КИНЕМАТИКА 4 страница
Решение. Опять рассмотрим механическую систему, состоящую из плиты и груза D), и изобразим действующие на нее внешние силы  ,
,  и реакцию
и реакцию  (рис. Д2а). Для определения N1 воспользуемся теоремой о движении центра масс системы и составим дифференциальное уравнение его движения в проекции на ось у:
(рис. Д2а). Для определения N1 воспользуемся теоремой о движении центра масс системы и составим дифференциальное уравнение его движения в проекции на ось у:
 или
или  , (9)
, (9)
где m — масса системы; Р1 = m1g; Р2 = m2g. Из формулы, определяющей ординату  центра масс системы, следует, что для рассматриваемой системы
центра масс системы, следует, что для рассматриваемой системы  где, как видно из рис. Д2а,
где, как видно из рис. Д2а,  ,
,  . Тогда, используя равенство (7), получим
. Тогда, используя равенство (7), получим
 .
.
Вычисляя производные и учитывая, что h = const, получим
 ,
,
 .
.
Подставив это значение  в равенство (9), найдем зависимость N от t и из нее, полагая t = t1 = 2 с, определим искомую величину N1.
в равенство (9), найдем зависимость N от t и из нее, полагая t = t1 = 2 с, определим искомую величину N1.
Ответ: N1 =197,3 Н.
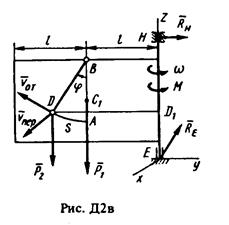
4. Определение угловой скорости ω. Плита вращается вокруг оси z, лежащей в плоскости плиты (рис. Д2в), и в момент времени t0 =0, когда угловая скорость плиты равна ω0, на нее начинает действовать вращающий момент М.
Дано: дополнительно к условиям (1): ω0 = 5 c-1 , M = kt, где k = 10 Н*м/с.
0пределить: ω = f(t) — зависимость угловой скорости плиты от времени.
Решение. Рассмотрим механическую систему, состоящую из плиты и груза D, и изобразим действующие на нее внешние силы: силы тяжести  ,
,  и реакции
и реакции  и
и  подпятника и подшипника и вращающий момент М.
подпятника и подшипника и вращающий момент М.
Для определения ω применим теорему об изменении кинетического момента системы относительно оси z. Предварительно заметим, что так как силы и , параллельны оси z, а реакции и эту ось пересекают, то их моменты относительно оси z равны нулю. Тогда  и теорема дает
и теорема дает
 или
или  . (10)
. (10)
Умножая обе части этого уравнения на dt и интегрируя, получим
 . (11)
. (11)
Для рассматриваемой механической системы 
где  и
и  — кинетические моменты относительно оси z плиты и груза О соответственно. Поскольку плита вращается вокруг оси z, то
— кинетические моменты относительно оси z плиты и груза О соответственно. Поскольку плита вращается вокруг оси z, то
 , где
, где  . (13)
. (13)
Для определения рассмотрим движение груза как сложное, считая его движение по отношению к плите относительным, а вращение плиты вокруг оси z — переносным движением. Тогда  по теореме Вариньона,
по теореме Вариньона,
 . (14)
. (14)
Но вектор  лежит в одной плоскости с осью z и, следовательно,
лежит в одной плоскости с осью z и, следовательно,  . Вектор
. Вектор  направлен перпендикулярно плите (как ось Х, если осьь Y в плоскости плиты); по модулю
направлен перпендикулярно плите (как ось Х, если осьь Y в плоскости плиты); по модулю  . Тогда
. Тогда  . Но из рис. Д2в видно, что DD1 =l + l sin φ. Взяв значение sin φ из формулы (3) и подставив все найденные величины в равенство (14), получим
. Но из рис. Д2в видно, что DD1 =l + l sin φ. Взяв значение sin φ из формулы (3) и подставив все найденные величины в равенство (14), получим
 . (15)
. (15)
Зная и [формулы (13) и (15)], найдем из равенства (12) значение Kz., тогда уравнение (11) примет вид
 . (16)
. (16)
или при числовых значениях задачи
Постоянную интегрирования определим по начальным условиям: при t = 0 ω = ω0 = 5 с-1 ; получим С1 = 128. При этом значении С, из уравнения (16) находим искомую зависимость ω от t.
Ответ:
 .
.
