Лекция 4 Датчики положения и перемещения
Датчики являются механическими аналогами рецепторов органов чувств. Они поставляют в систему управления информацию о внешней по отношению к управляемому устройству ситуации. Существуют и датчики, сигнализирующие о внутреннем состоянии объекта, например, давление масла в системе смазки двигателя внутреннего сгорания, положение подвижных звеньев манипулятора промышленного робота и так далее. Как многообразна физическая природа процессов, за которыми следят датчики, так многообразна и природа первичного сигнала на входе в датчик. Рассмотреть все многообразие датчиков в ограниченном объеме данного курса лекций невозможно, да и не нужно. Мы ограничимся датчиками, характерными для систем управления подъемно-транспортных, строительных, дорожных, путевых машин и технологического оборудования машиностроения, строительной индустрии и путевого хозяйства. Таковыми являются: дискретные датчики положения (конечные выключатели), датчики перемещения, скорости, усилия, ускорения, давления, температуры. С этими датчиками и ознакомимся в данной лекции.
Ø Дискретные датчики положения (конечные выключатели)
Данные датчики регистрируют наличие или отсутствие наблюдаемого объекта в определенной точке (дискрете) пространства. Эта точка именуется точкой настройки или точкой срабатывания датчика. Сигнал на входе датчика может принимать только два значения – «объекта в точке настройки нет» и «объект в точке настройки есть». Выходом датчика является участок электрической цепи. В зависимости от входного сигнала ситуация в выходной цепи может быть двух видов – «выходная цепь разомкнута» и «выходная цепь замкнута». Как правило, эти датчики регистрируют переход объектом границы опасной зоны или окончание рабочего хода объекта. Отсюда второе распространенное название дискретных датчиков положения – конечные выключатели. Непосредственно с датчиком контактируют управляющие элементы, крепящиеся к наблююдаемому объекту. Если объект в точке настройки прекращает движение (работает «в упор»), то управляющий элемент именуется упором. Если объект после контакта с датчиком может продолжить перемещение (работает «на проход»), то управляющий элемент называется линейкой. С целью более точной установки точки настройки, упоры и линейки делаются регулируемыми. Дискретные датчики положения являются очень распространенными элементами систем управления и в силу этого обладают большим разнообразием типов. Классификация дискретных датчиков положения приведена на рис. 29.
| Дискретные датчики положения | |||||||||
| Контактные (механические) | Герконовые | Бесконтактные | |||||||
| Прямого действия | Мгновенного действия | Магнитозамкнутые | Магнито-замыкаемые | Электронные | Индуктивные | ||||
| торцевые | щелевые | ||||||||
Рис. 29. Классификация дискретных датчиков положения
Контактные конечные выключатели прямого действия. У этих датчиков перемещение управляющего элемента механически жестко, напрямую, связанно с перемещением подвижного элемента выходной контактной группы (отсюда и название). Типичным представителем датчиков данного типа является конечный выключатель серии ВПК 21  . Последние две позиции в маркировке обозначают исполнение рабочей головки выключателя и типоразмер контактной группы.
. Последние две позиции в маркировке обозначают исполнение рабочей головки выключателя и типоразмер контактной группы.
Конструкция выключателя приведена на рис. 30,а. Плунжер 1 сменной рабочей головки 2 связан с ползуном 3 контактного мостика 4 через герметичную мембрану 5. Ползун снабжен возвратной пружиной 6. Во избежание поломки контактов при большом ходе плунжера контактный мостик снабжен компенсаторной пружиной 7. Контактный мостик может в зависимости от положения плунжера замыкать цепь или между нормально замкнутыми 8, или между нормально разомкнутыми 9 контактами. Все элементы, за исключением рабочей головки, размещаются в герметичном корпусе из силуминового сплава 10. Корпус снабжен тремя резьбовыми гнездами. При монтаже ненужные гнезда закрываются заглушками 11, а в остальные вворачиваются герметичные сальниковые вводы проводов 12. Так как электрическая часть выключателя полностью герметична, выключателю присвоена категория размещения У3 (под открытом небом, в умеренном климате).
