Oslash; Датчики перемещения
В отличие от предыдущих датчики перемещения контролируют объект не в точке пространства, а на определенном участке его траектории. Этот участок именуется диапазоном измерения датчика. В зависимости от того, какого рода движение контролирует датчик, они подразделяются на линейные и поворотные. Все датчики перемещения являются параметрическими. Пропорционально изменению положения контролируемого объекта внутри диапазона измерения у них изменяется один из параметров выходной электрической цепи. В зависимости от вида изменяемого выходного параметра они подразделяются на датчики активного, индуктивного и емкостного сопротивления.
Датчики активного сопротивления подразделяются на датчики, контролирующие линейное перемещение объекта и поворотные. По материалу датчики подразделяются на металлические (проволочные) и угольные. Проволочные линейные датчики получили название реостаты. В электротехнике угольные поворотные датчики получили распространение в несвойственной им области – для изменения напряжения на объектах, последовательно или параллельно подключенных им. Отсюда второе название всей группы датчиков активного сопротивления – потенциометрические, т.е. изменяющие напряжение.
Линейные проволочные датчики активного сопротивления (реостаты). Конструкция реостата приведена на рис. 38,а. Основой его является катушка из лакированной проволоки, намотанной на диэлектрический сердечник. По катушке скользит подвижный контакт. На беговой дорожке контакта изоляционный лак удален. У этого и всех остальных типов датчиков активного сопротивления подвижный контакт именуется ламелью.
| а | б | в |

| 
| 
|
Рис. 38. Проволочные датчики активного сопротивления: а – проволочный линейный; б – проволочный поворотный; в – обозначения датчика на схемах
Поворотные проволочные датчики активного сопротивления. В отличие от предыдущих у этих датчиков ламель представляет собой поворотный рычаг достаточно большой длины (рис. 38,б). Беговая дорожка – дуга большого радиуса, приближенная к прямой. Конструктивно механическая часть этого датчика более проста. Вместе с тем зависимость сопротивления от угла поворота есть величина нелинейная, подчиненная синусоидальному закону, что необходимо учитывать при проектировании привода датчика. Пример применения – регистрирующая часть датчиков усилия и угла поворота стрелы ограничителя грузоподъемности ОГП-1 стреловых кранов.
Линейные и поворотные угольные датчики активного сопротивления. Неподвижным контактом у этих датчиков является не проволочная спираль, а угольная пластина клиновой формы. За счет изменения сечения неподвижного контакта при перемещении ламеля сопротивление датчика изменяется по более крутой, чем у проволочных датчиков, в зависимости от перемещения, т. е. они обладают большей чувствительностью. Эти датчики применяются в путевых машинах, например, как точные потенциометры положений нивелировочного троса рихтовочных систем машин ВПР02, ВПРС500
Общим достоинством для всех датчиков активного сопротивления является их универсальность – с равным успехом они применяются в цепях как постоянного, так и переменного тока. Недостатком их является трение между ламелью и беговой дорожкой, следовательно, износ контактов и искрение.
Индуктивные датчики перемещения. К ним относятся линейные датчики, поворотные трансформаторы и сельсины.
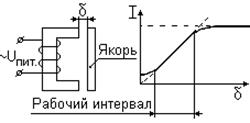
Линейные индуктивные датчики перемещения. Для точного измерения малых расстояний (например, в автоматизированных металлорежущих станках) служат датчики с переменным зазором. Одинарный датчик приведен на рис. 39,а. Выходной величиной является ток в индуктивной катушке
 , (20)
, (20)
где U – напряжение питания.
Входной величиной является зазор d между подвижным якорем и магнитопроводом. Характеристика датчика, т. е. зависимость I = F(d), формулы (17)–(20), имеет нелинейный характер. В цепях управления более предпочтительны устройства с линейной зависимостью выходной величины.
