ЗАДАЧИ 21-28
Построение шатунных кривых. Для их построения следует брать 6 равноотстоящих положений ведущего звена механизма.
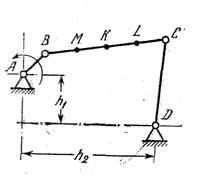
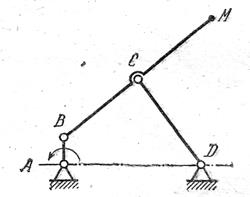
Задача 21. Вычертить шатунные кривые, описываемые точками М, К, L коромыслового механизма. Исходные данные: АВ=50 мм, ВС=200 мм, CD=140 мм, h1=80 мм, h2=220 мм, ВМ=МК=КL=0,25ВС.
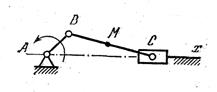
Задача 22. Вычертить шатунную кривую, описываемую точкой М кривошипно-ползунного механизма. Исходные данные: АВ=50 мм, ВС=150 мм, ВМ=75 мм.
Задача 23. Вычертить шатунную кривую, описываемую точкой М механизма Витворта. Исходные данные: АВ=60 мм, АС=80 мм, ВМ=40 мм.
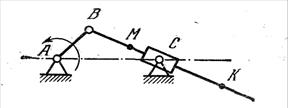
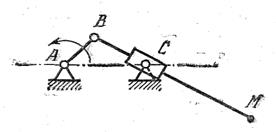
Задача 24. Вычертить шатунные кривые, описываемые точками М и К кривошипного механизма с качающимся ползуном. Исходные данные: АВ=50 мм, АС=140 мм, ВМ=60 мм, ВК=200 мм.

|
|
|
|
|
|
|
Задача 25. Вычертить шатунную кривую, описываемую точкой М кривошипно-ползунного механизма. Исходные данные: АВ=10 мм, ВС=30 мм, ВМ=96 мм.
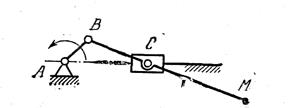
Задача 26. Вычертить шатунную кривую, описываемую точкой М кривошипного механизма с качающимся ползуном. Исходные данные: АВ=20 мм, АС=30 мм, ВМ=119 мм.
Задача 27. Вычертить шатунную кривую, описываемую точкой М механизма противовращательной рукоятки Чебышева. Исходные данные: АВ=6,8 мм, ВС=СD=СМ=50 мм, AD=70,45 мм.
Задача 28. По условию Задачи 21 определить угол β размаха коромысла СD.
§3. Планы скоростей и ускорений механизма строятся после решения задачи о его положении, причем построение планов проводится для отдельных групп Ассура, которые образовали механизм. Вначале строится план скоростей (ускорений) группы, которая присоединена элементами своих внешних кинематических пар к ведущему звену и стойке, затем строятся планы скоростей (ускорений) второй и т.д. групп, взятых в той же последовательности, в какой они присоединяются при образовании механизма. Эта последовательность обозначена в формуле строения механизма (см. п. 1.4, формула (1.9)).
Рассмотрим кинематику ведущего звена. Ведущее звено изображено в масштабе  (рисунок 2.3, а). Скорость точки А будет вычисляться по формуле
(рисунок 2.3, а). Скорость точки А будет вычисляться по формуле
υА = ω1 ℓОА = (м/с).
Вектор скорости  ^ОА и направлен в сторону ω1 (рисунок 2.3,б).
^ОА и направлен в сторону ω1 (рисунок 2.3,б).
а – схема ведущего звена; б – план скоростей; в - план ускорений
Рисунок 2.3. - Кинематический анализ ведущего звена
Угловая скорость ведущего звена – величина постоянная (ω1=const). Поэтому, полное ускорение  (ε1=0,
(ε1=0,  ). Тогда
). Тогда
 .
.
Вектор  ||ОА и направлен к центру вращения (рисунок 2.3, в).
||ОА и направлен к центру вращения (рисунок 2.3, в).
