Характеристики объекта управления
Каждый объект регулирования можно охарактеризовать одним или несколькими количественными и качественными параметрами. Такие величины, как производительность, мощность, расход, влажность продукта, скорость и т.д. изменяются в широких пределах. Законы этих изменений во времени произвольны и носят случайный характер. Однако можно выделить ряд величин, которые присущи любому объекту автоматического управления.
Емкость объекта. Уравнение динамики объекта регулирования в общем виде можно записать (для бесконечно малого отрезка времени, когда зависимость между входными и выходными параметрами можно считать линейной): dy/dt = с dE/dt,
где dy/dt t - скорость изменения регулируемого параметра;
с - постоянная объекта, называемая емкостью объекта, характеризующая его способность запасать энергию;
Е = E1- E2 - подводимая и отводимая к объекту энергия.
Если dE > 0, то в объекте накапливается энергия, что сопровождается увеличением регулируемого параметра у.
Если dE < 0, то запас энергии в объекте снижается, т. е. регулируемый параметр уменьшается.
Для многих объектов величины подводимой и затрачиваемой энергии в той или иной степени зависят от значения регулируемого параметра.
Условие E1 = E2 соответствует состоянию равновесия объекта. При отклонении регулируемого параметра у от заданного у0 в ту или иную сторону равновесие объекта нарушается.
Если объект накапливает один вид энергии, то он называется одноемкостным, если несколько - многоемкостным (например, LRC контуры - магнитная, тепловая и электрическая энергия).
Механические объекты, например резервуар, обладают способностью накапливать в себе жидкость, газ, сыпучие тела. Понятие емкости здесь связано с объемом резервуара. Печь, термо-стат, сушильный шкаф способны накапливать тепло. Понятие их
емкости связано с теплоемкостью и т. д..
Время разгона — это время, в течение которого регулируемый. параметр у изменяется от нуля до номинального значения у при максимальном возмущении или управлении при условии, что скорость изменения dy/dt остается в течение этого времени постоянной, рис. 6.1. Время разгона Тр может быть определено экспериментально по переходной характеристике y(t). Для одноемкостного объекта оно может быть определено как Tp=Tа/k, где Та - постоянная времени объекта; к- тангенс угла наклона касательной в начальной точке t=0
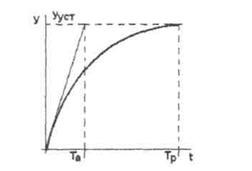
Рисунок 6.1 - К определению времени разгона.
Чувствительность объекта. Чувствительность, или скорость разгона, объекта представляет величину, обратную времени разгона е = 1/Тр
Постоянная времени объекта представляет собой время, в течение которого регулируемый параметр достигает нового установившегося значения при неизменных притоке и расходе вещества или энергии для данного объекта, лишенного самовыравнивания. Значение Та можно принимать равным Та =(0,25...0.33)Тр
Самовыравнивание объекта - это свойство объекта после возникновения возмущения приходить в состояние равновесия без внешнего вмешательства (без регулятора), причем каждому возмущению соответствует свое значение установившегося регулируемого параметра. Оценивается самовыравнивание степенью или коэффициентом самовыравнивания (иногда его называют коэффициентом статизма или саморегулирования).
Запаздывание в объекте. Одной из важнейших характеристик объекта регулирования является его запаздывание. Сущность его состоит в том, что с увеличением или уменьшением нагрузки (расходе энергии, вещества) в объекте параметры изменяют свое значение не сразу, а спустя некоторое время с момента возмущения. При этом различают (аналогично, как и для систем автоматического управления) два вида запаздывания: транспортное и переходное, определяемые свойствами объекта.
Дата добавления: 2015-04-21; просмотров: 1967;