КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
ФУНКЦИЯ ПОЛОЖЕНИЯ. ПЛАНЫ ПОЛОЖЕНИЙ, СКОРОСТЕЙ И УСКОРЕНИЙ МЕХАНИЗМОВ
§1. Функцией положения ведомого звена (или точки на нем) называется зависимость его (или её) от перемещения ведущего звена.
Вид функции положения зависит от схемы механизма. На рисунке 2.1. изображен кривошипно-ползунный механизм компрессора. Функция положения этого механизма будет иметь вид
 ,
,
т.е. перемещение ведомого звена (поршня S3) зависит от углового перемещения ведущего звена (кривошипа АВ).
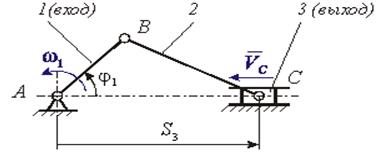
Рисунок 2.1. – К определению функции положения
§2. Задачи о положениях, скоростях и ускорениях решаются применительно к группам Ассура, которыми образован механизм.
Эти задачи решаются в следующей последовательности.
1) Проводится структурный анализ и классификация механизма по Ассуру.
2) Выбирается ведущее звено (при W=1). За ведущее звено обычно выбирают звено, которое совершает вращательное движение и может совершить полный оборот вокруг неподвижной оси. Задается закон движения этого звена (как правило, задается равномерное вращение этого звена).
3) Выбирается масштаб чертежа и на чертеже наносятся неподвижные элементы кинематических пар механизма. По заданной обобщенной координате строится положение ведущего звена.
4) Строятся планы положений каждой группы Ассура в соответствии с последовательностью образования ими механизма.
5) Строятся планы скоростей.
6) Строятся планы ускорений.
Масштабы для планов положений, скоростей и ускорений подбирают так, чтобы планы получились достаточно точными и лучше использовалось поле чертежа.
В курсе теории механизмов и машин принято понимать под масштабом той или иной величины отношение этой величины к отрезку, который ее изображает на чертеже.
Размерности масштабов для кинематических величин таковы: масштаба длин –  , скоростей –
, скоростей –  , ускорений –
, ускорений –  .
.
Покажем решение задачи о положениях на конкретном примере.
Пример 1. Определить ℓSmax ход поршня (ползуна) и построить шатунную кривую механизма ДВС (рисунок 2.2, а).
Рисунок 2.2, а - Механизм двигателя ДВС
Исходные данные. Длины звеньев: кривошипа ℓОА=0,3 м, шатуна ℓАВ=0,7 м. Угловая скорость кривошипа ω1=30 с-1. Расстояние до центра масс АS2=0,5АВ.
Указания. Механизм построить в масштабе μℓ в шести положениях, начиная с крайних. За начало отсчета принять положение, при котором поршень В находится в крайнем правом положении.
Решение. 1. Считаем масштабный коэффициент длины
 , (2.1)
, (2.1)
где ОА=30 мм (выбирается произвольно). Тогда
 .
.
2. Начинаем построение с нанесения неподвижных звеньев – точки О и траектории движения поршня В (линия х-х). Затем из точки О радиусом R=ОА=30 мм проводим окружность - траекторию движения точки А.
3. Определяем ход поршня. Отмечаем точку А0 справа от точки О (согласно заданию). От нее вправо откладываем расстояние АВ=70 мм – отмечаем точку В0 (крайнее правое положение поршня). Делим окружность на 6 равных частей в сторону ω1. Отмечаем точки А1, А2…А5. От точки А3 откладываем расстояние АВ=70 мм также вправо. Отмечаем точку В3 – крайнее левое положение поршня. Отрезок [В0В3]=Smax – ход поршня В (рисунок 2.2,б). Действительное значение определится
ℓSmax=[В0В3]·μℓ=60·0,01=0,6 (м).
4. Построение шатунной кривой, описываемой точкой S2. Шатунная кривая – траектория точек звена, не входящего в кинематические пары со стойкой, т.е. шатуна. Для этого рассчитываем расстояние АS2=0,5АВ=0,5·70=35 мм. Отрезком [АS2] от каждой точки А откладываем 35 мм на своем положении шатуна. Полученные точки соединяем плавной линией (показано пунктирной линией).
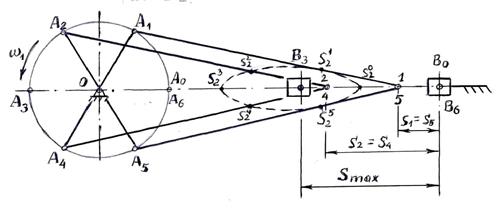
Рисунок 2.2, б - Определение хода поршня и построение
шатунной кривой механизма ДВС
Дата добавления: 2015-06-01; просмотров: 1772;