Примечание. Р – полюс (начало построения) плана скоростей; π – полюс плана ускорений.
На плане скоростей скорость точки А изображается отрезком (Ра) (рисунок 2.3, б), а нормальное ускорение этой точки - отрезком (πа) (рисунок 2.3, в). Масштабами планов скоростей и ускорений соответственно будут
 , (2.2, а)
, (2.2, а)
 , (2.2, б)
, (2.2, б)
а масштабами планов аналогов скоростей и ускорений будут
 , (2.3, а)
, (2.3, а)
 . (2.3, б)
. (2.3, б)
В некоторых случаях полезно строить повернутые планы скоростей, т.е. такие, у которых все векторы скоростей повернуты в одну и ту же сторону на 90° относительно их действительных направлений. Эти планы отличаются от обычных (не повернутых) большей точностью построения и, кроме того, удобны в качестве рычага Жуковского для определения уравновешивающей или приведенной силы.
Последовательность решения задачи на построение планов скоростей и ускорений (предполагается, что задача о положении решена и, следовательно, предварительно выяснено строение механизма и назначено ведущее звено):
1) Выполняется структурный анализ и записывается формула строения механизма.
2) Определяют скорость и ускорение ведущего звена. Высчитывают масштабы скорости и ускорения.
3) Строят план скоростей группы Ассура, непосредственно присоединенной к ведущему звену и стойке.
4) Строят план ускорений той же группы.
5) Переходят к построению планов скоростей и ускорений следующей присоединенной группы Ассура и так продолжают до тех пор, пока не будут построены планы скоростей и ускорений всех групп механизма.
Задачу кинематического анализа следует считать решенной, если для каждого звена механизма будут известны положения, скорости и ускорения двух его точек или станут известными положение, скорость и ускорение одной точки и угловая координата, угловая скорость и угловое ускорение самого звена.
Решим несколько примеров на построение планов скоростей и ускорений.
Пример 2.Дан механизм соломонабивателя (рисунок 2.4, а).
Известно: угловая скорость входного звена w1 = 6 (рад/с); длины звеньев ℓО1А = 0,25 (м), ℓАВ =1,2 (м), ℓВО3 = 0,6 (м), ℓАС = 0,2ℓАВ; расстояния между опорами ℓХ =ℓО1О3 =1,4 (м), ℓУ =0,20 (м) 1,2; расстояния до центров масс АS2 = 0,4 AB, O3S3 = 0,6 O3B.
Определить: скорость и ускорение точки С, а также угловую скорость w2 и угловое ускорение ξ2 звена 2.
Решение. Строение механизма. Число подвижных звеньев n=3, число кинематических пар V класса р5=4, степень подвижности W=1. Данный механизм состоит из одной группы Ассура II класса 1-го вида (звенья 2, 3) и ведущего звена 01Асо стойкой 4. Формула строения  .
.
Построение схемы механизма. Рассчитываем масштабный коэффициент длины по формуле (2.1)
 ,
,
где ОА=12,5 мм (выбирается произвольно). Тогда
 ,
,  ,
,
 ,
,  ,
,  .
.
Из произвольно выбранной на поле чертежа точки О1 проводим окружность радиусом R=OA=12,5 мм (траектория движения точки А). Откладываем расстояния Х=70 мм и У=10 мм и отмечаем стойку О3. Согласно заданию откладываем угол φ=30о и отмечаем точку А. Далее, из точки А проводим окружность радиусом R=АВ (60 мм), а из точки О3 проводим окружность радиусом R=ВО3 (30 мм). Пересечение этих дуг есть искомая точка В (рисунок 2.4,а). Для нахождения точки С откладываем угол 130о и отмеряем отрезок АС=10 мм.
Построение плана скоростей. Рассмотрим ведущее звено. Точка А вращается против часовой стрелке относительно точки О1. Поэтому вектор скорости точки A  и направлен в сторону вращения w1. Величина скорости uа определиться по формуле
и направлен в сторону вращения w1. Величина скорости uа определиться по формуле
 .
