КИНЕМАТИКА 2 страница
1. Определяем сначала угловые скорости всех колес как функции времени t. Зная закон движения рейки 1, находим ее скорость:  . (1)
. (1)
Так как рейка и колесо 2 находятся в зацеплении, то υ2 = υ1 или ω2R2= v1. Но колеса 2 и 3 тоже находятся в зацеплении, следовательно, и2 = υ3 или ω2r2 = ω3R3. Из этих равенств находим
 . (2)
. (2)
Тогда для момента времени t1 = 3 с получим ω3 = 6,75 с -1.
2. Определяем υ4. Так как υ4 = υB= ω3r3, то при t1 = 3 с υ4 = 20,25 см/с.
3. Определяем ε3. Учитывая второе из равенств (2), получим ε3 =  = 1,5t. Тогда при t1 = 3 с ε3 = 4,5 с -2.
= 1,5t. Тогда при t1 = 3 с ε3 = 4,5 с -2.
4. Определяем aА. Для точки A  , где численно
, где численно  = R3ε3,
= R3ε3,  =
=  . Тогда для момента времени t1 = 3 с имеем
. Тогда для момента времени t1 = 3 с имеем
= 36 см/с2, = 364,5 см/с2 ;
 = 366,3 см/с2.
= 366,3 см/с2.
Все скорости и ускорения точек, а также направления угловых скоростей показаны на рис. К2.
О т в е т: ω3 = 6,75 с -1, υ4 = 20,25 см/с, ε3 = 4,5 с -2,  =366,3 см/с2.
=366,3 см/с2.
Задача К3
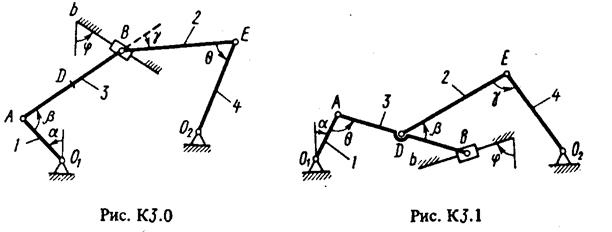
Плоский механизм состоит из стержней 1 — 4 и ползуна В, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами (рис. К3.0 — К3.9). Длины стержней: l1 = 0,4 м, l2 = 1,2 м, l3 = 1,4 м, l4 = 0,8 м. Положение механизма определяется углами α, β, γ, φ, θ, которые вместе с другими величинами заданы в табл. К2. Точка D на всех рисунках иточка К на рис. К3.7-К3.9 в середине соответствующего стержня.
| Таблица К3 | |||||||||
| Номер условия | Углы | Дано | Найти | ||||||

| 
| 
| 
|  
| ω1 | ω4 | 
| ||

|
| 
| |||||||
| - | - | 
| |||||||
| - | - | 
| |||||||
| - | - | 
| |||||||
| - | - |
| |||||||
| - | - | 
| |||||||
| - | - | 
| |||||||
| - | - | 
| |||||||
| - | - |
| |||||||
| - | - |
| |||||||
| - | - |
|
Определить:величины, указанные в таблице в столбце "Найти". Найти также ускорение aA точки А стержня l , если стержень 1 имеет в данный момент времени угловое ускорение ε1= 10 с2.
Дуговые стрелки на рисунках показывают, как при построении чертежа должны откладываться соответствующие углы, т.е. по ходу илипротив хода часовой стрелки (например, угол т на рис. 1 следует отложить от стержня DE против хода часовой стрелки, а на рис. 2 — от стержня АЕ по ходу часовой стрелки).
