ПОРЯДОК ПРОВЕДЕНИЯ СТРУКТУРНОГО АНАЛИЗА
1. Изобразить схему механизма. Пронумеровать звенья; нумерация звеньев начинается с того звена, где задано вращение (w1, n1).
2. Рассчитать степень подвижности механизма. По степени подвижности определить количество ведущих звеньев (кривошипов, механизмов I класса). Дать названия звеньям механизма.
3. Выделить механизм I класса (ведущее звено со стойкой) и структурные группы Ассура II, III и т.д. классов.
4. Изобразить структурные группы в том же масштабе, что и механизм, начиная с последней, считая от ведущего звена. Для каждой структурной группы рассчитать степень подвижности (см. формулу 1.2) и изобразить структурную формулу (см. формулу 1.8). Определить класс и вид структурной группы.
5. Изобразить механизм I класса. Рассчитать степень его подвижности, записать структурную формулу.
6. Составить формулу строения всего механизма в порядке присоединения структурных групп к механизму I класса по образцу
 . (1.9)
. (1.9)
7. Определить класс всего механизма. Класс всего механизма определяется по наивысшему классу структурной группы.
Рассмотрим несколько примеров на структурный анализ.
Пример 1.Выполнить структурный анализ механизма соломонабивателя (рисунок 1.16).
а – кинематическая схема механизма;
б - структурная группа 2-3; в – механизм I класса
Рисунок 1.16. - К структурному анализу механизма
соломонабивателя
1. Рассчитываем степень подвижности по формуле (1.2)
 ,
,
где n = 3 (количество подвижных звеньев), р5 = 4 (количество низших кинематических пар V класса (О(1,4); А(1,2); В(2,3); С(3,4)), р4= 0 (количество высших кинематических пар IV класса).
2. W=1, поэтому ведущее звено одно (показано стрелкой). Тогда, 1 звено ОА – кривошип (ведущее), 2 звено АВ – шатун, 3 звено ВС - рычаг (коромысло), 4 звено – стойка (неподвижное).
3. Для структурной группы 2-3 имеем:
 .
.
Структурная формула структурной группы
 1 вид.
1 вид.
4. Для механизма I класса имеем:
 .
.
Структурная формула механизма I класса
 .
.
5. Формула строения всего механизма (1.9)
Þ .
6. Вывод. Данный механизм II класса.
Пример 2.Выполнить структурный анализ механизма привода качающегося конвейера (рисунок 1.17, а).
|
|
|
|
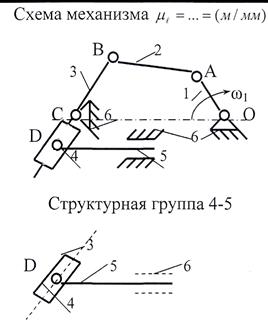
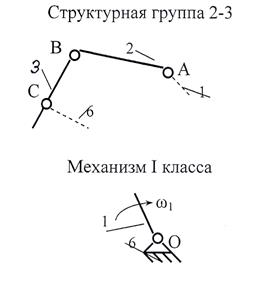
Рисунок 1.17. - К структурному анализу механизма
привода качающегося конвейера
1. Рассчитываем степень подвижности по формуле (1.2)
 ,
,
где n = 5 (количество подвижных звеньев), р5 = 7 (количество низших кинематических пар V класса (О(1,6); А(1,2); В(2,3); С(3,6); D(3,4); D(4,5); D(5,6)), р4 = 0 (количество высших кинематических пар IV класса).
2. W=1, поэтому ведущее звено одно (показано стрелкой). Тогда 1 звено – кривошип (ведущее), 2 звено АВ – шатун, 3 звено ВСD - кулиса, 4 звено - кулисный камень, 5 звено - ползун, 6 звено – стойка (неподвижное).
3. Для структурной группы 4-5 имеем (рисунок 1.17, б):
 .
.
Структурная формула структурной группы 4-5
 4 вид.
4 вид.
4. Для структурной группы 2-3 имеем (рисунок 1.17, в):
.
Структурная формула структурной группы
 1 вид.
1 вид.
5. Для механизма I класса имеем (рисунок 1.17, г):
.
Структурная формула механизма I класса
 .
.
6. Формула строения всего механизма (1.9)
Þ Þ .
7. Вывод. Данный механизм II класса.
Пример 3.Выполнить структурный анализ механизма конхоидографа (рисунок 1.18). Рассмотрим два варианта.
1 вариант. На рисунке 1.18,а едущее звено первое (АВ).
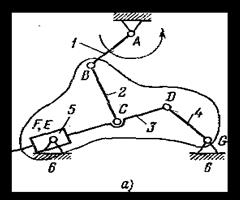
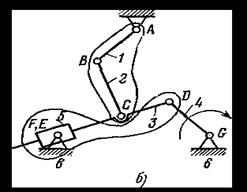
а – ведущее звено первое; б - ведущее звено четвертое
Рисунок 1.18. - К структурному анализу механизма конхоидографа
1. Рассчитываем степень подвижности по формуле (1.2)
,
где n = 5 (количество подвижных звеньев), р5 = 7 (количество низших кинематических пар V класса (А(1,6); В(1,2); С(2,3); D(3,4); G(4,6); E(3,5); F(5,6)), р4 = 0 (количество высших кинематических пар IV класса).