а б
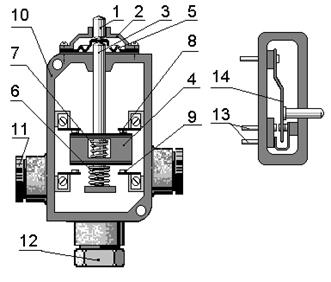
| Рис. 30. Дискретные контактные датчики положения: а – конечный выклюючатель ВПК 211; б – микропереключатель типа МП; 1 – плунжер; 2 – рабочая головка; 3 – ползун; 4 – контактный мостик; 5 – мембрана; 6 – возвратная пружина; 7 – компенсаторная пружина; 8 – нормально замкнутые контакты; 9 – нормально разомкнутые контакты; 10 – корпус; 11 – заглушка; 12 – сальниковый ввод; 13 – выходные клеммы; 14 – контактный мостик |
В нормальном состоянии выключателя контактный мостик замыкает контакты 8. При нажатии управляющим упором на плунжер сначала размыкаются контакты 8, а при продолжении хода плунжера – замыкаются контакты 9. Свободный ход поглощается пружиной 7.
Конечные выключатели серии ВПК соответствуют требованиям ГСП по унификации и поэтому являются объектами этой классификации. В целях повышения универсальности они выпускаются со сменными рабочими головками (рис. 31). Селективная (т. е. различающая направление движения управляющего элемента) головка (рис. 31, в) представляет собой двухзвеньевой ломающийся рычаг с роликом на конце. При прохождении управляющей линейки в рабочем направлении (на рисунке – слева направо), рычаг работает как одно целое, отклоняясь и нажимая на плунжер. При обратном проходе рычаг складывается, при этом первое звено не перемещается и срабатывания датчика не происходит. Конечные выключатели серии ВПК являются автономными герметичными приборами. В случае, если дискретный датчик положения является частью привода, металлоконструкции или датчика более сложного уровня, в его качестве используется микропереключатель.
Конструкция типового микропереключателя приведена на рис. 30,б. Как правило, микропереключатели обладают открытыми выходными клеммами 13 под пайку или болтовое присоединение проводов.
Датчики типа ВПК:
| а | б | в |
Датчики типа ВК:
| г | д |
Рис. 31. Рабочие головки и рычаги дискретных контактных датчиков положения: а – плунжерная; б – неселективная роликовая; в – селективная роликовая; г – неселективный; д – селективный
Электромеханическая часть микропереключателя не герметична. Возвратной пружиной зачастую является выполненный в виде рессоры из пермаллоя (железно-никелевый сплав, обладающий хорошими механическими, магнитными и электрическими свойствами) контактный мостик 14. Компенсаторные пружины, как правило, отсутствуют – в силу этого микропереключатели особенно чувствительны к точности установки управляющих элементов.
Общим достоинством контактных дискретных датчиков положения прямого действия является относительная простота конструкции. Конечные выключатели серии ВПК абсолютно автономны, обладают большим числом сменных рабочих головок и в силу этого универсальны. Микропереключатели проще, меньше по размерам, легче, но менее универсальны и негерметичны (могут располагаться только внутри герметичных привода, механизма, металлоконструкции и так далее). Недостатком дискретных датчиков положения прямого действия является зависимость срока службы датчика от скорости перемещения управляющего элемента. Так, для ВПК21 при скорости перемещения управляющего элемента более 0,5 м/с паспортная наработка на отказ составляет с 95-процентной вероятностью 20´106 циклов срабатывания. При меньшей скорости наработка на отказ уменьшается до 106 циклов. Дело в том, что при малых зазорах между контактами возникает электрический пробой воздушного слоя – искрение. При медленном расхождении контактов искрение происходит относительно длительное время, что приводит к выгоранию контактов.

