Общие понятия и особенности нелинейных систем
Строго говоря, линейных систем в природе не существует, так как характеристики реальных устройств нелинейные и некоторые из них не могут быть линеаризованы, например, характеристика логического элемента. Кроме того, есть системы, например, релейные, адаптивные, в которых принципиально необходимо учитывать нелинейности.
Нелинейной системой называется такая система, в состав которой входит хотя бы одно звено, описываемое нелинейным уравнением. Такое звено называется нелинейным звеном или нелинейным элементом.
Уравнение является нелинейным, если некоторые координаты или их производные по времени входят в уравнение в виде произведений или степени, отличной от первой, а также если коэффициенты уравнения являются функциями некоторых координат или их производных.
При составлении дифференциальных уравнений нелинейных систем сначала составляют дифференциальные уравнения для каждого устройства системы. При этом характеристики устройств, допускающих линеаризацию, линеаризуются. В результате получают систему дифференциальных уравнений, в которой одно или несколько уравнений нелинейные. Устройства, допускающие линеаризацию, образуют линейную часть системы, а устройства, которые не могут быть линеаризованы, составляют нелинейную часть.
Путем эквивалентного преобразования структурных схем и нелинейных звеньев большое число нелинейных систем можно представить в виде замкнутого контура с последовательным включением нелинейного элемента (НЭ) и линейной части (ЛЧ), как показано на рис. 2.1.
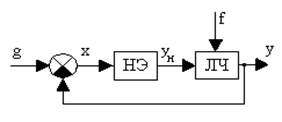
Рис. 2.1. Функциональная схема нелинейной системы:
НЭ - нелинейный элемент; ЛЧ - линейная часть
Классификация нелинейных элементов и систем. Нелинейные звенья классифицируются по различным признакам. Наибольшее распространение получила классификация по статическим и динамическим характеристикам, так как в системах чаще всего нелинейности приходится учитывать в виде характеристик. Эти характеристики могут быть как однозначными, так и двузначными (петлевыми), симметричными и несимметричными относительно начала координат.
Различают следующие основные типы нелинейных звеньев.
Нелинейные звенья с гладкими криволинейными характеристиками. Примеры таких характеристик приведены на рис. 2.2.
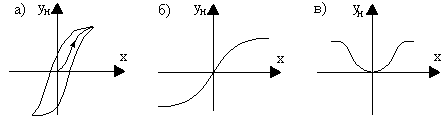
Рис. 2.2. Гладкие криволинейные характеристики:
а - гистерезисная; б, в - усилительные
На рис. 2.2,а изображена двузначная гистерезисная (запаздывающая) характеристика. Характеристика (рис. 2.2,б) отображает насыщение или ограничение и соответствует реальному амплитудному усилителю, а характеристика (рис. 2.2,в) - реальному усилителю мощности. Характеристики (рис. 2.2,а и б) -нечетно-симметричные, а характеристика (рис. 2.2,в) - четно-симметричная.
Нелинейные звенья с кусочно-линейными характеристиками. Некоторые из таких характеристик представлены на рис. 2.3.
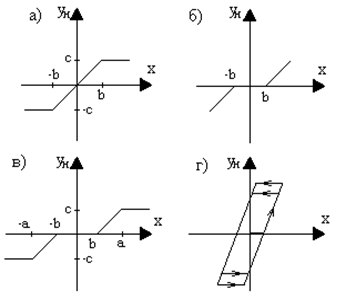
Рис. 2.3. Кусочно-линейные характеристики:
а - с насыщением; б - с зоной нечувствительности;
в - с насыщением и зоной нечувствительности; г - люфт
Характеристика (рис. 2.3,а) отображает насыщение, характеристика (рис. 2.3,б) - зону нечувствительности, а характеристика (рис. 2.3,в) соответствует звену, обладающему одновременно зоной нечувствительности и насыщением. Характеристика (рис. 2.3,г) позволяет учесть люфт или зазор кинематической передачи.
Релейные звенья - это элементы, которые на своем выходе выдают конечное число фиксированных значений. Три наиболее типовые релейные характеристики изображены на рис. 2.4.