2. W=1, поэтому ведущее звено одно (показано стрелкой). Тогда 1 звено АВ – кривошип (ведущее), 2 звено ВС – шатун, 3 звено DСF - шатун, 4 звено DG – рычаг (коромысло), 5 звено – качающийся ползун, 6 звено – стойка (неподвижное).
3. Для данного варианта можно отделить только кинематическую цепь, состоящую из звеньев 2, 3, 4 и 5. Эта цепь представляет собой группу Ассура третьего класса, так как в ней три внутренних кинематических пары (вращательные пары D, C и поступательная E) и три внешних (вращательные пары B, G и F). Для данной структурной группы 2-3-4-5 имеем:
 .
.
Структурная формула структурной группы 2-3-4-5
 .
.
4. Для механизма I класса имеем:
.
Структурная формула механизма I класса
 .
.
5. Формула строения всего механизма (1.9)
Þ .
6. Вывод. Данный механизм III класса.
2 вариант. Ведущее звено четвертое (DG). По этому варианту (рисунок 1.18, б) от механизма последовательно отделяются группы Ассура второго класса, состоящие из звеньев 1-2, 3-5. Степень подвижности не меняется - W=1, поэтому ведущее звено одно (показано стрелкой). Тогда 4 звено DG– кривошип (ведущее), 2 звено ВС – шатун, 3 звено DСF - шатун, 1 звено АВ – рычаг (коромысло), 5 звено – качающийся ползун, 6 звено – стойка (неподвижное).
4. Для структурной группы 1-2 имеем:
 .
.
Структурная формула структурной группы
 1 вид
1 вид
5. Для структурной группы 3-5 имеем:
 .
.
Структурная формула структурной группы
 3 вид.
3 вид.
6. Для механизма I класса имеем:
 .
.
Структурная формула механизма I класса
 .
.
7. Формула строения всего механизма (1.9)
Þ Þ
8. Вывод. Данный механизм II класса.
Пример 4.Выполнить структурный анализ приемника давления электрического дистанционного манометра (рисунок 1.12, а).
4. Подсчитывается степень подвижности механизма по формуле Чебышева (1.2). Имеем n=4, p5=5, p4=1. Далее получаем
 .
.
Строится заменяющий механизм (рисунок 1.12, б) (кинематическая пара IV класса В заменяется одним звеном, входящим в две кинематические пары V класса). Для этого механизма имеем, n=5, p5=7 и получаем
 .
.
5. Ведущее звено задано в условии примера и должно быть одно, так как W=1. Тогда 1 звено – ползун-кулиса (ведущее), 2 звено О2СD– коромысло, 3 звено DЕ - шатун, 4 звено – ползун, 6 звено – кулисный камень, 5 звено – стойка (неподвижное).
6. Механизм расчленяется на группы Ассура (рисунок 1.12, б). Вначале отделяется группа Ассура второго класса, образованная звеньями 3 и 4 (DEF), затем группа второго класса, состоящая из звеньев 2 и 6 (CO2B). На этом разложение заканчивается, так как остались ведущее звено 1 и стойка 5.
7. Для структурной группы 3-4 имеем:
 .
.
Структурная формула структурной группы 3-4
 2 вид
2 вид
6. Для структурной группы 2-6 имеем:
 .
.
Структурная формула структурной группы
 2 вид.
2 вид.
7. Для механизма I класса имеем:
.
Структурная формула механизма I класса
 .
.
8. Формула строения всего механизма (1.9)
Þ Þ .
8. Вывод. Данный механизм II класса.
Пример 5. На рисунке 1.13, а показана схема механизма газораспределения двигателя внутреннего сгорания с ведущим звеном (кулачок).
1. Подсчитывается степень подвижности W механизма по формуле Чебышева. Так как n=3, p5=3,p4=2, то
 .
.
Круглый ролик 2, свободно вращающийся вокруг своей оси, вносит лишнюю степень свободы, поэтому при подсчете числа звеньев он не учитывается. Также в числе p5 кинематических пар V класса не должна учитываться пара С, в которую входит ролик.
Строим заменяющий механизм (рисунок 1.13, б). Каждую кинематическую пару IV класса (точки В и Е) заменяем одним звеном, входящим в две кинематические пары V класса. У заменяющего механизма степень подвижности W будет
 ,
,
ибо у него n=5, p5=7.
2. Так как W=1, то для сообщения звеньям механизма определенного движения достаточно иметь одно ведущее звено, что и указано в условии задачи. Тогда 1 звено АО1 – кривошип (ведущее), 3 звено О2DО3 - коромысло, 4 звено – ползун, 6 звено – О1О2 - шатун, 7 звено О3О4 - шатун, 5 звено – стойка (неподвижное).
3. Расчленение на группы Ассура (рисунок 1.13, б). Вначале отделяется группа второго класса, образованная звеньями 4 и 7, затем группа второго класса, состоящая из звеньев 3 и 6; на этом разложение заканчивается, так как остались ведущее звено 1 и стойка 5.
4. Для структурной группы 7-4 имеем:
 .
.
Структурная формула структурной группы 7-4
 2 вид.
2 вид.
5. Для структурной группы 3-6 имеем:
 .
.
Структурная формула структурной группы
 1 вид.
1 вид.
6. Для механизма I класса имеем:
.
Структурная формула механизма I класса
 .
.
7. Формула строения всего механизма (1.7)
Þ  Þ .
Þ .
8. Вывод. Данный механизм II класса.
Дата добавления: 2015-06-01; просмотров: 3373;