Фундаментальные принципы управления
| № задачі | ||||||||||||||||||||||
| № варіанта | Тпоч., год | t”, год | Р”, Р/год | 1, км | Р1, Р/год | Р2, Р/год | Р3, Р/год | Р4, Р/год | Р5, Р/год | t1, год | t2, год | t3, год | t4, год | t5, год | V, км/год | Д вст Р | tр, год | t”, год | Р”, Р/год | tn1 год | tn2 год | Д” вст Р |
| 1.0 | 2.0 | 0.13 | 0.13 | 1.3 | 0.12 | 1.15 | 1.25 | 1.5 | 1.75 | 2.0 | 2.75 | 1.5 | 7.0 | 1.5 | 2.0 | 1.0 | 5.0 | |||||
| 1.5 | 2.5 | 0.14 | 0.15 | 1.5 | 0.11 | 1.17 | 1.33 | 1.6 | 1.80 | 2.1 | 2.80 | 1.6 | 7.5 | 1.25 | 2.1 | 2.0 | 6.0 | |||||
| 2.0 | 3.0 | 0.16 | 0.17 | 1.7 | 0.13 | 1.18 | 1.35 | 1.7 | 1.85 | 2.2 | 2.85 | 1.7 | 9.0 | 1.5 | 2.2 | 3.0 | 6.5 | |||||
| 2.5 | 3.5 | 0.18 | 0.19 | 1.9 | 0.14 | 1.19 | 1.40 | 1.8 | 1.90 | 2.3 | 2.90 | 1.8 | 8.5 | 1.75 | 2.3 | 4.0 | 7.0 | |||||
| 3.0 | 4.0 | 0.20 | 0.21 | 2.1 | 0.15 | 1.20 | 1.45 | 1.9 | 1.95 | 2.4 | 2.95 | 1.9 | 9.0 | 2.0 | 2.4 | 5.0 | 7.5 | |||||
| 3.5 | 4.5 | 0.22 | 0.23 | 2.3 | 0.16 | 1.25 | 1.50 | 2.0 | 2.15 | 2.5 | 3.0 | 2.0 | 9.5 | 2.25 | 2.5 | 4.5 | 8.0 | |||||
| 4.0 | 5.0 | 0.24 | 0.25 | 2.3 | 0.17 | 1.30 | 1.55 | 2.1 | 2.25 | 2.6 | 3.05 | 2.1 | 10.0 | 2.5 | 2.6 | 4.0 | 8.5 | |||||
| 4.5 | 5.5 | 0.26 | 0.27 | 2.7 | 0.18 | 1.35 | 1.60 | 2.2 | 2.55 | 2.7 | 3.10 | 2.2 | 10.5 | 2.75 | 2.7 | 3.5 | 8.0 | |||||
| 5.0 | 6.0 | 0.28 | 0.29 | 2.9 | 0.19 | 1.40 | 1.65 | 2.3 | 3.05 | 2.8 | 3.15 | 2.3 | 11.0 | 3.0 | 2.8 | 3.0 | 8.5 | |||||
| 4.5 | 7.0 | 0.30 | 0.27 | 3.0 | 0.20 | 1.45 | 1.70 | 2.4 | 3.25 | 2.9 | 3.20 | 2.4 | 11.5 | 3.75 | 2.9 | 2.5 | 8.0 | |||||
| 4.0 | 8.0 | 0.32 | 0.25 | 3.1 | 0.21 | 1.50 | 1.75 | 2.5 | 3.45 | 3.0 | 3.25 | 2.5 | 12.0 | 2.5 | 2.8 | 2.0 | 7.5 | |||||
| 3.5 | 9.0 | 0.34 | 0.23 | 3.3 | 0.22 | 1.55 | 1.80 | 2.6 | 3.40 | 3.1 | 3.30 | 2.6 | 11.5 | 2.25 | 2.7 | 1.5 | 8.0 | |||||
| 3.0 | 1.0 | 0.36 | 0.21 | 3.1 | 0.23 | 1.60 | 1.85 | 2.7 | 3.35 | 3.2 | 3.35 | 2.7 | 11.0 | 2.0 | 2.6 | 2.0 | 8.5 |
Продовження табл.4.2
| 2.5 | 1.1 | 0.38 | 0.19 | 2.9 | 0.24 | 1.65 | 1.90 | 2.8 | 3.30 | 3.1 | 3.40 | 2.8 | 10.5 | 1.75 | 2.5 | 2.5 | 7.0 | |||||
