Законы регулирования
Закон регулирования - это закон изменения управляющего параметра, подаваемого на исполнительный механизм. Закон регулирования определяется характеристиками автоматического регулятора, заложенными в его принцип работы.
Зависимость выходного сигнала Y регулятора от входного X называется статической характеристикой регулятора Y(X).
Промышленностью выпускаются регуляторы с пятью законами регулирования. Рассмотрим основные типы регуляторов.
Регуляторы с позиционным (релейным) законом регулирования. Структурная схема позиционной САР показана на рис. 6.2. Данные типы регуляторов еще называют Т-регуляторами или компараторами Они бывают с двухпозиционным и трехпозиционным законом регулирования.
Двухпозиционные имеют дискретную выходную величину Y типа включен/выключен (например, включение/выключение нагревателя). Т-регулятор включает или выключает выходное реле в зависимости от того, достигла или не достигла регулируемая величина X заданного значения
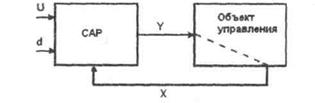
Рисунок 6.2 - Структурная схема позиционной CAP: U, d -вектора заданий и зон нечувствительности; X, Y - вектор регулируемой величины и выходной сигнал регулирования
Зона нечувствительности d определяет разницу в величине срабатывания при возрастании сигнала X и его снижении.
Трехпозиционные регуляторы имеют дискретную выходную величину Y с двумя точками переключения типа включено/выключено.
Для определения возможности применения Т-регулятора необходимо знать инерционность - постоянную времени, и время транспортного запаздывания регулируемого объекта. Двухпози-ционное Т-регулирование на примере САР с водяным отоплением при управлении подачи теплоносителя задвижкой иллюстрируется на рис.6.3.
В здание подается то или иное количество теплоты от котельной. Оно регулируется управляемой задвижкой Z. В зависимости от объема помещения V, солнечного тепла и окружающей среды изменяется теплориток в здание G и температура в здании X. САР должна поддерживать температуру в здании постоянной, заданной в автоматическом регуляторе TR. Пример разгонной характеристики здания приведена на рис.6.4.
Датчик температуры DT подает электрический сигнал в регулятор TR, который сравнивает заданную температуру с действительной в здании. В зависимости от результата сравнения температур подается сигнал на открытие или закрытие заслонки Z.
Если температура в здании меньше заданной, то заслонка открывается и в здание начинает поступать горячая вода. Температура в здании повышается, достигает необходимой величины и автоматический регулятор отключает задвижку. Горячая вода в здание больше не поступает, температура в нем понижается до минимальной величины, включается регулятор, открывается заслонка и т.д.
На вход исполнительного механизма Z подается ступенчатое воздействие Y , в результате чего состояние объекта представляет собой некоторый процесс X(t) - переходную характеристику. Установившееся значение Ху - это максимальное значение температуры в помещении, достигаемая при данной мощности котельной.
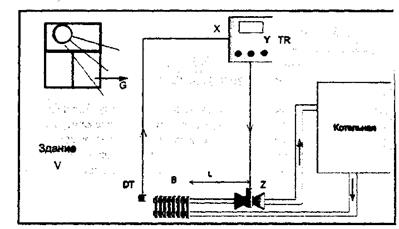
Рисунок 6.3 - Блок-схема САР с водяным отоплением здания:
G - теплоприток от солнца и окружающей среды; V- объем нагреваемого помещения; В-батареи отопления; DT- датчик температуры; L-расстояние от котельной до здания; TR-автоматический регулятор; Z- исполнительный механизм - управляемая задвижка теплоносителя; Х- входной регулируемый параметр- температура в здании; Y- сигнал на исполнительный механизм.
С момента открытия заслонки до момента прихода горячей воды в здание проходит определенное время Ти. Транспортное запаздывание Ти - время после включения заслонки, за которое температура в помещении достигнет принятого значения 0,1ХУ Оно определяется временем притока воды в батарею из отопительной сети и временем распространения теплового потока в воздухе помещения.
Для экспоненты (без запаздывания) постоянная времени Та определяется как время, прошедшее с начала процесса до повышения температуры до величины
Х=0,63ХУ.
Постоянная времени объекта регулирования Та зависит от объема помещения V. Следовательно, уменьшая длину трубопровода L и приближая датчик DT к батарее В, мы можем снизить соотношение Tи/Ta и упростить задачу регулирования.
Для регуляторов с релейным выходом на объект подается 100% мощности - заслонка открывается полностью.