Примечание. Из полученного результата можно найти и значение ω1 при t = t1. Но если по условиям задачи одновременно М = 0, то уравнение (10) дает Кz = const, и тогда обычно проще не искать зависимость ω от t в общем виде, а сначала определить положение груза D npu t = 0 (т.е. угол φ0 ) и вычислить значение Kzo при φ = φ0 и ω =ω0 с помощью равенств, аналогичных (11) — (15); затем определить положение груза при t = t1 (угол φ1) и тем же путем найти Kz1 при φ = φ1 и ω = ω1. Так, в рассмотренном примере при t = 0 будет φ0 = π/2 и DD1 = 2l (рис Д2в),а при t = t1 = 2 с будет φ1 = — π/6 и DD1 =l/2. Тогда
 ,
,  .
.
Значение ω1 находится из равенства Kz1 = Кzо.
Задача Д3
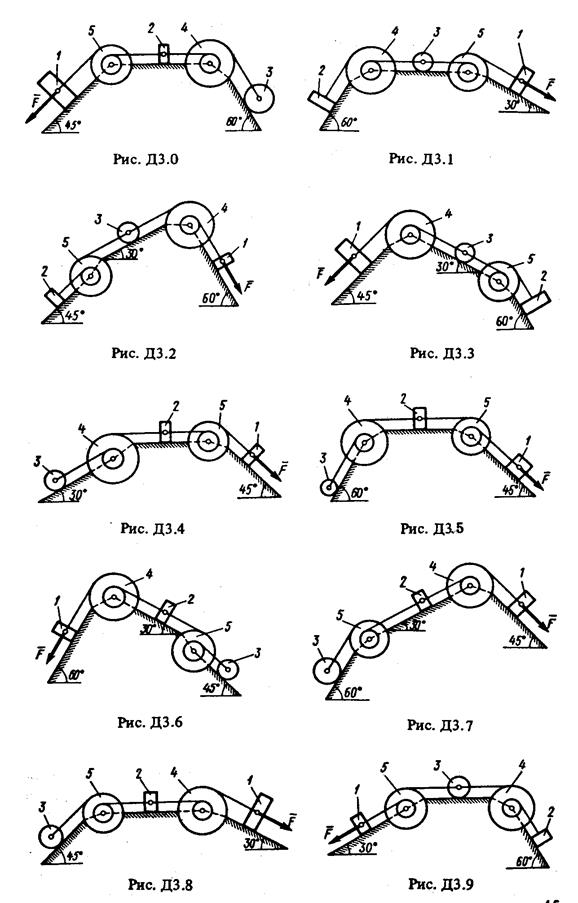
Механическая система состоит из грузов 1 и 2 (коэффициент трения грузов о плоскость f = 0,1), цилиндрического сплошного однородного катка 3 и ступенчатых шкивов 4 и 5 с радиусами ступеней R4 = 0,3 м, г4 = 0,1 м, Rs = 0,2 м, rs = 0,1 м (массу каждого шкива считать равномерно распределенной по его внешнему ободу) (рис. ДЗ.О-Д3.9, табл. ДЗ). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям
Таблица ДЗ
| Номер условия | m1 кг | m2 кг | m3 кг | m4 кг | m5 кг | M4 Н*м | M5 Н*м | F = f(f), Н | S1 м | Найти |
| 0,8 | 50(2+ 3s) | 1,0 | 
| |||||||
| 0,6 | 20(5 + 2s) | 1,2 | 
| |||||||
| 0,4 | 80(3 + 4s) | 0,8 | 
| |||||||
| 0,3 | 40(4 + 5i) | 0,6 | 
| |||||||
| 0,6 | 30(3 + 2s) | 1,4 | 
| |||||||
| 0,9 | 40(3 + 5s) | 1,6 |
| |||||||
| 0,8 | 60(2 + 5s) | 1,0 |
| |||||||
| 0,6 | 30(8 + 3s) | 0,8 |
| |||||||
| 0,3 | 40(2 + 5s) | 1,6 |
| |||||||
| 0,4 | 50(3 + 2s) | 1,4 |
|
Под действием силы F = f (s) , зависящей от перемещении точки приложения силы, система приходит в движение из состояния покоя. При движении системы на шкивы 4 и 5 действуют постоянные моменты сил сопротивлений, равные соответственно M4 и Ms,
Определить значение искомой величины в тот момент времени, когда перемещение точки приложения силы  равно s1. Искомая величина указана в столбце "Найти" таблицы, где обозначено: V1 - скорость груза 1, VC3 - скорость центра масс катка 3, ω4 - угловая скорость тела 4 и т.д.