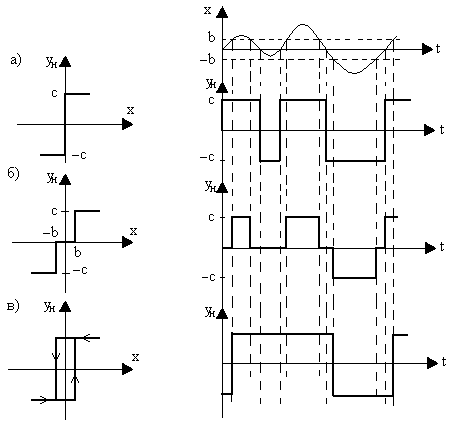
Рис. 2.4. Релейные характеристики:
а - идеальная; б - с зоной нечувствительности; в - гистерезисная
Характеристика (рис. 2.4,а) соответствует идеальному двухпозиционному реле, характеристика (рис. 2.3,б) - трехпозиционному реле с зоной нечувствительности, а характеристика (рис. 2.3,в) - двухпозиционному поляризованному реле.
Кроме того, на рис. 2.4 показано прохождение непрерывного сигнала через соответствующие типы реле. Откуда следует, что коэффициент передачи реле зависит от величины входного воздействия.
Для улучшения динамических свойств систем специально созданы нелинейные звенья с опережающими двузначными статическими характеристиками.
Часто встречаются элементы с несимметричными относительно начала координат статическими характеристиками.
Нелинейные вычислительные звенья, например, множительное, логическое звено и другие.
Различают статические и динамические нелинейности. Первые представляются в виде нелинейных статических характеристик, а вторые - в виде нелинейных дифференциальных уравнений.
Нелинейные системы обычно классифицируются в соответствии с видом входящих в них нелинейных звеньев.
Особенности нелинейных систем. Поведение нелинейных систем, при наличии существенных нелинейностей, значительно отличается от поведения их линейных моделей [10].
1. Выходная величина нелинейной системы непропорциональна входному воздействию; форма реакции системы зависит от величины входного воздействия.
2. Характер процессов в нелинейной системе зависит от величины начального отклонения, вызванного возмущением. В связи с этим для нелинейных систем существуют понятия об устойчивости “в малом”, “в большом”, “в целом”.
Система устойчива “в малом”, если она устойчива при малых (бесконечно малых) начальных отклонениях. Система устойчива “в большом”, если она устойчива при больших (конечных по величине) начальных отклонениях. Система устойчива “в целом”, если она устойчива при любых больших (неограниченных по величине) начальных отклонениях.
3. Для нелинейных систем характерен режим незатухающих периодических колебаний с постоянной амплитудой и частотой (автоколебаний), возникающий в системах при отсутствии периодических внешних воздействий.
4. При затухающих колебаниях переходного процесса в нелинейных системах происходит изменение периода колебаний.
Основные задачи исследования нелинейных систем. Методы исследования. Задачами исследования нелинейных систем являются:
1) отыскание возможных состояний равновесия системы и исследование их устойчивости;
2) определение автоколебаний и анализ их устойчивости;
3) исследование процессов перехода системы к тому или иному установившемуся состоянию при различных начальных отклонениях.
Начало исследования нелинейных систем обычно связано с рассмотрением устойчивости и определением автоколебаний.
В настоящее время не создано общей теории анализа нелинейных систем. Разработанные методы позволяют решать лишь отдельные нелинейные задачи.
Все инженерные методы исследования нелинейных систем разделяются на две основные группы.
Точные методы, например, метод А.М.Ляпунова, метод фазовой плоскости, метод точечных преобразований, частотный метод В.М.Попова, основаны на точном решении нелинейного дифференциального уравнения, может быть и упрощенного.
Приближенные методы, такие как метод гармонической линеаризации, метод статистической линеаризации, основаны на линеаризации нелинейного уравнения системы.
Мощным и эффективным методом исследования нелинейных систем является моделирование, инструментарием которого служит компьютер. В настоящее время многие сложные для аналитического решения теоретические и практические вопросы сравнительно легко могут быть решены с помощью вычислительной техники.
Дата добавления: 2015-06-01; просмотров: 3925;