Исходя из соотношения Tи/Ta и выбирается тип регулятора. Т- регулятор можно применять, если Tи/Ta < 0,1. Выходная величина Y равна максимальному воздействию (нагреватель включен, заслонка открыта полностью) при рассогласовании
ε=X-U<-d; Y=0 при ε > d,
где: U- задаваемое регулятору значение температуры, которую необходимо поддерживать в помещении, d - порог срабатывания регулятора - минимальное значение колебания температуры, которое он может отслеживать с определенной ошибкой регулирования.
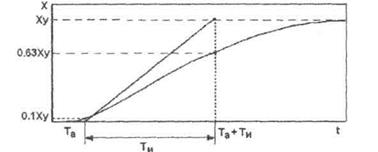
Рисунок 6.4 - Переходные процессы для объектов с различными свойствами: Х- входной регулируемый параметр- температура в здании; τ- время процесса; Ти - время транспортного запаздывания; Та- постоянная времени (время согласования); Ху - установившееся значение температуры в помещении.
Алгоритм регулирования для позиционных регуляторов определяется статической характеристикой регулятора - зависимостью выходного сигнала Yот входного X (рис.6.5).
Процесс регулирования представляет собой колебание вокруг задания U (рис.6.6). Частота и амплитуда определяются величинами Тa, R, Tu, d.
Пусть заданное значение температуры, которое необходимо поддерживать в помещении U3=18° С, а порог срабатывания ± 2 С Тогда процесс регулирования температуры Т - регулятором будет происходить следующим образом.
Пусть первоначально температура в помещении U <= 16° С, т.е. меньше, чем заданная
Uз =18°C. Регулятор TR включен, открыта задвижка Z, в результате чего горячая вода подается в помещение. Через время t0 температура начинает повышаться и достигает заданного значения
U =18°C . Однако, в силу ее неравномерности по объему помещения, инерционности датчика температуры DT и наличия порога срабатывания, регулятор сработает несколько позднее того времени, когда температура достигнет заданного значения. За это время за счет пришедшего "лишнего тепла" температура в помещении поднимется выше заданной, например до 20° С. Этот эффект называется перерегулированием. Регулятор отключается и перекрывает задвижку с теплоносителем. Подача тепла в помещение прекращается.
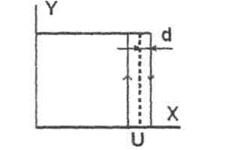
Рисунок 6.5 - Статическая характеристика двухпозиционного регулятора.
Помещение начинает остывать. Температура после отключения регулятора (закрытия задвижки) начинает падать. Ее падение продолжается до заданного значения 18 ° С, и ниже в силу все той же инерционности системы и наличия порога срабатывания. Сработает регулятор только при температуре, например, 16 ° С, после чего откроется задвижка и горячая вода вновь начнет поступать в помещение и поднимать температуру

Рисунок 6.6 - Процесс регулирования температуры Т-регулятором
Таким образом, температура в помещении будет колебаться вокруг заданной, но не будет равна ей, т.е. Т - регулятор имеет статическую ошибку.
Для объектов с большой инерционностью Та и с малым запаздыванием Ти регулирование происходит с постоянными колебаниями, доходящими до 5-15% от U. Чем больше d, Tа/Tи, R, тем больше амплитуда колебаний. Чем больше Та и Ти, тем больше период колебаний.
Подобные регуляторы используются для регулирования температуры воды в баках, в пастеризаторах, для управления нагревом печей хлебозавода, в сушильных камерах, в саунах и других объектах. Позиционные регуляторы практически неприменимы для систем с существенным транспортным запаздыванием Tа > 0,2tn и для объектов без самовыравнивания, так как регулируемая величина выходит далеко за необходимые пределы регулирования.
Пропорциональные регуляторы. В пропорциональном регуляторе входная (рассогласование) ε=U-X и выходная величины связаны соотношением Y=Kε, где К- постоянный коэффициент.
Рассмотрим принцип действия пропорционального регулятора для разгонной кривой объекта регулирования 1 (рис.6.7), аналогичной разгонной кривой отопления здания (рис.6.4). Выходная величина регулятора Y, пропорциональная сигналу рассогласования, определяет уровень открытия задвижки - чем больше рассогласование, тем больше открыта заслонка.
При данном законе регулирования значение регулируемой величины X никогда не достигнет задания U. Всегда имеется статическая ошибка d = U-X.