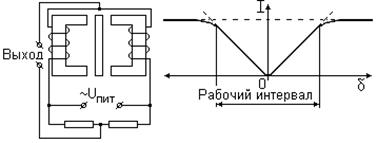
Для увеличения рабочего диапазона применяется дифференциальный индуктивный датчик (рис. 39,б). Он состоит из двух симметрично расположенных катушек индуктивности и общего якоря. Рабочий диапазон представляет собой две симметрично расположенные прямые линии, проходящие через начало координат.
| а | б |
| 
|
Рис. 39. Линейные индуктивные датчики перемещения: а – одинарный; б – дифференциальный
Для измерения расстояний, бóльших, чем в предыдущем случае, используются датчики с подвижным сердечником (рис. 40). Для датчиков такого типа формула (18) преобразуется в вид
 , (21)
, (21)
где l – длина магнитопровода, mS – суммарная магнитная проницаемость среды внутри катушки. Среда состоит из двух компонентов – на участке x – сердечник и воздушный зазор d, на участке (L–x ) – только воздух. Коэффициенты магнитной проницаемости: для воздуха – m = 1; для стали – m = 49800.

 , (22)
, (22)
где V – объем пространства внутри катушки.
Из формулы (22) видно, что датчик обладает нелинейной характеристикой. Тем не менее из-за достоинств, общих для всех индуктивных датчиков, использование их с подвижной катушкой при не очень высоких требованиях к точности измерений весьма эффективно.
Поворотные (вращающиеся) трансформаторы являются электрическими машинами с неявно выраженными полюсами и служат индуктивными датчиками угла поворота. Имеют неподвижный статор и вращающийся ротор, связанный с определяемым объектом. В пазы статора и ротора уложены по две взаимно-перпендикулярные обмотки, в статор – первичные, в ротор – вторичные. При изменении положения статора меняется и напряжение на выходе вторичных обмоток при неизменности напряжения на первичных. Так, для синусно-косинусного трансформатора СКВТ вторичное напряжение
 , (23)
, (23)
где U1 – первичное напряжение; a – угол поворота; kT – коэффициент трансформации при a = 0. Вид формулы (23) показывает, что характеристика вращающегося трансформатора нелинейна. Это является единственным недостатком данного датчика.
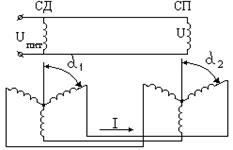
Сельсины представляют собой электрические микромашины с однофазной обмоткой возбуждения и трехфазной вторичной обмоткой. Полностью обратимы: в зависимости от условий могут применяться и как электродвигатели и как генераторы. Служат для измерения угловых перемещений. Принцип работы сельсина состоит в следующем. При включении статорной обмотки в сеть переменного тока напряжением Uп (рис. 41,а), она создает пульсирующий магнитный поток, который индуцирует в каждой фазе роторной обмотки эдс, зависящей от угла поворота ротора a:
 (24)
(24)
Величина напряжения в любой фазной обмотке позволяет судить об угле поворота ротора. Сельсины применяются попарно, причем один работает как электродвигатель, а другой – как генератор. Известны две схемы подключения сельсинов – индикаторная и трансформаторная.
| а | б | в |
| 
| 
|
Рис. 41. Схемы сельсинов: а – схема обмоток; б – индикаторная схема; в – трансформаторная схема
Индикаторная схема изображена на рис. 41,б и служит как синхронная система дистанционной передачи информации об угле поворота, например в приводе самописца, регистрирующего положение контрольной тележки путерихтовочной машины. Сельсин-пара состоит из сельсин-датчика (СД) и сельсин-приемника (СП). Все обмотки как возбуждения ОС1 и ОС2, так и вторичные ОР1 – ОР6 – соединены параллельно. При повороте ротора СД, работающего как генератор на угол a1, в цепях связи наводятся уравнительные токи I, стремящиеся повернуть ротор СП (электродвигателя) на угол a2.