| 2.0 | 1.2 | 0.40 | 0.17 | 2.7 | 0.25 | 1.70 | 1.95 | 2.9 | 3.25 | 3.0 | 3.45 | 2.9 | 10.0 | 1.5 | 2.4 | 3.0 | 8.5 | |||||
| 1.5 | 1.3 | 0.42 | 0.19 | 2.5 | 0.26 | 1.75 | 2.0 | 3.0 | 3.20 | 2.9 | 3.50 | 3.0 | 9.5 | 1.25 | 2.3 | 3.5 | 6.0 | |||||
| 1.0 | 1.4 | 0.44 | 0.21 | 2.3 | 0.27 | 1.80 | 1.95 | 3.1 | 3.15 | 2.8 | 3.55 | 2.9 | 9.0 | 1.5 | 2.2 | 4.0 | 5.5 | |||||
| 1.5 | 1.5 | 0.46 | 0.23 | 2.1 | 0.28 | 1.85 | 1.90 | 3.0 | 3.10 | 2.7 | 3.60 | 2.8 | 8.5 | 1.75 | 2.1 | 4.5 | 6.0 | |||||
| 2.0 | 2.0 | 0.48 | 0.25 | 2.0 | 0.29 | 1.90 | 1.85 | 2.9 | 3.05 | 2.6 | 3.65 | 2.7 | 8.0 | 2.0 | 2.0 | 5.0 | 7.5 | |||||
| 2.5 | 2.5 | 0.50 | 0.27 | 1.9 | 0.30 | 1.95 | 1.80 | 2.8 | 3.0 | 2.5 | 3.7 | 2.6 | 7.5 | 2.25 | 2.1 | 4.5 | 8.0 | |||||
| 3.0 | 3.0 | 0.48 | 0.29 | 1.8 | 0.29 | 2.0 | 1.75 | 2.7 | 2.95 | 2.4 | 3.75 | 2.5 | 7.0 | 2.5 | 2.2 | 4.0 | 8.5 | |||||
| 3.5 | 3.5 | 0.46 | 0.31 | 1.7 | 0.28 | 1.95 | 1.70 | 2.6 | 2.90 | 2.3 | 3.80 | 2.4 | 6.5 | 2.75 | 2.3 | 3.5 | 8.0 | |||||
| 4.0 | 4.0 | 0.44 | 0.33 | 1.6 | 0.27 | 1.80 | 1.65 | 2.5 | 2.85 | 2.2 | 3.85 | 2.3 | 6.0 | 3.0 | 2.4 | 3.0 | 7.5 | |||||
| 4.5 | 4.5 | 0.42 | 0.35 | 1.5 | 0.26 | 1.70 | 1.60 | 2.4 | 2.0 | 2.1 | 3.90 | 2.2 | 6.5 | 2.75 | 2.5 | 2.5 | 7.0 | |||||
| 5.0 | 5.0 | 0.40 | 0.37 | 1.4 | 0.25 | 1.60 | 1.55 | 2.3 | 2.75 | 2.0 | 3.95 | 2.1 | 7.0 | 2.5 | 2.6 | 2.0 | 6.5 | |||||
| 4.5 | 6.0 | 0.58 | 0.35 | 1.3 | 0.24 | 1.50 | 1.50 | 2.2 | 2.70 | 12.1 | 3.90 | 2.0 | 7.5 | 2.25 | 2.7 | 1.5 | 6.0 | |||||
| 4.0 | 7.0 | 0.36 | 0.33 | 1.2 | 0.23 | 1.40 | 1.45 | 2.1 | 2.65 | 2.2 | 3.85 | 1.9 | 8.0 | 2.0 | 2.8 | 2.0 | 7.5 | |||||
| 3.5 | 8.0 | 0.34 | 0.31 | 1.1 | 0.22 | 1.30 | 1.40 | 2.0 | 2.60 | 2.3 | 3.80 | 1.8 | 8.5 | 1.75 | 2.9 | 2.5 | 7.0 | |||||
| 3.0 | 9.0 | 0.32 | 0.29 | 1.0 | 0.21 | 1.20 | 1.35 | 1.9 | 2.55 | 2.4 | 3.75 | 1.7 | 9.0 | 1.5 | 3.0 | 3.0 | 8.0 | |||||
| 2.5 | 9.5 | 0.30 | 0.27 | 0.9 | 0.20 | 1.10 | 1.30 | 1.8 | 2.50 | 2.6 | 3.70 | 1.6 | 9.5 | 1.25 | 3.1 | 3.5 | 3.0 |
Фундаментальные принципы управления
Существует два фунд. принципа управления: -принцип разомкнутого управления; - принцип замкнутого управления.