При постоянном коэффициенте К приближение температуры X к заданию U постепенно уменьшает подаваемую тепловую мощность Y=K(U-X)- заслонка закрывается. Но теплота рассеиваемая в окружающую среду, при этом увеличивается, и при Y = Kd наступит равновесие теплопритоков и ошибка d не достигнет 0, т.к. если d будет равно 0, то и выходной сигнал (подаваемая котельной тепловая мощность) будет равен нулю, У = 0. В результате, чем больше приближается регулируемая величина X к заданию U, тем меньше сигнал Y с САР, и тем меньше под действием окружающей среды стремится регулируемая величинах к заданию U.
Таким образом, на выходе регулятора устанавливается некоторое значение Y=Kd,
которое приводит регулируемую величину X в состояние, отличное от задания U. Чем больше коэффициент К, тем меньше ошибка.
При больших значениях К резко увеличивается величина X и при значительной величине транспортного запаздывания система переходит в режим автоколебаний (рис.6,6., зависимость 2). При меньшем значении К регулирование происходит без колебаний (рис.6.6., зависимость 3). При пропорциональном регулировании регулятор реагирует на мгновенное изменение рассогласования. При очень большом коэффициенте усиления К пропорциональный регулятор вырождается в двухпозиционный регулятор. В ряде случаев, при малом транспортном запаздывании, статическая ошибка не превышает необходимую величину, поэтому П- регуляторы находят некоторое применение.
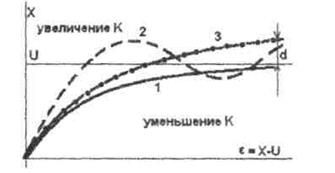
Рисунок 6.7 - Процесс регулирования П - регулятором при скачкообразном изменении задания с 0 до U (разгонная кривая).
Для устранения статической ошибки d при формировании выходной величины Y вводят интегральную (И) составляющую отклонения от задания:
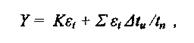
где tn - постоянная интегрирования сигнала; ∆tu - время между двумя соседними измерениями; ∑εi - накопленная между двумя соседними измерениями сумма рассогласований.
Таким образом, чем больше время, в течение которого величина X меньше задания U, тем больше интегральная составляющая и тем больше выходной сигнал Y. Регулятор с таким законом формирования выходного сигнала называется пропорционально-интегральным ПИ-регулятором.
В установившемся режиме (d = 0) в интеграторе имеется величина ∑εi/tn содержащая в себе накопленную ошибку регулирования, которая является дополнительным источником, ускоряющим регулятор к достижению заданного значения регулируемой величины.
Для достижения установившегося режима в интеграторе требуется достаточно большее время. Поэтому ПИ-регулятор можно применять в случае, когда и внешние воздействия достаточно медленные. В случае резких изменений внешних и внутренних факторов (например, налили холодной воды в бак или резко изменили задание) ПИ-регулятору требуется время для компенсации этих изменений.
Для ускорения реакции САР на внешние воздействия и изменения в задании в регулятор вводят дифференциальную составляюшую(Д):

где td - постоянная дифференцирования сигнала
Регулятор с таким законом управления называется ПИД- регулятором. Дифференциальная составляющая зависит от скорости изменения рассогласования ∑εi/tu Она вызывает реакцию регулятора на резкое изменение регулируемого параметра, возникшее, например, для случая охлаждения помещения, в результате открытия дверей и окон при сильном холодном ветре.
Подобрав для конкретного объекта К, tu и td, можно оптимизировать качество работы регулятора: уменьшить время выхода на задание, снизить влияние внешних возмущений уменьшить отклонение от задания.
При очень большом tu регулятор медленно выводит объект на задание. При малом tu происходит перерегулирование, т.е. регулируемый параметр X проскакивает задание, а затем сходится к нему.
В реальных системах применяют различные сочетания ПИД -законов регулирования. Отдельно П, И и Д законы применяются достаточно редко. В зависимости от объекта и необходимого качества регулирования возможны сочетания: ПИ, ПД, ДИ, ПИД.
Выбор регулятора для конкретного объекта зависит от его свойств, которые в определяются его динамической характеристикой.
П- регуляторы используются в объектах с небольшим запаздыванием и изменением нагрузки, а также в системах, где допускается статическая ошибка и не используются при циклическом изменении параметров объекта.
И- регуляторы используются для объектов с самовыравниванием и небольшими запаздыванием и изменением нагрузки.
ПИ- регуляторы применяются в объектах с любой емкостью, с большим запаздыванием, а также при больших и медленных изменениях нагрузки.
ПИД- регуляторы применяются в объектах с любой емкостью, при требуемой малой статической ошибке регулирования и при больших запаздываниях в объекте.
Двухпозиционные релейные регуляторы рекомендуется применять в объектах с большой емкостью.
Дата добавления: 2015-04-21; просмотров: 2582;