Oslash; Органы управления
Служат для получения от оператора и передачи в систему управления командной информации. На входе в органы управления – перемещение, выполняемое рукой (в некоторых случаях – ногой) оператора, на выходе – изменение электрической энергии (в настоящем курсе речь идет только об органах управления электрических систем). Отсюда функциональные требования к органам управления, в первую очередь, они должны соответствовать требованиям эргономики (науки о взаимодействии человека и машины), во вторую – соответствовать по параметрам управляемой электрической цепи. К эргономическим требованиям относятся ограничения по расположению органов управления, траектории и усилию управляющего перемещения. Органы управления должны быть не только удобно расположены, в их размещении должна учитываться их иерархия по степени ответственности. В размещении и конструкции органов управления должны быть предусмотрены и дополнительные меры, например, рабочая поверхность кнопок, ложное нажатие на которые может привести к серьезным последствиям, должна утапливаться внутрь защитного барьера; кнопки аварийной остановки наоборот должны выступать из этого барьера, выделяться габаритом и цветом (так называемые грибковые стоповые кнопки); тумблера должны располагаться так, чтобы избежать их случайного включения, например, локтем или обшлагом рукава. По усилию, потребному для перемещения, органы управления разделяются на ручные, кистевые, пальцевые, ножные (для перемещения необходимо усилие соответствующего органа). При всех прочих условиях, скорость психомоторной реакции ноги выше, чем руки, поэтому органы управления, требующие более быстрой реакции, предпочтительно делать ножными (именно поэтому в автомобиле установлена педаль тормоза, а не рычаг). По траектории потребного перемещения органы управления разделяются на нажимные (кнопка, клавиша), поворотные (рычаг, педаль), вращательные (штурвал, маховик), линейного перемещения (ползун). В электрическом плане органы управления разделяются на обладающие дискретной (переключатели) и плавной (регуляторы) характеристикой. Первые представляют собой по сути дела конечные выключатели или реле с приводом от оператора (см. лекции 4 и 8). Вторые – потенциометры, регулируемые катушки индуктивности или конденсаторы, т. е. датчики перемещения с приводом от оператора. Ниже рассмотрим наиболее типовые электрические органы управления.
Кнопки. На рис. 95,а приведена конструкция наиболее простой электрической кнопки серии КМЕ так называемого толчкового типа – группы из нормально замкнутого и нормально разомкнутого контактов, управляемых пальцем оператора. Эта кнопка находится во включенном положении, пока на нее нажимает оператор. Поэтому, когда нужно обеспечить длительную работу управляемого устройства при кратковременном нажатии кнопки, применяют специальную схему включения кнопки: с блокировкой при помощи шунтирующей цепи. Известны и более сложные конструкции кнопок – с механической и электромагнитной блокировкой во включенном состоянии. У кнопок с механической блокировкой в механизм переключения встроена так называемая защелка Меламеда: храповое устройство, обеспечивающее при первом нажатии замыкание кнопки, а при повторном – ее размыкание (аналогичная защелка применяется в некоторых типах шариковых ручек). У кнопок с электромагнитной блокировкой (рис. 95,б) в толкатель контактной группы встроен сердечник электромагнита, а катушка электромагнита включена в управляемую кнопкой цепь.
| а | б | в |
| 
| 
|
| г | Рис. 95. Кнопки управления: а – толчковая; б – с электромагнитной блокировкой; в – герконовая; г – схема внешней блокировки реле К1 | |
|
При нажатии кнопки на электромагнит подается напряжение и он удерживает кнопку в нажатом положении. Для размыкания цепи, управляемой толчковой кнопкой или кнопкой с электромагнитной блокировкой, необходимо внешнее устройство. Конструкция толчковых кнопок предусматривает установку дополнительных контактных групп для управления от одной кнопки несколькими цепями. Достоинством данных типов кнопок является большая коммутируемая мощность – до сотен ватт, недостатками – большие габариты и ограничение срока службы из-за выгорания контактов от искрения при срабатывании. Помимо кнопок с обычными электрическими контактами известны герконовые и сенсорные кнопки.
Герконовые кнопки аналогичны по конструкции магнитозамыкаемым герконовым конечным выключателям (см. лекция 4). Управляющий постоянный магнит крепится к толкателю кнопки (рис. 95,в). Герконовые кнопки обладают высокой надежностью, малогабаритны и получили достаточно большое распространение (например, в клавиатуре ЭВМ). К их недостаткам можно отнести относительно небольшую коммутируемую мощность и недостаточную универсальность – каждая кнопка представляет собой один нормально разомкнутый контакт.
 При бесконтактном сенсорном управлении состояние выходной цепи изменяется не при контакте пальца оператора с кнопкой, а только при поднесении его к ней.