 Контактные дискретные датчики положения мгновенного действия. В отличие от предыдущих, у датчиков данного типа механическая и контактная часть связаны не напрямую, а посредством специального механизма мгновенного действия. При этом замыкание-размыкание контактов происходит не со скоростью управляющего элемента, а с постоянной, достаточно высокой скоростью, задаваемой этим механизмом. Существует несколько типов таких механизмов. Один из них изображен на рис. 32. Кулиса 1 закреплена на одном валу с роликовым рычагом 2, непосредственно контактирующим с управляющим элементом. Внутри кулисы установлен подпружиненный пружиной 3 ползун 4. Ползун упирается в Т-образный контактный мостик 5. При повороте кулисы острие ползуна скользит по верхней перекладине мостика. При прохождении острием мертвой точки, мостик выходит из состояния устойчивого равновесия и со скоростью, задаваемой пружиной, перебрасывается в другое положение. Промышленностью выпускаются датчики положения мгновенного действия следующих типов: ВК-200; ВК-300; ВПК-11 – универсальные, общего назначения; КУ70 – специализированные крановые (пустые позиции – номер типоисполнения). Внешний вид конечного выключателя КУ701 приведен на рис. 33. Роликовые рычаги, характерные для датчиков мгновенного действия типов ВК и КУ, приведены на рис. 31, г, д. Селективный роликовый рычаг обладает скошенным роликом, подпружиненным пружиной кручения. При заходе управляющего элемента на ролик со стороны скоса (на рис. 31,д – слева) ролик поворачивается, пропуская упор без перемещения рычага. При заходе справа рычаг отклоняется, и датчик срабатывает. Срок службы этих датчиков не зависит от скорости перемещения управляющего элемента и составляет порядка 20´106 циклов срабатывания. Недостатком является относительная сложность механической части.
Контактные дискретные датчики положения мгновенного действия. В отличие от предыдущих, у датчиков данного типа механическая и контактная часть связаны не напрямую, а посредством специального механизма мгновенного действия. При этом замыкание-размыкание контактов происходит не со скоростью управляющего элемента, а с постоянной, достаточно высокой скоростью, задаваемой этим механизмом. Существует несколько типов таких механизмов. Один из них изображен на рис. 32. Кулиса 1 закреплена на одном валу с роликовым рычагом 2, непосредственно контактирующим с управляющим элементом. Внутри кулисы установлен подпружиненный пружиной 3 ползун 4. Ползун упирается в Т-образный контактный мостик 5. При повороте кулисы острие ползуна скользит по верхней перекладине мостика. При прохождении острием мертвой точки, мостик выходит из состояния устойчивого равновесия и со скоростью, задаваемой пружиной, перебрасывается в другое положение. Промышленностью выпускаются датчики положения мгновенного действия следующих типов: ВК-200; ВК-300; ВПК-11 – универсальные, общего назначения; КУ70 – специализированные крановые (пустые позиции – номер типоисполнения). Внешний вид конечного выключателя КУ701 приведен на рис. 33. Роликовые рычаги, характерные для датчиков мгновенного действия типов ВК и КУ, приведены на рис. 31, г, д. Селективный роликовый рычаг обладает скошенным роликом, подпружиненным пружиной кручения. При заходе управляющего элемента на ролик со стороны скоса (на рис. 31,д – слева) ролик поворачивается, пропуская упор без перемещения рычага. При заходе справа рычаг отклоняется, и датчик срабатывает. Срок службы этих датчиков не зависит от скорости перемещения управляющего элемента и составляет порядка 20´106 циклов срабатывания. Недостатком является относительная сложность механической части.
Герконовые датчики положения. Искрение контактов возможно только в воздушной среде, содержащей кислород. В среде инертных газов (например, аргон, гелий) и в вакууме электрический разряд не происходит. При этом значительно уменьшаются размеры контактов, а срок службы становится практически неограниченным (по паспорту – до 109 циклов срабатывания). Это удалось реализовать в герметичных контактных группах – герконах. Герконы являются составной частью герконовых датчиков положения и реле.
Герконовые датчики положения могут быть магнитозамыкающие (рис. 34,а) и магнитозамкнутые (рис. 34,б). Геркон представляет собой миниатюрную стеклянную ампулу, заполненную инертным газом, чаще всего аргоном. Ранее выпускались герконы с вакуумными ампулами. В нее впаяны упругие нормально разомкнутые контакты из пермаллоя. Управляющим элементом магнитозамыкающего герконового датчика является постоянный магнит. При отсутствии магнита контакты за счет собственной упругости разомкнуты.
а
| б
|
| Рис. 34. Герконовые датчики положения: а – магнитозамыкающие; б – магнитозамкнутые |
При приближении магнита контакты, притягиваясь к нему, замыкаются.
У магнитозамкнутого герконового датчика магнит смонтирован в одном корпусе с герконом, постоянно замыкая его контакты.