.
Масштаб плана скоростей равен:
 . (2.4)
. (2.4)
Начинаем построение плана скоростей. Выбираем в качестве полюса плана скоростей точку Р(рисунок 2.4, б) и откладываем от нее отрезок [Ра]= 45 мм перпендикулярно кривошипу О1Ав сторонуw1.
 Рассмотрим структурную группу II класса 1 вида (звенья 2-3). Движение точки Вразложим на переносное поступательное со скоростями точек Аи Оз и относительное вращательное соответственно вокруг точек Аи О3.Тогда векторные уравнения для скорости точки Вбудут иметь вид:
Рассмотрим структурную группу II класса 1 вида (звенья 2-3). Движение точки Вразложим на переносное поступательное со скоростями точек Аи Оз и относительное вращательное соответственно вокруг точек Аи О3.Тогда векторные уравнения для скорости точки Вбудут иметь вид:
(2.5)
В уравнении (2.5) все скорости известны по направлению:  ^ВА,
^ВА,  ^В03.
^В03.
Величины скоростей uВА и uВО3найдем построением плана скоростей.
Продолжаем построение плана скоростей. Через точку авектора  проводим прямую, перпендикулярную звену ВАпроизвольной длины, а из полюса Рпроводим перпендикуляр к оси звена О3Втакже произвольной длины. На пересечении получаем искомую точку в.
проводим прямую, перпендикулярную звену ВАпроизвольной длины, а из полюса Рпроводим перпендикуляр к оси звена О3Втакже произвольной длины. На пересечении получаем искомую точку в.
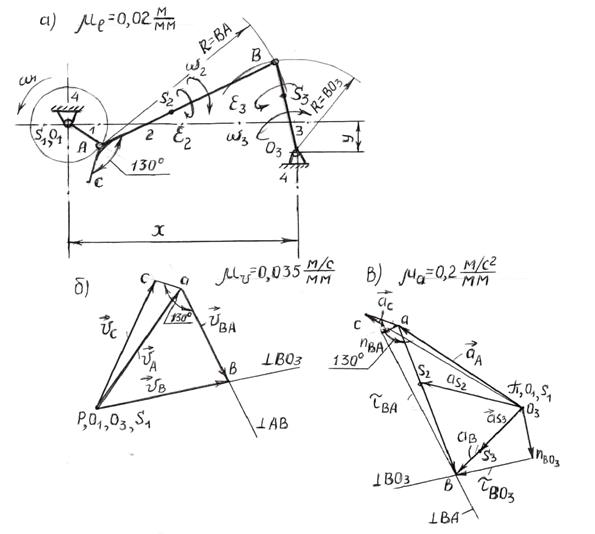
Рисунок 2.4. - Схема шарнирного четырехзвенного механизма
соломонабивателя, его планы скоростейи ускорений
Скорость точки «С»определяем по правилу подобия:
1. если на схеме механизма имеется жесткий треугольник (ΔАВС), то на плане скоростей (ускорений) будет подобный треугольник (Δавс), причем порядок букв на схеме механизма будет совпадать с порядком букв на плане скоростей или ускорений (обход контура);
2. если точка находится на звене и делит его на пропорциональные отрезки, то данная точка на плане скоростей(ускорений) будет находиться на соответствующем векторе и делить его на равнозначные пропорциональные отрезки;
3. если точка находится на продолжении звена, то на плане скоростей (ускорений) она будет находиться на продолжении соответствующего вектора, причем порядок букв на схеме механизма будет совпадать с порядком букв на плане скоростей или ускорений.
Воспользуемся п.1 из правила подобия. Для этого на стороне bа строим треугольник Δвac подобный треугольнику ΔBAC. Соединяем точку «с» с полюсом Р.(Можно точку «с» определить следующим образом. От вектора  отложить по часовой стрелке угол 130о и на нем отложить отрезок
отложить по часовой стрелке угол 130о и на нем отложить отрезок  , длина которого определиться из пропорции
, длина которого определиться из пропорции  ).