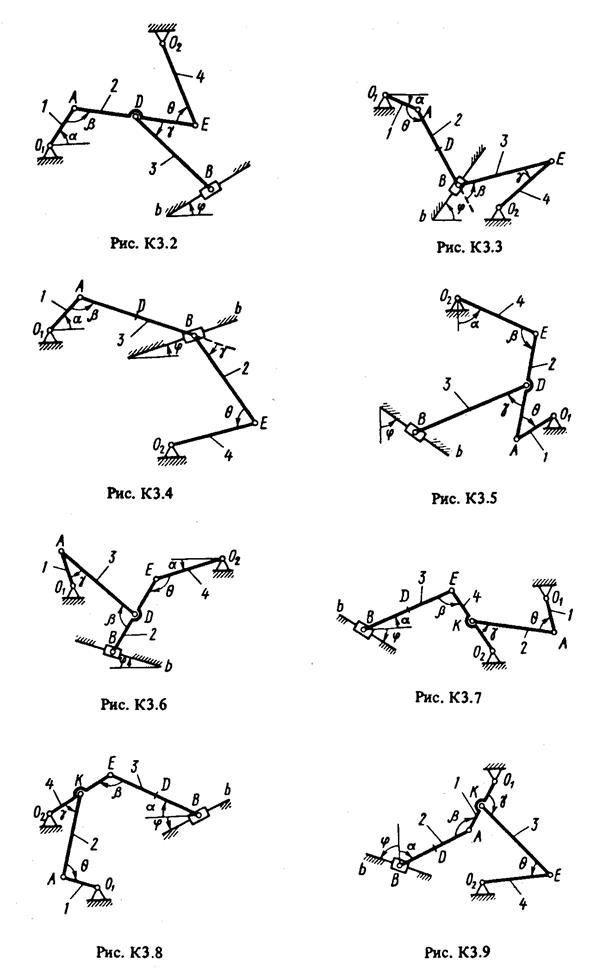
Построение чертежа начинать со стержня, направление которого определяется углом а; ползун В и его направляющие для большей наглядности изобразить, как в примере К3 (см. рис. К3). Заданную угловую скорость считать направленной против хода часовой стрелки, а заданную скорость VB — от точки В к b.
Указания. Задача К3 — на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.
Пример К3.Механизм (рис. К, а) состоит из стержней 1, 2, 3. 4 и ползуна В, соединенных друг с другом ис неподвижными опорами О, и О, шарнирами.
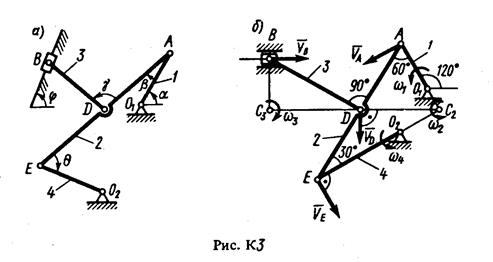
Д а н о: α = 1200, β = 600, γ = 900, φ = 00, θ = 300, AD = DE, 11 = 0,6 м, 13 = 1,2 м, ω1 = 5 c-1, ε1 = 8 c-2.
Определить: VB,VE, ω3 и аA.
Решение. 1. Строим положение механизма в соответствии с заданными углами (рис. К3, б).
2. Определяем VE. Точка Е принадлежит стержню АЕ. Чтобы найти VE, надо знать скорость какой-нибудь другой точки этого стержня и направление VE. По данным задачи можем определить
VA = ω1l1= 5* 0,6 = 3 м/с; 
 (1)
(1)
Направление  найдем, учтя, что точка Е принадлежит одновременно стержню O2 Е,вращающемуся вокруг О2 ;следовательно,
найдем, учтя, что точка Е принадлежит одновременно стержню O2 Е,вращающемуся вокруг О2 ;следовательно,  . Теперь, зная и направление воспользуемся теоремой о проекциях скоростей двух точек тела (стержня АЕ) на прямую, соединяющую эти точки (прямая АЕ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки) . Затем, вычисляя эти проекции, находим
. Теперь, зная и направление воспользуемся теоремой о проекциях скоростей двух точек тела (стержня АЕ) на прямую, соединяющую эти точки (прямая АЕ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки) . Затем, вычисляя эти проекции, находим
 ;
;  м/с (2)
м/с (2)
3. Определяем  . Точка В принадлежит стержню ВD. Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки D, принадлежащей одновременно стержню АЕ. Для этого, зная и , построим мгновенный центр скоростей (МЦС) стержня АЕ; это точка С2, лежащая на пересечении перпендикуляров к и восставленных из точек А и Е (к и перпендикулярны стержни 1 и 4) . По направлению вектора определяем направление поворота стержня АЕ вокруг МЦС С2. Вектор
