КИНЕМАТИКА СК
Устройство СК включает механизм (рисунок 11), преобразующий вращательное движение вала привода в возвратно-поступательное движение точки подвеса штанг. Кинематическая схема преобразующего механизма СК представляет четырехзвенник ОАВО1, неподвижное его звено– ОО1 длиной Р1 соединяющий ось качения балансира с осью кривошипа, а подвижные звенья – кривошип r, шатун L и заднее плечо балансира k.
При вращении кривошипа точка А описывает окружность радиуса r, а точка В сочленения шатуна с балансиром движется по дуге радиуса k. Проекция точки А на линию ВО совершает гармоничное колебательное движение, изображаемое синусоидой.
Точки А и В соединены между собой шатуном, который при вращении кривошипа изменяет угол наклона  с линией ВО.
с линией ВО.
Задачей кинематического анализа является получение зависимостей, определяющих закон движения точки подвеса штанг. Такими законами будут- путь, скорость и ускорение (см. рисунок 19).
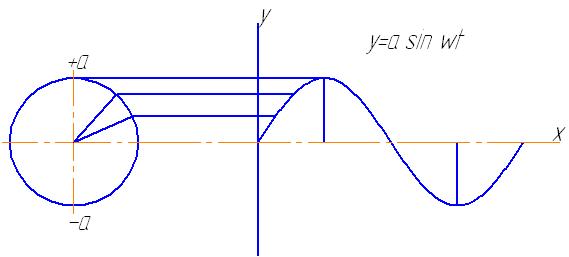
Рисунок 19- График пути точки «А» станка-качалки.
Дата добавления: 2015-04-15; просмотров: 2088;