).
После построения плана рассчитываем действительные значения скоростей:
 ,
,
 ,
,
 .
.
Угловые скорости 2-го и 3-го звеньев определим по формулам:

 (2.6)
(2.6)
Для определения направлений угловых скоростей необходимо вектора линейных скоростей  , перенести (мысленно) в точку Вна схеме механизма и наблюдать направление поворота точки В относительно точек А и О3. При этом получились направления: w2 и w3 по часовой стрелке.
, перенести (мысленно) в точку Вна схеме механизма и наблюдать направление поворота точки В относительно точек А и О3. При этом получились направления: w2 и w3 по часовой стрелке.
Построение плана ускорений. Рассмотрим ведущее звено. Полное ускорение точки Аявляется нормальным (аА = аnАО), так как w1 = const = 6 (рад/с). Поэтому
 .
.
Вычисляем масштаб плана ускорений
Начинаем построение плана ускорений. Из точки π,принимаемой за полюс (рисунок 2.4, в), проводим отрезок [πа] = 45 мм параллельно звену О1А к центру вращения (к точке О1).
Рассмотрим структурную группу II класса 1 вида (звенья 2-3). При определении ускорения внутреннего шарнира (точки В) следует помнить, что в группах Ассура II класса 1-го вида всегда известны ускорения внешних пар. В нашем случае
aО3=0, аА = 9 (м/с2).
Для определения ускорения аВточки В, как и для определения скорости υВ точки В, рассматриваем ее движение, как сложное, состоящее из переносного поступательного с ускорениями аАи аО3 и относительного вращательного вокруг точек Аи О3. Тогда векторные уравнения для определения ускорения точки Вбудут следующими:
 ,
,
(2.7)
где аОз = 0.
В этих уравнениях известны направления всех векторов:
 || АО1;
|| АО1;  || ВА;
|| ВА;  ^ВА,
^ВА,  || ВО3;
|| ВО3;  ^ BO3.
^ BO3.
Величины нормальных ускорений всегда можно найти, если построен план скоростей:
Тангенциальные ускорения в выражении (2.7) найдем построением плана ускорений.
Вычисляем длины векторов  и
и  , изображающие на плане ускорений ускорения
, изображающие на плане ускорений ускорения  и
и
 .
.
Продолжаем построение плана ускорений. Через точку авектора  проводим вектор
проводим вектор  = 6,6 (мм) параллельно звену АВв направлении от точки В к точке А. Из конца вектора проводим прямую, перпендикулярную звену АВпроизвольной длины. Из полюса πпроводим вектор
= 6,6 (мм) параллельно звену АВв направлении от точки В к точке А. Из конца вектора проводим прямую, перпендикулярную звену АВпроизвольной длины. Из полюса πпроводим вектор  = 16 (мм) параллельно звену ВО3в направлении от точки В к точке О3. Через конец вектора - перпендикуляр к оси звена ВО3 произвольной длиной. Точка «в»пересечения двух прямых определит длины векторов
= 16 (мм) параллельно звену ВО3в направлении от точки В к точке О3. Через конец вектора - перпендикуляр к оси звена ВО3 произвольной длиной. Точка «в»пересечения двух прямых определит длины векторов  и
и  . Модули ускорений
. Модули ускорений  и
и  , равны:
, равны:
 ,
,
 .
.
Угловые ускорения ε2 и ε3 определяем через тангенциальные:
 ,
,  .
.
Ускорения центров масс звеньев 2 и 3 определяем по правилу подобия. Согласно заданию имеем:
[aS2] = 0,4 [aв] = (мм), [πS3] = 0,6 [πв] = (мм).
Соединив полученные точки с полюсом π, получим вектора ускорений центров масс. Значения этих ускорений равны:
аS2 = [πS2] ∙ µа = 38 · 0,2 = 7,6 (м/с2),
aS3 = [πS3] ∙ µа = 18 · 0,2 = 3,6(м/с2).