Управляющим элементом является экран, вводимый в зазор между магнитом и герконом. Магнитная связь при этом нарушается и контакты размыкаются. Герконовые датчики положения обладают многими достоинствами. Они надежны (долговечность их ограничивается только усталостной изгибной выносливостью контактов), миниатюрны, удобны в монтаже. Вместе с тем вибрация и удары могут привести к ложному срабатыванию. Последнее резко ограничивает сферу их применения. Так, отечественные промышленные роботы первоначально комплектовались преимущественно датчиками такого типа. Но удары в конце хода плохо сдемпфированных приводов приводили к частым ложным срабатываниям, что заставило отказаться от их применения. Известное распространение герконовые датчики положения получили в автоматизированном металлорежущем оборудовании, охранной сигнализации, клавиатуре ЭВМ.
Электронные бесконтактные датчики положения. В отличие от предыдущих, бесконтактные датчики положения не имеют электрических контактов в выходной цепи (отсюда и название). Принципиальная схема изображена на рис. 35. Принцип действия полупроводникового транзистора был нами рассмотрен ранее, в соответствующей лекции. Для пояснения принципа действия бесконтактного датчика нам необходимо вспомнить условие открытости эмиттерно-коллекторной цепи транзистора с n–p–n-переходом. Эмиттерно-коллекторная цепь открыта (т. е. с эмиттера на коллектор протекает ток, в десятки и сотни раз больший, чем с эмиттера на базу) если на эмиттере положительный потенциал, на базе – тоже положительный, но меньший, на коллекторе – отрицательный.
Рис. 35. Принципиальная схема бесконтактного датчика положения
Первая рабочая ситуация – на входе датчика отсутствует сигнал. Рассмотрение работы датчика начнем с транзистора T1. Как видно по схеме, и база, и эмиттер подключены к положительной клемме питания, причем база – через сопротивление R1 (так называемое сопротивление базы). Это сопротивление служит для создания разницы потенциалов между эмиттером и базой, которая, кроме этого, связана с отрицательной клеммой питания через цепь R2 R3. Коллектор связан с отрицательной клеммой питания через цепь L1–R3. Как видим, условие открытости соблюдено. Коллектор связан с базой цепью обратной связи L1–R2. Эта схема представляет собой простейший мультивибратор –генератор колебаний. Работает он следующим образом. В начальный момент времени транзистор открыт, и по коллектору протекает ток. На прохождение электрическим током цепи L1–R2 требуется некоторое время. Через это время за счет поступления с коллектора по цепи обратной связи положительного потенциала потенциал на базе возрастает, и транзистор запирается. Ток в цепи обратной связи прекращается, потенциал на базе уменьшается до первоначального значения, и цикл повторяется. Таким образом в цепи L1–R2 генерируется переменный ток. Параллельно эмиттерной цепи подключен колебательный контур C1–L2. В данном случае он является резонатором – настроен в резонанс с колебаниями, генерируемыми мультивибратором. Катушки L1 и L2 являются индуктором переменного магнитного поля W. Магнитное поле воспринимается приемником – индуктивностью L3, преобразуясь в нем в переменную эдс. Далее ток поступает в контур из диода D1 и конденсатора C2. Они представляют собой простейший сглаживающий выпрямитель. После диода переменный ток преобразуется в отнулевой пульсирующий. В момент пика тока излишний ток заряжает конденсатор, а в момент токового провала конденсатор разряжается, сглаживая пульсацию. Выпрямленный таким образом положительный потенциал подается на базу транзистора Т2. База транзистора связанна с положительной шиной питания через сопротивление R 4, а эмиттер – через R6, причем R 4< R6. При отсутствии на базе дополнительного отрицательного потенциала от выпрямителя транзистор закрыт, а в данном случае – открыт. Коллектор транзистора Т2 связан с базой транзистора Т3. При открытости Т2 на базу Т3 подается положительный потенциал, Т3 также открыт, и сопротивление эмиттер-коллекторной цепи последнего незначительно. Эмиттер и коллектор транзистора Т3 связаны с выходными клеммами датчика. В нормальном состоянии выходная цепь датчика оказывается замкнутой.