. Точка В принадлежит стержню ВD. Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки D, принадлежащей одновременно стержню АЕ. Для этого, зная и , построим мгновенный центр скоростей (МЦС) стержня АЕ; это точка С2, лежащая на пересечении перпендикуляров к и восставленных из точек А и Е (к и перпендикулярны стержни 1 и 4) . По направлению вектора определяем направление поворота стержня АЕ вокруг МЦС С2. Вектор  будет перпендикулярен отрезку С2 D, соединяющему точки D и С2, и направлен в сторону поворота. Величину ) найдем из пропорции
будет перпендикулярен отрезку С2 D, соединяющему точки D и С2, и направлен в сторону поворота. Величину ) найдем из пропорции
 (3)
(3)
Чтобы вычислить С2 D и С2 А, заметим, что ∆ А С2 Е — прямоугольный, так как острые углы в нем равны 300 и 600, и что С2 А=
= АЕ * sin 30 = 0,5 AE=АD. Тогда ∆ А С2 D является равносторонними С2 А = С2 D. В результате равенство (3) дает
 м/с;
м/с;  (4)
(4)
Так как точка В принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно, то направление  известно. Toгда, восставляя из точек В и D перпендикуляры к скоростям и , построим МЦС С3 стержня BD. По направлению вектора определяем направление поворота стержня BD вокруг центра С3. Вектор будет направлен в сторону поворота стержня BD. Из рис. К3, б видно, что
известно. Toгда, восставляя из точек В и D перпендикуляры к скоростям и , построим МЦС С3 стержня BD. По направлению вектора определяем направление поворота стержня BD вокруг центра С3. Вектор будет направлен в сторону поворота стержня BD. Из рис. К3, б видно, что
∟ С3 D B = 300, а ∟ D C3 В = 900, откуда С3 В = l3 sin 300, С3 D = l3 cos 300. Составив теперь пропорцию, найдем, что
 ;
;  м/с (5)
м/с (5)
4. Определяем aA. Так как МЦС стержня 3 известен (точка С3), то
 c-1
c-1
5. Определяем aA. Так как ε1, известно, то  = l1 * ε1. Далее
= l1 * ε1. Далее  =
=  , или = l1ω21. Тогда
, или = l1ω21. Тогда  . Произведя вычисления, получим aA = 15,8 м/c2
. Произведя вычисления, получим aA = 15,8 м/c2
О т в е т:  = 5,2 м/с, = 1,7 м/с,
= 5,2 м/с, = 1,7 м/с,  = 2,9 с-1, aA = 15,8 м/c2
= 2,9 с-1, aA = 15,8 м/c2
Задача K4
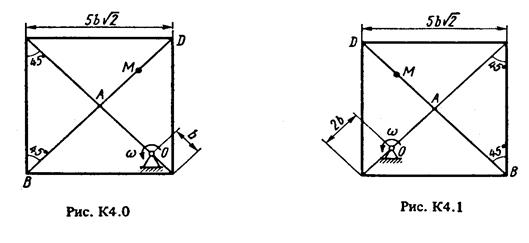
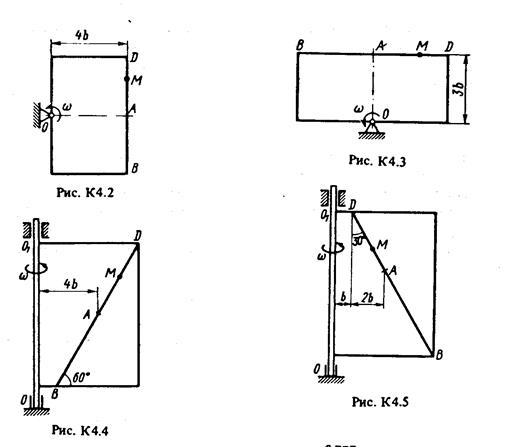
Прямоугольная пластина (рис. К4.0-К4.5) или круглая пластина радиусом R = 60 см (рис. К4.6 — К4.9) вращается вокруг неподвижной оси с постоянной угловой скоростью ω, заданной в табл. КЗ (при знаке минус направление ω противоположно показанному на рисунке).
Ось вращения на рис. К4.0 — К4.З и К4.8, К4.9 перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на рис. К4.4 — К4.7 ось вращения ОО1 лежит в плоскости пластины (пластина вращается в пространстве) .