Ускорение точки Сопределяем также по правилу подобия, п.1. Для этого на стороне bастроим треугольник Δвacподобный треугольнику ΔBAC. Соединяем точку «с» с полюсом π. Действительное значение ускорения определиться
аC = µа· [πC] = 53 ·0,2 = 10,6 (м/с2).
Пример 3. Определить скорость и ускорение поршня В, угловые скорость и ускорение 2-го звена, скорость и ускорение точки S2 (рисунок 2.5). Задачу решить методом планов.
Исходные данные. Длины звеньев: кривошипа ℓОА=0,3 м, шатуна ℓАВ=0,8 м. Угловая скорость кривошипа ω1=30 с-1. Расстояние до центра масс АS2=0,5АВ. Угол φ=600.
Определить.υВ, аВ, ω2, ε2, υS2, аS2.
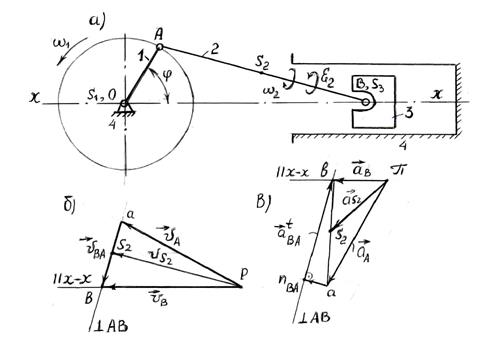
а – схема механизма; б – план скоростей; в – план ускорений
Рисунок 2.5. - Кинематический анализ кривошипно-ползунного
механизма (ДВС)
Решение. Строение механизма. Число подвижных звеньев n=3, число кинематических пар V класса р5=4, степень подвижности W=1. Механизм образован присоединением к ведущему звену ОА и стойке 4 структурной группы II класса 2 вида, состоящей из звеньев 2 и 3. Формула строения  .
.
Построение схемы механизма. Рассчитываем масштабный коэффициент длины по формуле (2.1)
 ,
,
где ОА=30 мм (выбирается произвольно). Тогда
 .
.
Из произвольно выбранной на поле чертежа точки О проводим окружность радиусом R=OA=30 мм (траектория движения точки А). Согласно заданию откладываем угол φ=60о и отмечаем точку А. Далее, из точки А проводим окружность радиусом R=АВ (80 мм) до пересечения с линией х-х. Отмечаем точку В (рисунок 2.5,а).
Построение плана скоростей. Рассмотрим ведущее звено. Точка А вращается против часовой стрелке относительно точки О(рисунок 2.5, а). Поэтому вектор скорости точки А ^ОА и направлен в сторону вращения w1. Величина скорости uВ определиться по формуле
 .
.
Масштаб плана скоростей равен:
 .
.
Начинаем построение плана скоростей. Выбираем в качестве полюса плана скоростей точку Р(рисунок 2.5, б) и откладываем от нее отрезок [Ра]= 50 мм перпендикулярно кривошипу ОАв сторонуw1.
Рассмотрим структурную группу II класса 2 вида (звенья 2-3). Скорость точки В определим из построения векторных уравнений

Где  - скорость точки В при вращении звена АВ вокруг шарнира А, вектор которой
- скорость точки В при вращении звена АВ вокруг шарнира А, вектор которой  ;
;  - относительная скорость точки В в ее движении относительно точки В4, вектор которой
- относительная скорость точки В в ее движении относительно точки В4, вектор которой  ||ОС.
||ОС.
Продолжаем построение плана скоростей. Через точку авектора проводим прямую, перпендикулярную звену АВпроизвольной длины, а из полюса Рпроводим линию, параллельную оси х-х также произвольной длины. На пересечении получаем искомую точку «в».
После построения плана рассчитываем действительные значения скоростей:
υВ = µυ·[Рв] = 0,18·52 = 9,36 (м/с),
υВА = µυ·[ва] = 0,18·30 = 5,4 (м/с).
