2.05.02-85; yi – доля автомобилей i-го типа в составе транспортного потока; bитог – итоговый коэффициент снижения пропускной способности, определяемый как произведение частных коэффициентов bi
 . (4.8)
. (4.8)
Частные коэффициенты снижения пропускной способности bi определяются в зависимости от характеристик дорожных условий и состава транспортного потока по специальным таблицам. Например, b1 изменяется в зависимости от ширины полосы движения от 0,85 до 1,0, а b2 зависит от расстояния от кромки проезжей части до препятствия на обочине (0,78-1,0) и т.д.
4.4. Загрузка дорог движением и пропускная способность полосы движения
Типичная пропускная способность полосы движения характеризует максимальную интенсивность движения при частично связанном режиме транспортного потока с некоторым снижением скорости по сравнению со скоростью одиночных автомобилей.
В зависимости от интенсивности движения по дороге изменяются количество взаимных помех для автомобилей и режимы их движения. Чем меньшая интенсивность по одной полосе проезжей части предусматривается при проектировании дороги, тем большие удобства будут обеспечены для пользующихся дорогой.
Загрузку автомобилями полос движения характеризуют коэффициентом загрузки z, который представляет собой отношение фактической интенсивности движения Nф к практической типичной пропускной способности полосы движения. Различают четыре характерные состояния транспортного потока (табл. 4.2).
Таблица 4.2. Характеристики различных уровней удобства движения
| Уровень удобства движения | Состояние транспортного потока | N, авт/ч на полосе | Коэффициент загрузки z | Скорость потока по отношению к скорости одиночного автомобиля |
| А | Свободный | < 0,20 | 0,90-1,00 | |
| Б | Частично связанный | 0,20-0,45 | 0,70-0,90 | |
| В | Связанный | 0,45-0,70 | 0,55-0,70 | |
| Г | Насыщенный | 0,70-1,00 | 0,40-0,55 |
Расчетный коэффициент загрузки дороги движением при сдаче в эксплуатацию, предусматриваемый при ее проектировании, не должен превышать 0,45-0,55 от ее практической пропускной способности с тем, чтобы к моменту окончания расчетного срока и возникновения потребности в реконструкции дороги он не превышал 0,65-0,75. Тем самым создается резерв пропускной способности на случай внеплановых интенсивных перевозок, а также сезонных и суточных пиков интенсивности движения.
СНиП 2.05.02-85 предусматривает на дорогах II–IV категорий две полосы движения. Для обгона используются полосы встречного движения. При назначении числа полос на многополосных автомобильных магистралях, а также выявлении мест устройства дополнительных полос движения (на подъемах, у пересечений и др.) определяют общее число полос движения
 , (4.9)
, (4.9)
где Nпр – интенсивность движения, авт/ч, приведенная к легковым автомобилям; e – коэффициент сезонной неравномерности движения; z – коэффициент загрузки, соответствующий необходимому для данной дороги уровню удобства; N – типичная пропускная способность дороги данной категории, авт/ч.
Число полос движения на дорогах I категории следует устанавливать в зависимости от интенсивности движения и рельефа местности по табл. 4.3 (СНиП 2.05.02-85).
Таблица 4.3. Число полос движения на дорогах I категории
| Рельеф местности | Интенсивность движения, прив. авт/сут | Число полос движения |
| Равнинный и пересеченный | 14000-40000 | |
| 40000-80000 | ||
| > 80000 | ||
| Горный | 14000-34000 | |
| 34000-70000 | ||
| > 70000 |
Строительство дорог с многополосной проезжей частью обосновывается сопоставлением с вариантами сооружения дорог по раздельным направлениям.
Новые дороги с тремя полосами движения в Беларуси не строят, так как преимущественное использование третьей полосы для обгона создает повышенную опасность столкновения автомобилей. Уширение проезжей части до трех полос движения иногда выполняют в процессе капитальных ремонтов при сильно возросшей интенсивности движения как временное мероприятие, с увеличением впоследствии до четырех полос движения.
4.5. Технические условия на проектирование
Для практического руководства при проектировании дорог разрабатывают нормы на элементы дороги – технические условия, основанные на тяговых расчетах, исходящих из некоторых осредненных условий движения автомобилей по дороге. При этом учитывают перспективы развития автомобильного транспорта, определяя тем самым на ряд лет вперед (20 лет) техническую политику в области дорожного строительства.
Нормы учитывают:
1) динамические качества современных автомобилей;
2) материальные возможности страны;
3) опыт эксплуатации построенных дорог, показывающий, в какой степени ранее принятые решения удовлетворяют требованиям движения;
4) материалы исследования причин дорожно-транспортных происшествий, вызванных дорожными условиями, в частности неудачным сочетанием элементов дороги в плане и профиле.
С 1 января 1986 г. проектирование дорог ведут на основе Строительных норм и правил «Автомобильные дороги» (СНиП 2.05.02-85), утвержденных Государственным комитетом СССР по делам строительства.