Принцип раз. управления
Первый вид систем разомкнутого управления – управление по управляющему воздействию на систему.
Общая управляющая функциональная схема систем разомкнутого управления:
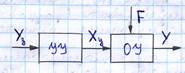
Где УУ-управляющее устройство; ОУ- объект управления; Уз – вектор управляющих воздействий на систему; Ху- вектор управляющих воздействий на объект; F-вектор возмущающих воздействий на систему; У-вектор управляемых величин
В таких системах управляющее воздействие на объект формируется в зависимости от упр-ющего возд-вия на систему. Следов., для управления не используют значение упр-емых вел-н возм-ющих возд-вий. А из этого следует, что точность таких систем не очень высокая, поскольку возмущающие возд-вия так же могут существенно влиять на упр-ющие.
Второй случай разомкнутого управления – управление по возм-ющему возд-вию (принцип компенсации возм-ющего возд-вия)
Общая функциональная схема:
 |
ДF ¾ датчик возмущающего воздействия; Ф ¾ устройство, формирующее управляющее воздействие на объект; ХF – сигнал датчика
В системах с этим принципом управления упр-ющее возд-вие на объект формируется в зависимости от отклонения возм-ющего возд-вия от некоторой принятой величины возм-ющего возд-вия. В таких системах компенсируются только главные возмущающие возд-вия (их влияние) – это снижает точность управления таких систем.
Принцип замкнутого управления (принцип управления по ошибке или принцип управления по отклонению)
Общая функциональная схема:
 |
З ¾ задатчик (программатор); СУ ¾ сравнивающие устройство; Ду ¾ датчик управляемой величины; Хз , Хд, ес ¾ сигнал задатчика, датчика и ошибки
Ошибка системы е является разностью между заданным значением упр-емой вел-ны Хз и действительным ее значением У. Эта разность вычисляется сравнивающим устройством СУ в виде разности сигнала задатчика и сигнала датчика и преобразования их разности в сигнал ошибки ес:
Уз – У = е = Кд * ес
Системы с этим принципом управления работают следующим образом:
датчиком измеряется упр-емая вел-на. Сравнивающим устройством вычисляется ошибка (сигнал) и упр-ющее воздействие на объект формируется так, чтобы ликвидировать эту ошибку. Поэтому точность управления таких систем в установившемся режиме наиболее высока и не зависит от изменения возм-ющего возд-вия. Обратная связь, проходящая через датчик Ду, называется главной обратной связью. Эта обр. связь передает сигнал с выхода системы на ее вход. Поэтому такие системы называют системами с замкнутым управлением.
Принцип комбинированного управления
Иногда при мощных возм-ющих возд-виях контур управления по ошибке не успевает быстро ликвидировать возникшие ошибки или, если система является статической, может работать с большой статической ошибкой. Для ликвидации этих явлений применяют комбин-ное управление – упраление одновременно и по ошибке и по возм-ющему возд-вию.
Функ. схема:
 |
Дата добавления: 2015-02-28; просмотров: 1022;