Скорость точки S2 определяем по Правилу подобия, п.2. Для этого делим отрезок [aв] пополам, т.к. согласно заданию [as2]=0,5[ав]. Полученную точку S2 соединяем с полюсом Р. Находим скорость точки S2
 .
.
Угловые скорости 2-го звена определим по формуле:
Для определения направления угловой скорости ω2 необходимо вектор линейных скоростей перенести (мысленно) в точку «В»на схеме механизма и наблюдать направление поворота точки В относительно точки А. При этом получилось направление w2 по часовой стрелке.
Построение плана ускорений. Рассмотрим ведущее звено. Полное ускорение точки Аявляется нормальным (аА = аnОА), так как w1 = const = 30 (рад/с). Поэтому

Вычисляем масштаб плана ускорений
Начинаем построение плана ускорений. Из точки π,принимаемой за полюс (рисунок 2.5, в), проводим отрезок [πа] = 45 мм параллельно звену ОА к центру вращения (к точке О).
При определении ускорений следует помнить, что в группах Ассура II класса 2-го вида всегда известны ускорения внешних пар. В нашем случае
aВ4=0, аА = 270 (м/с2).
Рассмотрим структурную группу II класса 2 вида (звенья 2-3)  . Для определения ускорения аВточки В, запишем векторные уравнения
. Для определения ускорения аВточки В, запишем векторные уравнения
 ,
,
где аВ4 = 0,  - кориолисово ускорение;
- кориолисово ускорение;  - релятивное (относительное) ускорение. Эти два вида ускорения возникают при поступательном движении.
- релятивное (относительное) ускорение. Эти два вида ускорения возникают при поступательном движении.
В этих уравнениях известны направления всех векторов:
|| АО; || ВА; ^ВА,  || ОС.
|| ОС.
Величины нормального и кориолисово ускорений можно найти по формулам
Угловая скорость ω3=0, т.к. движение звена 3 поступательное.
Тангенциальное и релятивное ускорения найдем построением плана ускорений.
Вычисляем длину вектора , изображающее на плане ускорений ускорение
 .
.
Продолжаем построение плана ускорений. Через точку авектора проводим вектор = 6,75 (мм) параллельно звену АВв направлении от точки В к точке А. Из конца вектора проводим прямую, перпендикулярную звену АВпроизвольной длины. Из полюса πпроводим линию, параллельную оси х-х. Точка впересечения двух прямых определит длины векторов и  . Модули ускорений и
. Модули ускорений и  , равны:
, равны:
 ,
,
 .
.
Угловое ускорение ε2 определяем через тангенциальное:
 .
.
Для определения направления ε2 необходимо вектор тангенциального ускорения  приложить (мысленно) в точку В и посмотреть вращение относительно точки А. Направление ε2 получилось против часовой стрелки.
приложить (мысленно) в точку В и посмотреть вращение относительно точки А. Направление ε2 получилось против часовой стрелки.
Ускорение центра масс звена 2 определяем по правилу подобия, п.2. Согласно заданию имеем:
[aS2] = 0,5 [aв] = 0,5 ∙ 40 = 20 (мм).
Соединив полученную точку S2 с полюсом π, получим вектор ускорения центра масс. Значение этого ускорения равны:
аS2 = [πS2] ∙ µа = 30 · 5,4 = 16,2 (м/с2).
Пример 4. Дан кулисный механизм с качающейся кулисой (рисунок 2.6, а). Методом планов определить скорости и ускорения точек А3, В, а также угловые скорость и ускорений звена 3.
Исходные данные: угловая скорость w1 = 3 (рад/с), длины звеньев ℓO1A = 0,2 (м), ℓBO3, = 0,75 (м), ℓO1О3 = 0,4 (м). Угол φ=1200.
Определить.υВ, аВ, ω3, υА3, аА3, ε3.
Решение. Строение механизма. Число подвижных звеньев n=3, число кинематических пар V класса р5=4, степень подвижности W=1. Механизм образован присоединением к ведущему звену О1А и стойке 4 структурной группы II класса 3 вида, состоящей из звеньев 2 и 3. Формула строения 
Построение схемы механизма. Рассчитываем масштабный коэффициент длины по формуле (2.1)
 ,
,
где О1А=20 мм (выбирается произвольно). Тогда
 .