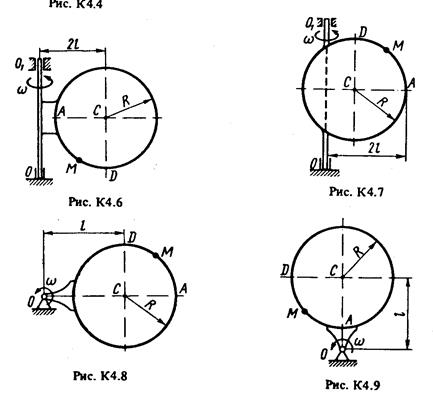
Таблица К4
| Номер условия | ω, 1 /с | Рис. 0-5 | Рис. 6-9 | ||
| b, см | s = AM = f(t) | l | 
| ||
| -2 | 
| R | 
| ||

| R | 
| |||
| R | 
| |||
| -4 | 
| 
| 
| ||
| -3 | 
| R | 
| ||

| R | 
| |||
|
|

| |||
| -5 | 
| R | 
| ||

| R/4 | 
| |||
| -5 | 
| 
| 
|
По пластине вдоль прямой В D (рис. К4.0 — К4.5) или по окружности радиуса R, т.е. по ободу пластины (рис. К4.6 — К4.9), движется точка М. Закон ее относительного движения, выражаемый уравнением s = AM = = f (t) (s — в сантиметрах, t — в секундах), задан в табл. К4 отдельно для рис. К4.0 — К4.5 и для рис. К4.6-К4.9, при этом на рис. 6-9 s = AM и отсчитывается по дуге окружности; там же даны размеры b и l. На всех рисунках точка М показана в положении, при котором s = АМ > 0 (при s > 0 точка М находится по другую сторону от точки А) .
Определить абсолютную скорость и абсолютное ускорение точки М в момент времени t1 = 1 с.
Указания. Задача К4 — на сложное движение точки. При ее решении движение точки по пластине считать относительным, а вращательное движение самой пластины — переносным и воспользоваться теоремами о сложении скоростей и о сложении ускорений. Прежде чем производить расчеты, следует изобразить точку М на пластине в том положении, в котором нужно определить ее абсолютную скорость (или ускорение), а не в произвольном положении, показанном на рисунках к задаче.
В случаях, относящихся к рис. К4.6 — К4.9, при решении задачи не подставлять числового значения R, пока не будут определены положение точки М в момент времени t1 = 1 с и угол между радиусами СМ и СА в этот момент.
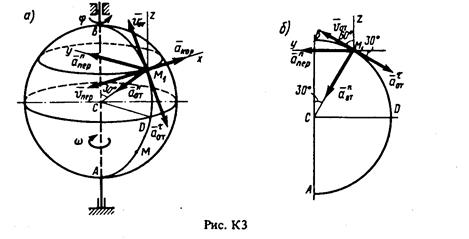
Пример К4. Шар радиуса R (рис. К4, а) вращается вокруг своего диаметра АВ по закону φ = f1 (t) (положительное направление отсчета угла у показано на рис. К4, а дуговой стрелкой) . По дуге большого круга ("меридиану") ADB движется точка М по закону s =АМ= f2 (t); положительное направление отсчета расстояния s от А к D.
Дано: R = 0.5 м, φ = -2t, s=(πR/6)(7t — 2t2 ) (φ — в радианах, s - в метрах, t — в секундах)
Определить:  и
и  в момент времени t1 = 1 с.
в момент времени t1 = 1 с.
Решение. Рассмотрим движение точки М как сложное, считая ее движение по дуге A D B относительным (АВ — относительная траектория точки), а вращение шара — переносным движением. Тогда абсолютная скорость  и абсолютное ускорение
и абсолютное ускорение  точки найдутся по формулам
точки найдутся по формулам
 ,
,  , (1)
, (1)
где, в свою очередь,
 ,
, 
Определим все характеристики относительного и переносного движений.
1. Относительное движение. Это движение происходит по закону
 (2)
(2)
Сначала установим, где будет находиться точка М на дуге ADB в момент времени t1. Полагая в уравнении (2) t = 1 с, получим  . Тогда ∟ A C M1 =
. Тогда ∟ A C M1 =  или ∟ B C M = 300. Изображаем на рис. К4, а точку в положении, определяемом этим углом (точка М1).
или ∟ B C M = 300. Изображаем на рис. К4, а точку в положении, определяемом этим углом (точка М1).