Наиболее сложный и принципиальный вопрос при разработке технических нормативов на проектирование дорог – выбор расчетной скорости, т.к. движение с высокими скоростями требует:
1) минимальных продольных уклонов;
2) больших радиусов кривых в плане и продольном профиле;
3) наличия совершенного покрытия;
4) увеличения объемов земляных работ, особенно в сложных условиях рельефа;
5) резкого увеличения стоимости строительства дорог по мере повышения их категории.
Минимум суммарных расходов при каждой интенсивности соответствует определенной, наиболее эффективной расчетной скорости.
В своей практической деятельности инженер должен ясно представлять себе, что требования любых норм и технических условий отражают уровень наших знаний периода их составления. Их нельзя рассматривать как непреложные законы математики или физики, отступление от которых всегда приводит к ошибкам. Тщательно анализируя местные природные условия, закономерности движения, особенности новых типов транспортных средств, свойства местных материалов и т.д., инженер в случае необходимости обязан предложить на рассмотрение органов, утверждающих проекты дорог, обоснованные собственные решения, отличающиеся от нормативных.
5. ЭЛЕМЕНТЫ ПЛАНА АВТОМОБИЛЬНОЙ ДОРОГИ.
ВИДИМОСТЬ ДОРОГИ В ПЛАНЕ
5.1. Элементы плана дороги
Строить дороги по кратчайшему направлению (по прямой, соединяющей заданные точки) препятствуют элементы рельефа земной поверхности (горы, овраги), водные преграды (болота, озера, реки), заповедники и другие препятствия. Нецелесообразно также прокладывать дороги по высокоплодородным землям, ценным для сельского хозяйства. В то же время возникает необходимость проведения дороги через заданные промежуточные пункты и места примыкания к городам, участки, удобные для пересечения рек, железных и автомобильных дорог. Как можно видеть на рис. 5.1, необходимость перейти реку на прямом участке с удобным подходом к мосту по пологим склонам оврага, желание обойти населенный пункт и избежать пересечения оврага заставили при проложении трассы отклониться от кратчайшего прямого направления.
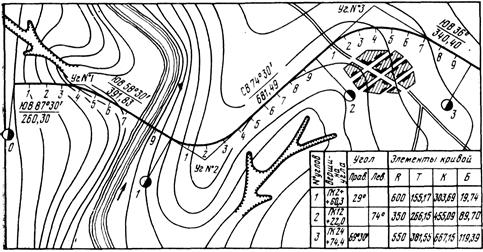
Рис. 5.1. Пример проложения трассы дороги в плане
Удлинение дороги, вызванное введением углов поворота, характеризуют коэффициентом развития, или коэффициентом удлинения, равным отношению фактической длины дороги к длине прямой, соединяющей начальный и конечный ее пункты («воздушной линии»).
Положение геометрической оси дороги на местности называется ее трассой. Поскольку трасса при обходе препятствий, на подъемах на холмы и спусках в понижения местности меняет свое направление в плане и продольном профиле, она является пространственной линией (рис. 5.2.).
Рис. 5.2. Ось дороги как пространственная кривая: а – вид полотна дороги в аксонометрии;
б – план дороги; в – продольный профиль
Графическое изображение проекции трассы на горизонтальную плоскость, выполненное в уменьшенном масштабе, называют планом трассы.
Намечая положение дороги на местности, ее первоначально прокладывают в виде ломаной линии. До 30-х годов прошлого столетия единственной формой трассы была ломаная линия, в углы пересечения которой для удобства и безопасности движения вписывались дуги окружности. Такая трасса с резко изменяющимися элементами (круговые кривые и прямые) и значительной протяженностью этих элементов в условиях холмистого рельефа плохо сочетается с его плавными формами, кажется «жесткой», что приводит к увеличению объемов работ по устройству земляного полотна. Поэтому трассы современных автомобильных дорог, особенно высоких категорий, проектируют с минимальной протяженностью прямых вставок как сочетание дуг окружности с радиоидальными спиралями – клотоидами (клотоидная трасса) или как кривые с непрерывно изменяющейся кривизной, аппроксимируемыми кубическими полиномами (сплайны). В последнем случае участки ломаного, состоящего из прямых, хода являются опорной базой, от которой при разбивке отмеряют вычисляемые на ЭВМ ординаты криволинейной трассы. Особенности клотоидной и сплайновой трасс будут рассмотрены детально при ландшафтном проектировании.
В простейшем случае трассирования дороги прямыми и дугами окружности каждое изменение направления трассы определяется углом поворота, который измеряют между продолжением направления трассы и новым ее направлением. Углы поворота последовательно нумеруют вдоль дороги – по ходу трассы. Чтобы запроектированную трассу можно было точно воспроизвести на местности, ее ориентируют относительно сторон света. Для этого вычисляют румбы прямых участков трассы (см. рис. 5.1).
Различают следующие геометрические элементы закруглений (рис. 5.3): угол a, радиус R, кривую К, тангенс Т, биссектрису Б, домер Д. Элементы кривой связаны между собой следующими тригонометрическими соотношениями:
 ;
;  ;
;  ;
;  ;
;  . (5.1)
. (5.1)
Дата добавления: 2015-06-05; просмотров: 2994;