Вторая рабочая ситуация – на входе датчика появляется сигнал. Управляющим элементом датчика является экран, вводимый в зазор между индуктором и приемником. При этом магнитная связь между ними нарушается, и с базы транзистора Т2 исчезает дополнительный потенциал смещения. Транзистор закрывается, положительный потенциал на базу Т3 не подается, последний закрывается. Сопротивление эмиттер-коллекторной цепи возрастает настолько, что между выходными клеммами датчика электрическая цепь практически разрывается. Датчик сработал.
Торцевой типа БТП (рис. 36,а) и щелевой типа КВЛ (рис. 36,б) датчики отличаются компоновкой. Торцевой датчик размещен в резьбовом цилиндрическом корпусе. В торце его концентрически расположены индукторы и приемник. Магнитное поле между ними имеет тороидные силовые линии. Управляющий экран приближается к этому торцу. Корпус щелевого датчика имеет вырез между индуктором и приемником. Управляющий экран вводится в этот вырез. Элементы электрических схем для герметичности заливаются компаундом.
| а | б |
| 
|
Рис. 36. Электронные бесконтактные датчики: а – торцевой; б – щелевой
Бесконтактные датчики обладают практически неограниченным сроком службы, высокой надежностью, довольно малогабаритны, не требуют эксплуатационного обслуживания и просты в монтаже. К их недостаткам можно отнести сравнительно высокую стоимость и высокие требования к качеству стабилизации напряжения питания (по паспортным данным – постоянный ток напряжением 24±0,2 В).
 Индукционные бесконтактные датчики положения. Индукционные датчики стоят несколько особняком в ряду остальных датчиков положения. В отличие от контактных и герконовых датчиков, выходная цепь которых имеет состояния «Цепь разомкнута» и «Цепь замкнута» или бесконтактных электронных «Цепь практически разомкнута» и «Цепь замкнута», индукционные датчики обладают состояниями выходной цепи «Цепь обладает большим сопротивлением» и «Цепь обладает малым сопротивлением». Рассмотрим принцип действия данных датчиков на примере бесконтактного конечного выключателя (БКВ) (рис. 37). Датчик имеет две катушки индуктивности L1 и L2, установленные на общем магнитопроводе. Поворотный якорь является рабочим элементом выключателя, контактирующим с управляющим элементом (на рисунке не показан). Между плечами якоря и магнитопроводом имеются зазоры d1 и d2. При переключении выключателя зазоры изменяются. Известно, что полное сопротивление индукционной катушки в цепи переменного тока
Индукционные бесконтактные датчики положения. Индукционные датчики стоят несколько особняком в ряду остальных датчиков положения. В отличие от контактных и герконовых датчиков, выходная цепь которых имеет состояния «Цепь разомкнута» и «Цепь замкнута» или бесконтактных электронных «Цепь практически разомкнута» и «Цепь замкнута», индукционные датчики обладают состояниями выходной цепи «Цепь обладает большим сопротивлением» и «Цепь обладает малым сопротивлением». Рассмотрим принцип действия данных датчиков на примере бесконтактного конечного выключателя (БКВ) (рис. 37). Датчик имеет две катушки индуктивности L1 и L2, установленные на общем магнитопроводе. Поворотный якорь является рабочим элементом выключателя, контактирующим с управляющим элементом (на рисунке не показан). Между плечами якоря и магнитопроводом имеются зазоры d1 и d2. При переключении выключателя зазоры изменяются. Известно, что полное сопротивление индукционной катушки в цепи переменного тока
 , (17)
, (17)
где R – активное сопротивление катушки, (Lw) – индуктивное сопротивление, w = 2pf – угловая частота переменного тока с частотой f; L – индуктивность катушки
 , (18)
, (18)
где W – число витков катушки, S – площадь сечения потока в воздушном зазоре; d – величина воздушного зазора. Следовательно, приняв за константы R, w, W, S, можно записать
Z=F(d). (19)
Параметры датчика БКВ приняты таковыми, что сопротивление выходных цепей 1–2 и 3–4 во включенном и выключенном положении отличаются на несколько порядков (в тысячи раз).
Таким образом, одна из выходных цепей оказывается практически разомкнутой (ток по ней течет, но очень малый), а вторая – замкнутой и при переключении датчика положение цепей меняется.
К достоинствам датчика стоит отнести его высокую надежность. К недостаткам – ограничение по применимости (только в цепях переменного тока), высокие требования к стабильности частоты питающего напряжения.
Дата добавления: 2015-01-21; просмотров: 8274;