Інженерні методи розрахунку аналогових фільтрів
Проектуючи фільтр, інженер зіштовхується з необхідністю погодження вимог до обробки сигналу з тим, що можна реалізувати наявними засобами. Нерідко буває так, що введення в характеристики фільтра найпростіших обмежень, спрямованих на задоволення поставлених вимог до обробки сигналу, приводить до того, що такий фільтр виявляється фізично нереалізуємий (рекурсивні, не рекурсивні цифрові фільтри, мінімально фазові, не мінімально фазові, нестійкі фільтри).
Перший етап проектування фільтру – оцінка порогу мінімальної усталеної похибки відтворення сигналу на фоні перешкоди фізично нереалізуємою системою.
Другий етап апроксимації - побудова стійкої, фізично реалізуємої електронної системи, коли усталена похибка збільшується за рахунок виконання умови фізичної реалізації. В залежності від прийнятого критерію не завжди виконуються умови обмежень, зокрема динамічні показники не задовольняють заданим значенням. Особливо при зростанні відносного рівня перешкод та збільшення ступеню регулярності сигналу системи характеризуються підвищеним рівнем коливальності.
Третій етап – корекція динамічних показників для забезпечення гарантованої якості перехідних процесів за допомогою допоміжного критерію, що збільшує усталену похибку.
Такі задачі можна вирішувати в просторі часу, в операторній формі або з допомогою передавальних функцій або в просторі змінних стану.
Для рішення дуже розповсюдженої інженерної задачі, зв'язаної з розрахунком фільтра, коефіцієнт передачі якого повинний мати задані характеристики в різних частотних діапазонах, маються те, що добре себе зарекомендували методи проектування. Ці методи спираються на ряд стандартних функціональних побудов, що дозволяють реалізувати основні функції фільтрів.
Проектування більшості типів фільтрів починається з їхньої апроксимації у виді фільтра нижніх частот з нормованою ідеалізованою характеристикою. Нормований ідеальний фільтр нижніх частот має одиничний коефіцієнт передачі в смузі частот від 0 до 1 рад/с і нульовий коефіцієнт передачі на всіх частотах, великих 1 рад/с. Фазове зрушення для такого фільтра являє собою лінійну функцію, що має одиничний тангенс кута нахилу в смузі пропускання. Для частот, що перевищують 1 рад/с, фазове зрушення не має значення, оскільки на таких частотах фільтр усе рівно не пропускає сигналу. Таким чином, нормований ідеальний фільтр нижніх частот визначається в такий спосіб:
 для
для  , (8.1)
, (8.1)
 для
для  .
.
Модуль коефіцієнта передачі і фазове зрушення обумовлені вираженнями (8.1) зображені на рисунку 8.1.
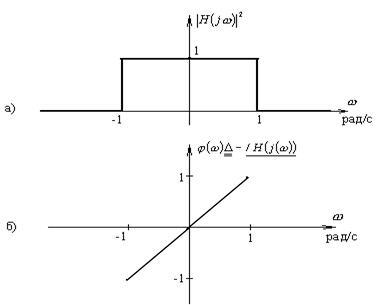
Рис. 8.1 – Частотні характеристики нормованих ідеальних фільтрів нижніх частот.
Як тільки отримали фільтр нижніх частот з нормованою ідеалізованою характеристикою, відразу ж можна застосувати придатні частотні перетворення за допомогою яких цей базовий фільтр нижніх частот може бути перетворений у фільтр верхніх частот, смуговий, загороджуючий й ін.
Дата добавления: 2015-06-27; просмотров: 683;