ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ. Механизм – искусственно созданная система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел.
СТРУКТУРНЫЙ АНАЛИЗ И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Механизм – искусственно созданная система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел.
Твердые тела, из которых образуется механизм, называются звеньями.
Звено -это деталь, либо совокупность деталей, соединенных в одну неизменную систему.
Звенья бывают подвижные и неподвижные. Неподвижное звено механизма называется стойкой или опорой. Неподвижное звено на кинематических схемах показывается штриховкой.
Подвижные звенья различают по характеру их движения. Звено, совершающее полный оборот вокруг неподвижной оси, называют кривошипом, при неполном обороте – коромыслом (рычагом). Звено, участвующее одновременно в двух движениях - в поступательном и во вращательном вокруг некоторой мгновенной оси, называют шатуном. Звено, вращающееся вокруг неподвижной оси и входящее с другим звеном в поступательную кинематическую пару, называют кулисой.
Подвижные звенья также делятся на ведущие (в других источниках - входные или начальные), ведомые (выходные, рабочие) и соединительные (промежуточные). Ведущее (начальное) - звено, закон движения которому задан. За ведущее звено принимается кривошип, реже ползун. Ведущее звено приводится в движение от двигателя. Ведомое (рабочее) - звено, совершающее требуемое движение, для которого предназначен механизм. Соединительные (промежуточные) – звенья, которые соединяют ведущее и рабочее звенья.
Кинематической парой называется подвижное соединение двух соприкасающихся звеньев. Поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называются элементами кинематической пары.
Кинематической цепью называется совокупность звеньев, соединенных между собой кинематическими парами. Кинематические цепи подразделяются на простые и сложные, замкнутые и незамкнутые.
Простой кинематической цепью называется цепь, у которой каждое звено входит не более чем в две кинематические пары.
Сложной кинематической цепью называется цепь, у которой имеются хотя бы одно звено, входящее более чем в две кинематические пары.
Замкнутой кинематической цепью называется цепь, каждое звено которой входит по крайней мере в две кинематические пары.
Незамкнутой кинематической цепью называется цепь, у которой есть звенья, входящие только в одну кинематическую пару.
Подавляющее большинство механизмов, применяющихся в инженерной практике, образованы замкнутыми кинематическими цепями. Поэтому механизм (состоящий только из твердых тел) может быть определен также следующим образом.
Механизмом называется кинематическая цепь, в которой при заданном движении одного или нескольких звеньев (ведущих) относительно любого их них (стойки) все остальные звенья (ведомые) совершают однозначно определяемые движения.
Число степеней свободы механизма относительно стойки называют степенью подвижности и обычно обозначают буквой W. Большинство механизмов, используемых в технике, имеют степень подвижности, равную единице (W=1), но иногда встречаются механизмы с двумя и более степенями подвижности; такие механизмы называются дифференциальными.
В сборнике принята классификация кинематических пар по И.И. Артоболевскому. Все кинематические пары разделяются на пять классов. Номер класса кинематической пары определяется числом условий связи, которые наложены на движение одного звена пары относительно другого. Отсюда следует, что пара I класса (р1) может быть названа пятиподвижной, пара II класса – четырехподвижной (р2) и т.д.
Для решения вопроса, к какому классу относится та или иная кинематическая пара, следует поступать так. Одно из звеньев, входящих в кинематическую пару, представить неподвижным. Связать с ним систему координат Oxyz и, ориентируясь по ней, проследить, какие движения другого звена пары не возможны из шести движений, которые оно имело бы возможность совершать, не входя в пару. Число этих невозможных движений (как равное числу связей в паре) представит собою номер класса пары.
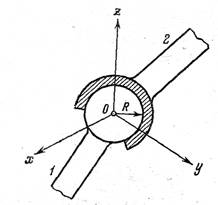
Рисунок 1.1. – Сферическая кинематическая пара
На рисунке 1.1 изображена низшая (сферическая) кинематическая пара. Элементом кинематической пары на первом звене является сферическая поверхность радиуса R, а на звене 2 – сферическая поверхность того же радиуса R, охватывающая сферическую поверхность на звене 1. Проведя через центр О сферы прямоугольную систему координат Oxyz, связанную со звеном 1, замечаем, что звено 2 не может перемещаться поступательно вдоль осей Ox, Oyи Oz, но может свободно вращаться вокруг этих же осей. Следовательно, эту кинематическую пару надо отнести к третьему классу (невозможны три из шести движений).
Рассмотрим еще один пример. Пусть (рисунок 1.1) на движение звеньев, входящих в сферическую пару, наложено условие, что они совершают плоскопараллельное движение относительно плоскости Oyz. В данном случае, помимо ранее наложенных связей, появились еще две общие связи – невозможность вращения вокруг осей Oyи Oz. Эту кинематическую пару надо отнести к пятому классу.
Дата добавления: 2015-06-01; просмотров: 2019;