Стохастика каналів керування першого порядку
Методологія синтезу статистичного фільтра залишається такою ж, тому вкажемо лише основні його моменти та відмінності.
Приклад 2. Нехай діапазон статистичних характеристик корисної складової керуючих впливів, що пересилаються по працюючому в режимі керування інформаційному каналу, як і раніше є:
 . (4.1)
. (4.1)
Одначе некорельована перешкода тут надбає специфічні обриси – це білий шум інтенсивності  ,
,
 (4.2)
(4.2)
Тоді сигнал керування та його Фур’є – вираз:
 (4.3)
(4.3)
Після перетворень:
 . (4.4)
. (4.4)
Виконаємо операцію факторизації:
Після факторизації (4.5)
 . (4.6)
. (4.6)
Отже:
 . (4.7)
. (4.7)
Сепарація: після розкладення (4.7) на елементарні дроби:
 (4.8)
(4.8)
Частотна характеристика шуканого статистичного фільтра:
 (4.9)
(4.9)
Останній вираз отриманий з врахуванням (4.3), котрий можна переписати наступним чином:
 , (4.10)
, (4.10)
ν– дисперсійне співвідношення «корисний сигнал–шум». Тоді:
 . (4.11)
. (4.11)
Разом дає передавальну функцію інерційної ланки:
 (4.12)
(4.12)
Статистичний фільтр каналів керування – це інерційний підсилювач з коефіцієнтом підсилення k, величина котрого обумовлена дисперсійними характеристиками входу Z(t). Його функціональний еквівалент може бути уявлений як інтегратор с негативним зворотнім зв’язком.
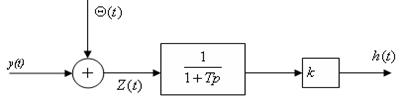
а) Розімкнена оптимальна система
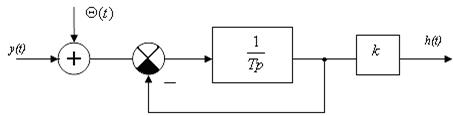
б) Оптимальна система зі зворотнім зв’язком
Рис. 4.1. Варіанти безперервної статистичної фільтрації.
Підрахуємо помилку фільтрації  , де. Тоді
, де. Тоді
 , (4.13)
, (4.13)
 , (4.14)
, (4.14)
де  квадрат модуля частотної характеристики фільтра.
квадрат модуля частотної характеристики фільтра.

тому що:
 .
.
Взявши інтеграл, отримаємо
 (4.15)
(4.15)
Таким чином, дисперсія помилки виділення корисного сигналу оптимальною системою (рис. 2.8.):
або з врахуванням (4.11):
 (4.16)
(4.16)
Параметром, який визначає оптимальний фільтр в кожному конкретному випадку, є дисперсійне відношення n.
1)  відсутність перешкоди (ціна молодшого розряду перетворювачів на виході УСО та ЕОМ достатньо мала), тоді згідно (4.11) та (4.16) K=1; Т=0;
відсутність перешкоди (ціна молодшого розряду перетворювачів на виході УСО та ЕОМ достатньо мала), тоді згідно (4.11) та (4.16) K=1; Т=0;  , тобто
, тобто  безінерційний підсилювач з одиничним коефіцієнтом підсилення. Дисперсія похибки дорівнює нулю.
безінерційний підсилювач з одиничним коефіцієнтом підсилення. Дисперсія похибки дорівнює нулю.
2) ν – кінцева → шум квантування помітний, ним не можна знехтувати. K<1; 0<  < ;
< ;  інерційний підсилювач з параметрами, визначеними за (4.11), (4.16).
інерційний підсилювач з параметрами, визначеними за (4.11), (4.16).
3) ν→0 нескінченно велика перешкода. Тоді  та
та  .
.
Оптимальна система (рис. 2.8.) працює як вентиль, що замикається, охороняючи інформаційний канал від перевантажуючих його перекручень.
Дата добавления: 2015-06-27; просмотров: 757;