Аппроксимация уравнения гиперболического типа
Построение алгебраических уравнений на основе дифференциального уравнения гиперболического типа (1) выполняется, так же как и в предыдущем случае, заменой производных конечно-разностными аналогами. В качестве примера рассмотрим задачу продольных колебаниях тонкого однородного стержня длиной L, когда его деформация u зависит только от продольной (вдоль оси стержня) координаты х и времени t.
Колебания стержня описываются дифференциальным уравнением
 (6.75)
(6.75)
где  , E и
, E и  - модуль упругости и плотность материала стержня.
- модуль упругости и плотность материала стержня.
Аппроксимация уравнения производится на сетке в координатах t и х. Примерный вид сетки показан на рис. 6.6. Данная задача не имеет верхней границы по координате t. Это объясняется тем, что с формальной точки зрения колебания в стержне могут продолжаться неопределенно долгое время, даже если будут учтены потери, приводящие к их затуханию.
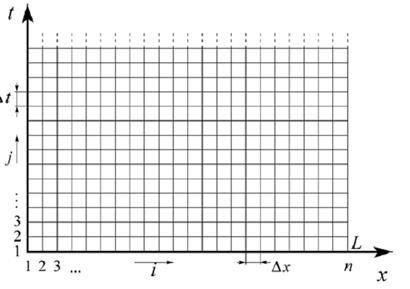
Рис. 6.6 ‑ Сетка в координатах t и x
Используя сетку, запишем в конечных разностях уравнение, эквивалентное (6.75):
 (6.76)
(6.76)
или
 (6.77)
(6.77)
где  . Из (6.76) и (6.77) видно, что форма шаблона уравнения гиперболического типа подобна форме шаблона ура внения эллиптического типа.
. Из (6.76) и (6.77) видно, что форма шаблона уравнения гиперболического типа подобна форме шаблона ура внения эллиптического типа.
Аналогично предыдущей задаче запишем уравнение (6.77) для каждого узла сетки и, подставляя в него вместо i и j соответствующие этим узлам номера, получим систему связанных алгебраических уравнений.
В качестве граничных условий по x в данной задаче могут использоваться любые условия, описывающие способ закрепления стержня. Например, жесткое закрепление предполагает нулевой сдвиг на концах стержня. Это соответствует условию u(x=0,t) = 0 и u(x=L,t) = 0, где x = 0 и x = L - координаты концов стержня.
По времени t в качестве начальных условий зададим при t = 0 исходную деформацию стержня и начальную скорость его колебаний
 (6.78)
(6.78)
Решение системы уравнений для рассматриваемой задачи можно получить с помощью сравнительно простой процедуры, называемой явной схемой. Эта схема строится на том, что все уравнения системы последовательно связаны между собой.
Расчет будем проводить в следующем порядке. Вначале определим деформацию стержня в моменты t = 0 и  . Для t = 0 деформация
. Для t = 0 деформация  известна из заданных начальных условий (6.78). Для следующего момента времени
известна из заданных начальных условий (6.78). Для следующего момента времени  деформацию
деформацию  определим с помощью второго начального условия, задающего скорость
определим с помощью второго начального условия, задающего скорость  при t = 0:
при t = 0:
 тогда
тогда  (6.79)
(6.79)
При известных из (6.78) и (6.79) ui,1 и ui,2 начнем решение задачи следующим образом. Полагая, что j = 2, то есть ui,j-1 = ui,1 и ut,j = ui,2, подставим в (6.77) известную из (6.78) соответствующую t = 0 начальную деформацию  , и соответствующую деформацию (см. (6.78)). Вычисление правой части (6.77) позволяет определить
, и соответствующую деформацию (см. (6.78)). Вычисление правой части (6.77) позволяет определить  в момент времени
в момент времени  .
.
Далее действуя аналогично и сдвигая шаблон решения на одну линию сетки по координате t, вычисляются последовательно фазы колебаний ui,4 - из ui,2 и ui,3, затем ui,5 - из ui,3 и ui,4 и так далее. То есть очередной временной слой j+1 рассчитывается из предыдущих с индексами j и j-1.
При решении гиперболического уравнения следует обращать внимание на выбор шага сетки по x и t. Теоретически можно показать, что приближенное решение, получаемое с помощью (6.77), сходится к точному при  и
и  со скоростью
со скоростью  если
если  . Иначе говоря, если выбран шаг сетки
. Иначе говоря, если выбран шаг сетки  по координате x, то появляется ограничение на шаг по времени
по координате x, то появляется ограничение на шаг по времени  t.
t.
При  метод становится неустойчивым как в абсолютном, так и в относительном смысле. Последнее означает, что по мере продолжения вычислений ошибки катастрофически нарастают. Теоретически показано, что при в = 1 метод устойчив и конечно-разностное решение совпадает с точным. При
метод становится неустойчивым как в абсолютном, так и в относительном смысле. Последнее означает, что по мере продолжения вычислений ошибки катастрофически нарастают. Теоретически показано, что при в = 1 метод устойчив и конечно-разностное решение совпадает с точным. При  решение хотя и устойчиво, но его точность с уменьшением
решение хотя и устойчиво, но его точность с уменьшением  убывает.
убывает.
Дата добавления: 2015-04-03; просмотров: 2261;