.
Из произвольно выбранной на поле чертежа точки О1 проводим окружность радиусом R=O1A=20 мм (траектория движения точки А). Согласно заданию откладываем угол φ=120о и отмечаем точку А. Далее, от точки O1 откладываем вниз расстояние O1O3= 40 мм. Соединяем точку O3 с точкой А и продолжаем дальше (длина O3В = 75 мм). Отмечаем точку В (рисунок 2.6, а).
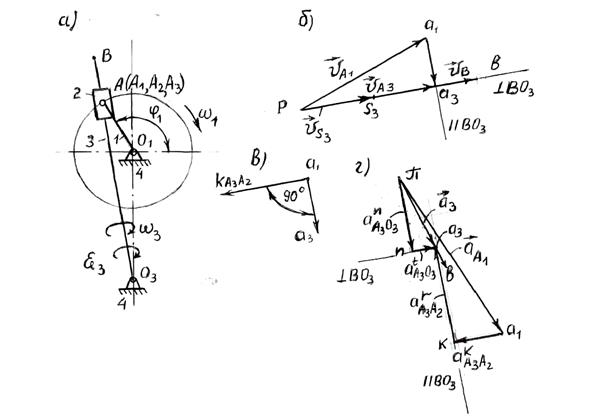
Рисунок 2.6. - Схема кулисного механизма,
его планы скоростей и ускорений
Построение плана скоростей. Рассмотрим ведущее звено. Обозначим точку А1 на схеме механизма, принадлежащую звену 1, точку А2, принадлежащую звену 2 и А3 - звену 3. Скорости точек А1и А2известны и по модулю
 .
.
Масштаб плана скоростей определим по формуле
 .
.
Начинаем построение плана скоростей. Из полюса Р(рисунок 2.6, б) проводим вектор  длиной 45мм перпендикулярно звену 01Ав сторону w1.
длиной 45мм перпендикулярно звену 01Ав сторону w1.
Рассмотрим группу Ассура II класса 3 вида (звенья 2-3). Согласно теореме о плоском движении записываем векторные уравнения:

(2.8)
В этом уравнении известны все направления векторов
 ^ O1A,
^ O1A,  || ВО3,
|| ВО3,  ^ BO3.
^ BO3.
Продолжаем построение плана скоростей. Из точки а1проводим прямую, параллельную звену ВО3, а из полюса Р- прямую, перпендикулярную звену ВО3. Точка пересечения этих прямых - есть искомая точка а3.
Положение точки в на плане скоростей находим из условия пропорциональности отрезков (Правило подобия, п.3):
 .
.
Значения длин отрезков подставляем в уравнения в мм, замерив их с плана скоростей и плана механизма.
Действительные значения скоростей вычислим через масштабный коэффициент
υВ = µυ· [Рв] = 0,013 ·56,3 = 0,732 (м/с);
υА3А2 = µυ· [а3а2]= 0,013 ·15 = 0,195(м/с).
Угловую скорость и длину звена рассчитаем по формулам
 (2.9)
(2.9)
Для определения направления ω3 необходимо вектор скорости  приложить (мысленно) в точку А3 и посмотреть вращение относительно точки О3. Получилось следующее направление: ω3 – по часовой стрелке (рисунок 2.6,а).
приложить (мысленно) в точку А3 и посмотреть вращение относительно точки О3. Получилось следующее направление: ω3 – по часовой стрелке (рисунок 2.6,а).
Построение плана ускорений. Рассмотрим ведущее звено. Полное ускорение точки А1является нормальным (аА = аnАО), так как w1 = const = 6 (рад/с). Поэтому по формуле (4.8) имеем
 .
.
Масштабный коэффициент плана ускорений
Начинаем построение плана ускорений.Из полюса π (рисунок 2.6, г) проводим вектор  = 60 (мм) параллельно звену О1Аот точки Ак точке O1.