равно s1. Искомая величина указана в столбце "Найти" таблицы, где обозначено: V1 - скорость груза 1, VC3 - скорость центра масс катка 3, ω4 - угловая скорость тела 4 и т.д.
Указания. Задача ДЗ - на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия системы равна сумме кинетических энергий всех входящих в систему тел: эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. П0440и вычислении кинетической энергии катка, движущегося плоскопараллельно, для установления зависимости между его угловой скоростью и скоростью его центра масс воспользоваться понятием о мгновенном центре скоростей (кинематика). При определении работы все перемещения следует выразить через заданное перемещение s1, учтя, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями.
Когда по данным таблицы m2 = 0, груз 2 на чертеже не изображать; шкивы 4 и 5 всегда входят в систему.
Пример ДЗ. Механическая система (рис, ДЗ) состоит из сплошного цилиндрического катка /, ступенчатого шкива 2 с радиусами ступеней R2 и r2 (масса шкива равномерно распределена по его внешнему ободу) и груза 3 (коэффициент трения груза о плоскость равен f). Тела системы соединены друг с другом нитями, намотанными на шкив 2.
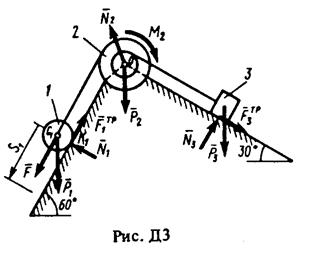
Под действием силы F = зависящей от перемещения s точки ее приложения, система приходит в движения из состояния покоя. При движении на шкив 2 действует постоянный момент М2 сил сопротивления.
Дано: m1 = 4 кг, m2 = 10кг, m3 = 8 кг. R2 = 0,2 м, r2 = 0,1 м, f = 0,2, М2 = 0,6 Н • м, F = = 2(1 + 2s) Н, sl = 2м,
Определить: скорость VC1 центра масс катка, когда s = s1
Решение. 1. Рассмотрим движение неизменяемой механической системы, состоящей из теп 1, 2. 3, соединенных нитями. Изобразим все действующие на систему внешние силы: активные  , момент сопротивления М2, реакции
, момент сопротивления М2, реакции  и силы трения
и силы трения  и
и 
Для определения VC1 воспользуемся теоремой об изменении кинетической энергии системы
 . (1)
. (1)
2. Определяем Т0 и Т. Так как в начальный момент система находилась в покое, то Т0 = 0. Величина T равна сумме энергий всех тел системы:
 (2)
(2)
Учитывая, что тело 1 движется плоскопараллельно, тело 3 - поступательно, а тело 2 вращается вокруг неподвижной оси, получим
 ,
,  ,
,  (3)
(3)
Все входящие сюда скорости следует выразить через искомую VC1. Приняв во внимание, что точка K1 - мгновенный центр скоростей катка 1, и обозначив радиус катка через г1, получим
 ,
, 
 . (4)
. (4)
Кроме того, входящие в (3) моменты инерции имеют значения
 ,
,  (5)
(5)
Подставив все величины (4) и (5) в равенство (3), а затем используя равенство (2), получим окончательно:
3. Теперь найдем сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда точка С1 пройдет путь s . Одновременно все перемещения следует выразить через заданную величину s1 , для чего учтем, что здесь зависимость между перемещениями будет такой же. как и между соответствующими скоростями в равенствах (4). т.е.  В результате получим:
В результате получим:
 ,
,  ,
,


Работа остальных сил равна нулю, так как точка К1, где приложены  , и - мгновенный центр скоростей, точка О. где приложены и
, и - мгновенный центр скоростей, точка О. где приложены и  . неподвижна, а реакция
. неподвижна, а реакция  , перпендикулярна перемещению груза 3. Тогда окончательно
, перпендикулярна перемещению груза 3. Тогда окончательно
 (7)
(7)
4. Подставив выражения (6) и (7) в уравнение (I) и учитывая, что T0 = 0, получим
 (8)
(8)
При числовых значениях, которые имеют заданные величины, равенство (8) дает  . Отсюда находим искомую скорость. Ответ;
. Отсюда находим искомую скорость. Ответ;  = 1,53 м/с.
= 1,53 м/с.
Дата добавления: 2015-06-17; просмотров: 1151;