Теперь находим числовые значения  ,
,  ,
,  :
:
 ,
,  ,
,
 ,
,
где  — радиус кривизны относительной траектории, т.е. дуги ADB. Для момента времени t1 = 1 с, учитывая, что А = 0,5 м, получим
— радиус кривизны относительной траектории, т.е. дуги ADB. Для момента времени t1 = 1 с, учитывая, что А = 0,5 м, получим
 м/с,
м/с,  м/с,
м/с,  м/с. (3)
м/с. (3)
Знаки показывают, что вектор  направлен в сторону положительного отсчета расстояния s, а вектор
направлен в сторону положительного отсчета расстояния s, а вектор  — в противоположную сторону; вектор
— в противоположную сторону; вектор  направлен к центру С дуги ADB. Изображаем все эти векторы на рис. К4, а. Для наглядности приведен рис. К4, б, где дуга АРВ совмещена с плоскостью чертежа.
направлен к центру С дуги ADB. Изображаем все эти векторы на рис. К4, а. Для наглядности приведен рис. К4, б, где дуга АРВ совмещена с плоскостью чертежа.
2. Переносное движение. Это движение (вращение) происходит по закону φ = -2t. Найдем угловую скорость ω и угловое ускорение ε переносного вращения: ω =  = — 2, ε =
= — 2, ε =  = 0 (шар вращается равномерно) . Таким образом,
= 0 (шар вращается равномерно) . Таким образом,
ω = -2 с-1, ε =0 (4)
Знак указывает, что направление ω противоположно положительному направлению отсчета угла φ; отметим это на рис. К4, а соответствующей дуговой стрелкой.
Для определения  и
и  найдем сначала расстояние h точки М1 от оси вращения: h = R sin 300 = 0,25 м. Тогда в момент времени t1 = 1 с, учитывая равенства (4), получим
найдем сначала расстояние h точки М1 от оси вращения: h = R sin 300 = 0,25 м. Тогда в момент времени t1 = 1 с, учитывая равенства (4), получим
 м/с,
м/с,
 ,
,  м/с2 (5)
м/с2 (5)
Изображаем на рис. К4, а вектор с учетом направления ω и вектор (направлен к оси вращения).
3. Кориолисово ускорение. Так как угол между вектором  и осью вращения (вектором
и осью вращения (вектором  ) равен 600, то численно в момент времени t1 = 1 с [см. равенства (3) и (4)]
) равен 600, то численно в момент времени t1 = 1 с [см. равенства (3) и (4)]
 м/с2 (6)
м/с2 (6)
Направление  найдем, спроектирован вектор на плоскость, перпендикулярную оси вращения (проекция направлена так же, как вектор
найдем, спроектирован вектор на плоскость, перпендикулярную оси вращения (проекция направлена так же, как вектор  ), и повернув затем эту проекцию в сторону ω, т.е. по ходу часовой стрелки, на 900. Иначе направление можно найти, учтя, что
), и повернув затем эту проекцию в сторону ω, т.е. по ходу часовой стрелки, на 900. Иначе направление можно найти, учтя, что  . Изображаем вектор на рнс. К4, а.
. Изображаем вектор на рнс. К4, а.
Теперь можно вычислить значения и
4. 0пределение. так как  ,а векторы и взаимно перпендикулярны (см. рис. К4, а), то в момент времени t1 = 1 с
,а векторы и взаимно перпендикулярны (см. рис. К4, а), то в момент времени t1 = 1 с
 м/с2
м/с2
5. 0пределение . По теореме о сложении ускорений, так как  = 0,
= 0,
 (7)
(7)
Для определения проведем координатные оси М1 x y z (рис. КЗ, а)
и вычислим проекции вектора на эти оси. Учтем при этом, что вектор лежит на проведенной оси х, а векторы , , расположены в плоскости дуги ADB, т.е. в плоскости М1 y z (рис. К4, б). Тогда, проектируя обе части равенства (7) на координатные оси и учтя одновременно равенства (3), (5), (6), получим для момента времени t1 = 1 с:
 м/с2,
м/с2,
 м/с2,
м/с2,
 м/с2
м/с2
Отсюда находим значение в момент времени t, = 1 с:
Дата добавления: 2015-06-17; просмотров: 1449;