При бесконтактном сенсорном управлении состояние выходной цепи изменяется не при контакте пальца оператора с кнопкой, а только при поднесении его к ней.
Наиболее простая схема сенсорного управления приведена на рис. 96. Схема представляет собой мост индуктивностей, одна из которых – L1 – прикреплена с внутренней стороны к панели управления. Панель управления изготовлена из магнито-прозрачного материала и с внешней стороны на нее нанесена марки-ровка кнопки. В исходном состоянии мост находится в балансном состоянии и по измерительной диагонали 1–2 ток не течет. Коэффициент магнитной проницаемости m человеческого тела выше, чем воздуха, поэтому при поднесении пальца к индуктивности L1 ее индуктивное сопротивление изменяется, и мост выходит из состояния баланса. На измерительной диагонали, следовательно, на входе в усилитель У (как правило, полупроводниковый однокаскадный) появляется отпирающее напряжение. Сопротивление выходной цепи между клеммами 3 и 4 резко уменьшается – выходная цепь отпирается. Сенсорные кнопки обладают самой высокой надежностью среди рассмотренных: в них нет ни одной подвижной детали и ни одного электрического контакта. К недостаткам можно отнести малую коммутируемую мощность, следовательно, необходимость дополнительного усиления сигнала управления.
 Тумблеры. Представляют собой пальцевые рычажные переключатели. Могут быть двухпозиционными и трехпозиционными (с нейтральным положением), с фиксацией в нажатом положении и возвратом в нейтральное, выводами под пайку и винтовыми клеммами. Внешний вид и схемы контактов тумблера приведены на рис. 97.
Тумблеры. Представляют собой пальцевые рычажные переключатели. Могут быть двухпозиционными и трехпозиционными (с нейтральным положением), с фиксацией в нажатом положении и возвратом в нейтральное, выводами под пайку и винтовыми клеммами. Внешний вид и схемы контактов тумблера приведены на рис. 97.
Переключатели являются многопозиционными (от 3 до 12 позиций) поворотными пальцевыми органами управления. Внешний вид и схема контактов приведены на рис. 98.
Потенциометры служат для настройки и плавной регулировки какого-либо электрического параметра путем изменения активного сопротивления. Подразделяются на поворотные и линейные (ползунковые). У поворотных потенциометров сопротивление как правило угольное. Иногда угольное сопротивление делается переменным по сечению для придания нелинейного вида характеристике  – сопротивление, j – угол поворота.
– сопротивление, j – угол поворота.
Контроллеры – многопозиционные силовые переключатели. На рис. 99 приведены внешний вид и схема рычажного контроллера управления двигателем подъема башенного крана. Более подробно об управлении пуском трехфазного асинхронного двигателя с фазным ротором будет рассказано в дисциплине «Управление техническими системами».
а 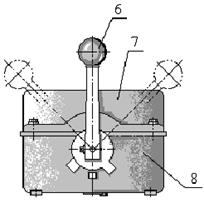
| б 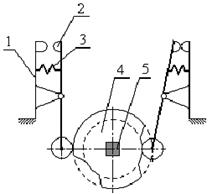
|
| Рис. 99. Кулачковый контроллер ККТ-61 и его контактная система: а – внешний вид; б – контрактная группа; 1 – неподвижный контакт; 2 – подвижный контакт; 3 – приводная пружина; 4 – управляющий кулачок; 5 – вал; 6 – рычаг управления; 7 – крышка; 8 – корпус |
 Педали. На рис. 100 приведена переключающая педаль на базе специализированного кранового конечного выключателя
Педали. На рис. 100 приведена переключающая педаль на базе специализированного кранового конечного выключателя
КУ-70  (пустая позиция – номер исполнения). Педали для плавного регулирования представляют собой комбинацию из собственно педали, механической передачи и поворотного потенциометра.
(пустая позиция – номер исполнения). Педали для плавного регулирования представляют собой комбинацию из собственно педали, механической передачи и поворотного потенциометра.
Сельсинные командоаппараты. Являются плавными регуляторами. В отличие от потенциометров представляют собой бесконтактные приборы управления. Основой является сельсинная пара, работающая в генераторном режиме (подробнее – см. лекцию 5). Управляющий элемент соединен с ротором сельсин – датчика. При повороте ротора в линиях связи сельсинной пары появляется напряжение рассогласования, пропорциональное углу поворота ротора. Это напряжение и является управляющим сигналом командоаппарата.
Промышленностью выпускаются сельсинные командоаппараты серий СКАЗ, СКАР, СКАП. Последняя буква обозначения означает тип управляющего элемента (З – маховичный ручной, Р – рычажный ручной, П – педальный). Командоаппараты СКАЗ встраиваются в панель управления. Некоторые модификации СКАЗ имеют стрелочный указатель положения маховичка.
Дата добавления: 2015-01-21; просмотров: 3432;