МЕХАНИЗМОВ
Кинематическая схема механизма дает полное представление о структуре механизма и определяет его кинематические свойства. Она является графическим изображением механизма посредством условных обозначений звеньев и кинематических пар с указанием размеров, которые необходимы для кинематического анализа механизма.
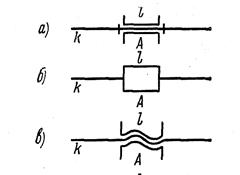
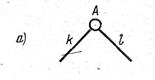
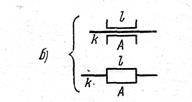
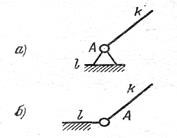
На кинематических схемах механизмов звенья, как правило, изображаются отрезками прямых и нумеруются арабскими цифрами. Кинематические пары в пространственных механизмах обозначаются большими буквами латинского алфавита и схематически изображаются так, как это сделано на рисунке 1.8. Схематическое изображение кинематических пар плоских механизмов показано на рисунке 1.9. Элементы высшей пары очерчиваются кривыми, которыми они характеризуются в натуре. Стойку (неподвижное звено) принято выделять штриховкой (рисунок 1.10).
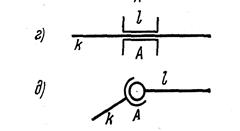
а - вращательная V класса (низшая); б - поступательная V класса (низшая);
в - винтовая V класса (низшая); г - цилиндрическая IV класса (низшая);
д - сферическая III класса (низшая)
Рисунок 1.8 – Схематическое изображение кинематических пар
в пространственных механизмах
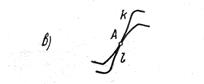
а - вращательная (шарнир) V класса (низшая);
б - поступательная V класса (низшая); в - IV класса (высшая)
Рисунок 1.9 – Схематическое изображение кинематических пар
в плоских механизмах
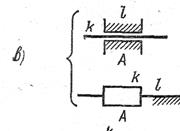
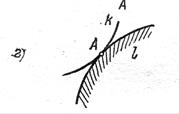
а, б - вращательная кинематическая пара; в - поступательная пара;
г - высшая пара
Рисунок 1.10. – Схематическое изображение неподвижных элементов
кинематических пар
Для построения кинематической схемы механизма рекомендуется следующая последовательность действий.
1. Установить основное кинематическое назначение механизма. Например, механизм на рисунке 1.6 предназначен для преобразования вращательного движения кулачка 1 в поступательное движение толкателя 3.
2. Подсчитать общее число звеньев k, включая стойку. Число n подвижных звеньев будет равно n = k – 1.
3. Выяснить, сколько наложено на подвижные звенья механизма общих условий связи.
4. Подсчитать и установить класс кинематических пар, а также найти степень подвижности механизма.
5. Вычертить схему механизма. Начинать ее надо с нанесения на чертеж неподвижных элементов кинематических пар, т.е. элементов, принадлежащих стойке. Далее следует вычертить ведущие звенья, входящие в кинематические пары со стойкой. (Число этих звеньев соответствует найденной ранее степени подвижности.) Затем надо нанести на чертеж кинематическую цепь, образующую ведомую часть механизма.
|

При составлении схемы плоских механизмов чертеж должен совпадать с плоскостью, параллельно которой движутся точки звеньев механизма. Исключение составляют передачи с цилиндрическими зубчатыми колесами, когда для наглядности схема вычерчивается в плоскости, перпендикулярной плоскости вращения колес.
На рисунке 1.11, a показана схема зубчатой передачи, вычерченная по общим правилам для схем плоских механизмов, а на рисунке 1.11, б – та же передача, вычерченная по правилам для схем передач с цилиндрическими зубчатыми колесами.
Если же исследуемый механизм имеет кинематические пары IV класса, то они предварительно должны быть заменены одним звеном, входящим в две кинематические пары V класса. Получившийся после такой замены механизм называется заменяющим. Такая замена для двух смежных бесконечно малых перемещений не меняет значений перемещений, скоростей и ускорений основного механизма.
На рисунке 1.12 показан способ замены кинематической пары IV класса (высшей) одним звеном, входящим в две пары V класса – точки В и О2.
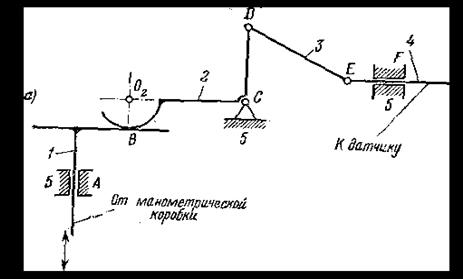
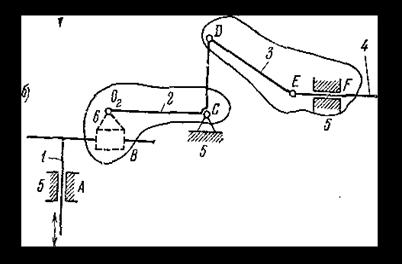
а – основной механизм, б - заменяющий механизм
Рисунок 1.12. - Механизм приемника давления электрического
дистанционного манометра
Рассмотрим еще один пример замены высшей кинематической пары на две низшие. На рисунке 1.13, а изображен основной механизм газораспределения ДВС. В точках В и Е происходит соприкосновение звеньев в пару IV класса (соединение в точке). После замены получились четыре пары V класса – точки О1, О2, О3 и О4 (рисунок 1.13, б).
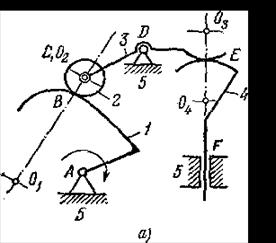
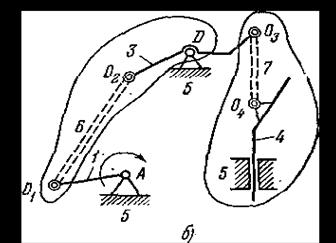
а – основной механизм; б - заменяющий механизм
Рисунок 1.13. - Механизм газораспределения двигателя
внутреннего сгорания (ДВС)
Дата добавления: 2015-06-01; просмотров: 1870;