= 60 (мм) параллельно звену О1Аот точки Ак точке O1.
Рассмотрим группу Ассура II класса 3-го вида (звенья 2-3). Особенность такой группы Ассура заключается в том, что переносным движением является вращательное движение кулисы 3 вокруг точки О3, а поступательным является движение камня 2 по кулисе 3. Из этого следует, что абсолютное ускорение точки А3 равно сумме трех ускорений: переносного, относительного и кориолисова. Ускорения внешних пар (шарниров) А1и О3 известны по модулю.
aО3 = 0, аА1 = 1,8 (м/с2).
Неизвестно ускорение точки А3 во внутренней поступательной паре. Запишем векторное уравнение для построения плана ускорений

(2.10)

где  - кориолисово ускорение;
- кориолисово ускорение;  - релятивное (относительное) ускорение поступательного движения кулисы 3 относительно камня 2;
- релятивное (относительное) ускорение поступательного движения кулисы 3 относительно камня 2;  - нормальное ускорение точки А3кулисы 3 в ее вращательном движении вокруг точки О3;
- нормальное ускорение точки А3кулисы 3 в ее вращательном движении вокруг точки О3;  - тангенциальное ускорение точки А3кулисы 3 в ее вращательном движении вокруг точки О3.
- тангенциальное ускорение точки А3кулисы 3 в ее вращательном движении вокруг точки О3.
В уравнениях (2.10) направления всех векторов известны
 || АО1;
|| АО1;  || ВО3;
|| ВО3;  ^ВО3;
^ВО3;  || АО3;
|| АО3;  ^ АO3; аОз = 0.
^ АO3; аОз = 0.
Для определения направления кориолисова ускорения  необходимо вектор относительной скорости
необходимо вектор относительной скорости  повернуть вокруг его начала на 90° в направлении угловой скорости кулисы 3w3 (рисунок 2.6, в). Получилось, что вектор
повернуть вокруг его начала на 90° в направлении угловой скорости кулисы 3w3 (рисунок 2.6, в). Получилось, что вектор  будет направлен ^ВО3 влево.
будет направлен ^ВО3 влево.
Найдем величины ускорений и


Вычислим масштабные отрезки ускорений
 . (2.11)
. (2.11)
Продолжаем построение плана ускорений. Из конца вектора проводим вектор =13 (мм). Далее, через конец вектора  проводим прямую, параллельную звену О3В. Построение 1-го уравнения формулы (2.10) закончили. Начинаем построение 2-го уравнения. Из полюса π плана ускорений проводим вектор
проводим прямую, параллельную звену О3В. Построение 1-го уравнения формулы (2.10) закончили. Начинаем построение 2-го уравнения. Из полюса π плана ускорений проводим вектор  параллельно звену ВО3в направлении от точки А3 к точке О3 длиной 20 мм. Через конец вектора
параллельно звену ВО3в направлении от точки А3 к точке О3 длиной 20 мм. Через конец вектора  проводим прямую, перпендикулярную звену ОзВ. Точка а3пересечения прямых определит величины отрезков
проводим прямую, перпендикулярную звену ОзВ. Точка а3пересечения прямых определит величины отрезков  и
и  . Длину вектора
. Длину вектора  на плане ускорений находим из пропорциональности отрезков (Правило подобия, п.3):
на плане ускорений находим из пропорциональности отрезков (Правило подобия, п.3):
 .
.
Определим действительные значения линейных и угловых ускорений


 .
.
Для определения направления ε3 необходимо вектор тангенциального ускорения  приложить (мысленно) в точку А3 и посмотреть вращение относительно точки О3. Получилось следующее направление: ε3 – по часовой стрелке (рисунок 2.6,а).
приложить (мысленно) в точку А3 и посмотреть вращение относительно точки О3. Получилось следующее направление: ε3 – по часовой стрелке (рисунок 2.6,а).
Дата добавления: 2015-06-01; просмотров: 4020;