Трансформаторная схема приведена на рис. 41,в. Она служит как датчик угла поворота, например, в системе регулирования тягового усилия неполноприводного тягача (система следит за рассогласованием частот вращения буксующих приводных и неприводных колес). В отличие от предыдущей схемы статорные обмотки разделены. Статорная обмотка СД подключена к питанию, статорная обмотка СП является выходной: с нее снимается напряжение Uвых. Для того чтобы схема работала в трансформаторном режиме, ротор СП должен быть заторможен. Схема представляет собой спаренный поворотный трансформатор. Поворот ротора СД вызывает в цепях связи уравнительные токи I. Так как ротор СП заклинен, уравнительные токи наводят в статорной обмотке СП электродвижущую силу (эдс) Uвых, пропорциональную углу поворота ротора СДК общим достоинствам индуктивных датчиков перемещения стоит отнести их высокую надежность и отсутствие подвижных электрических контактов, поэтому, нет износа и искрения. К недостаткам – ограничение по применимости (только в цепях переменного тока), высокие требования к стабильности частоты питающего напряжения.
Емкостные датчики перемещения.
Емкостное сопротивление конденсатора определяется по формуле
 , (25)
, (25)
где f – частота переменного тока, C – емкость конденсатора,
 , (26)
, (26)
где e – диэлектрическая постоянная материала диэлектрика; S – площадь пластин; d – зазор между пластинами. В емкостных датчиках перемещения используется изменение всех трех переменных правой части формулы (26).
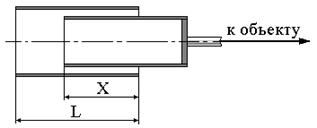
Емкостные датчики с переменной площадью пластин. На рис. 42,а изображен поворотный датчик (угол измерения – до 180°). Пластины поворотной и неповоротной части чередуются. Площадью пластин конденсатора является площадь перекрытия (заштрихована). Принцип действия линейного датчика понятен из рис. 42,б, здесь X – текущее значение перемещения, L – диапазон измерения.
| а | б |
| 
|
Рис. 42. Датчики с переменной площадью пластин: а – поворотные; б – линейные
Емкостные датчики с переменным зазором служат для точного измерения малых линейных перемещений. При перемещении подвижной пластины (или пакета пластин) изменяется зазор, следовательно, и емкость.
 Емкостные датчики с переменной диэлектрической проницаемостью среды служат для измерения уровня жидкости и представляют собой бак с центральным стержнем трубчатого сечения (рис. 43).
Емкостные датчики с переменной диэлектрической проницаемостью среды служат для измерения уровня жидкости и представляют собой бак с центральным стержнем трубчатого сечения (рис. 43).
Стенки бака являются одной из пластин конденсатора, стержень – другой. Так как жидкость и ее насыщенный пар обладают разными e, при изменении уровня жидкости емкость конденсатора и, следовательно, его емкостное сопротивление изменяются.
Главными достоинствами емкостных датчиков перемещения являются их высокая точность и отсутствие подвижных электрических контактов, т. е. отсутствие износа и искрения. Недостатком является ограниченность применимости – они достаточно эффективны только в высокочастотных цепях переменного тока.
Контрольные вопросы и задания
1. Назовите отличия датчиков положения и перемещения.
2. В чем главный недостаток датчиков положения прямого действия?
3. От чего зависит скорость размыкания контактов в датчике положения мгновенного действия?
4. Назовите достоинства и недостатки герконовых конечных выключателей.
5. В чем принцип действия мультивибратора ?
6. Каково условие открытости p–n–p-транзистора. Опишите режим «Выключено» бесконтактного выключателя.
7. Опишите режим «Включено» бесконтактного выключателя.
8. Назовите достоинства и недостатки датчиков перемещения активного сопротивления.
9. Назовите достоинства и недостатки индуктивных датчиков перемещения?
10. Какие ограничения применимости емкостных датчиков перемещения?
Дата добавления: 2015-01-21; просмотров: 4873;